因为ros2的gazebo_ros_pkgs中,已经将该插件移除,或者说将该插件的功能合并到libgazebo_ros_camera.so中,
这里是作者的说明。
 合并后,深度相机的用法参考这里。
合并后,深度相机的用法参考这里。
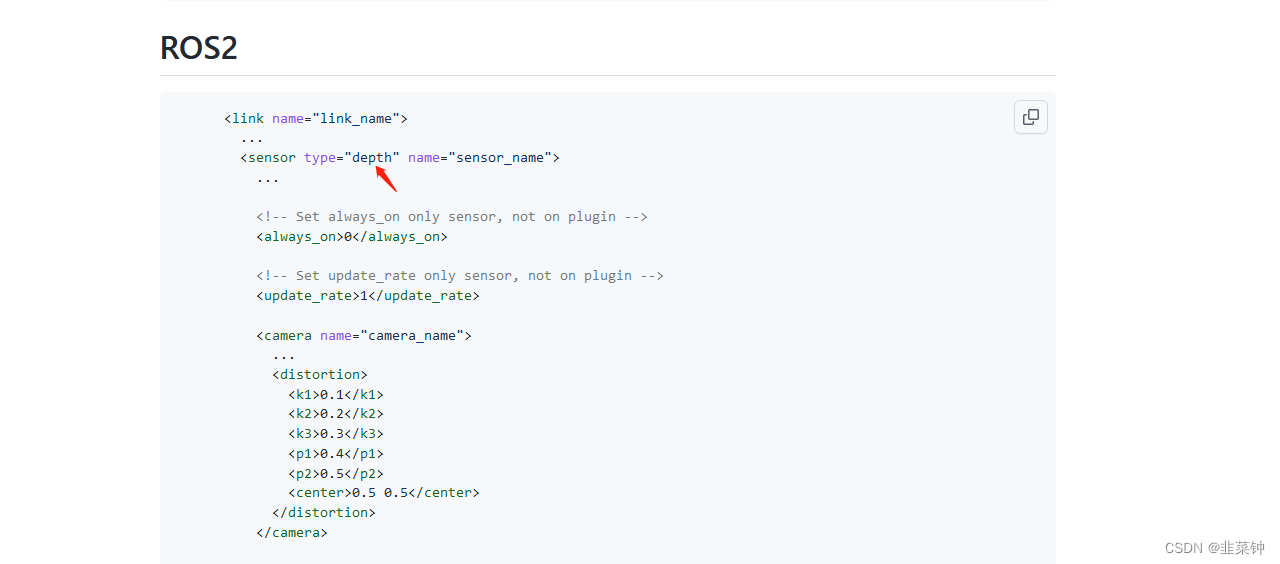 主要是将type改成depth。还有其他类型的相机,可以参考具体的说明。
主要是将type改成depth。还有其他类型的相机,可以参考具体的说明。
在gazebo中添加完深度相机之后,假如在rviz中查看点云,会发现点云的坐标有问题。据说这是个gazebo的bug,解决办法看这里。
修改完之后,可能还需要到install目录里面删除相应的urdf文件,然后再编译,才会刷新。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)