最近在使用Quanser的地面车做实验,需要用到OptiTrack系统进行定位,记录一下使用过程,供需要的人参考。
本文参考了以下博客:
https://blog.csdn.net/banzhuan133/article/details/77938083
https://www.pianshen.com/article/93051595787/
注意1:场地如果反光,可以通过通过调节相机THR值进行过滤;对于实在无法去除的标志点,可以选择Camera Calibration 窗口中Calibration 选项卡下的Block Visible选项去除画面中无法消除的干扰点。
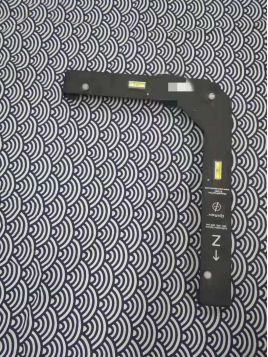
首先将标记球固定在需要定位的物体上,如下所示: 注意2:至少需要三个Mark,图中只有两个,我后来又加了一个。
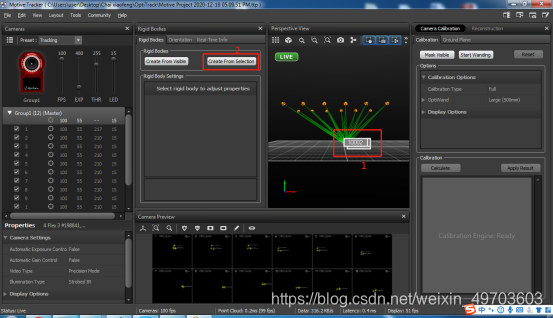
打开上次标定的工程,将目标刚体放入场地中央,在perspective view视角中选中光点,rigid body->creat from selected marks
设置中心点位置。选中顶点mark,鼠标右击,rigid body->set pivot point to selected marker。
将中心点位置下移到真正的中心,左边控制面板orientation,修改y轴为-0.14(顶点距离中心的距离的负值),然后apply translation。
保存刚体文件为(.tra格式)