
更快、更准、更高效—惯导RTK倾斜测量,让工人早点回家
DETA10T
近日,FDISYSTEMS推出支持惯导RTK倾斜测量的DETA10T,将DETA10N在其他领域的成功应用引入到工程测量领域,创新的采用了组合导航技术以及更简单的校准算法简化了测量准备工作,同时通过自身强大的SPKF数据融合引擎,让精度更高,鲁棒性更好。支持外接多种GNSS协议,包括主流协议NMEA0183、UBLOX和UNICORE的接收机,从而使用户在GNSS芯片选型上更加自由。

要点
01 产品技术背景
在桥梁、建筑、农业、铁路等很多工程领域都需要测量精确地理坐标信息,需要用到测绘一体机,传统测绘一体机需要测绘人员利用对中杆的气泡使一体机保持水平,一体机的天线相位中心经纬度即为对中杆底端测量点的经纬度,测量点的高度则是一体机的天线相位中心高度减去已知的杆子底部到一体机天线相位中心距离即可。但为保证精度,这种方法需要测绘人员维持对中的时间约半分钟左右,难度较大且影响测绘效率。另外在某些情况下,比如在建筑物墙边,由于GNSS接收机的体积限制,无法达到对中杆垂直的要求,对于作业效率是一个损失。
现有的做法是使用倾角传感器和磁强传感器组成的角度测量系统来分别直接测量姿态角和方位角。但这种做法存在如下几点不足:
(1)倾角传感器只在静止时输出的角度精度才可用,如果由于风等外力因素使杆子有晃动,则输出的倾角精度有损失;
(2)在磁环境碰到突然的变化,例如附近有汽车经过时,方位角会有较大的误差,并可能有较大的跳动;
(3)在用户未知磁环境好坏的情况下,进行磁标定之后,可能会造成标定结果带有较大误差,直接降低后边使用时的精度;
(4)为控制成本,传感器一般采用低成本的器件,低成本器件的可靠性难以百分百保证。因此现有技术中的倾斜测量方法存在输出的倾角精度低以及方位角有较大误差的问题。
02 RTK倾斜测量技术原理
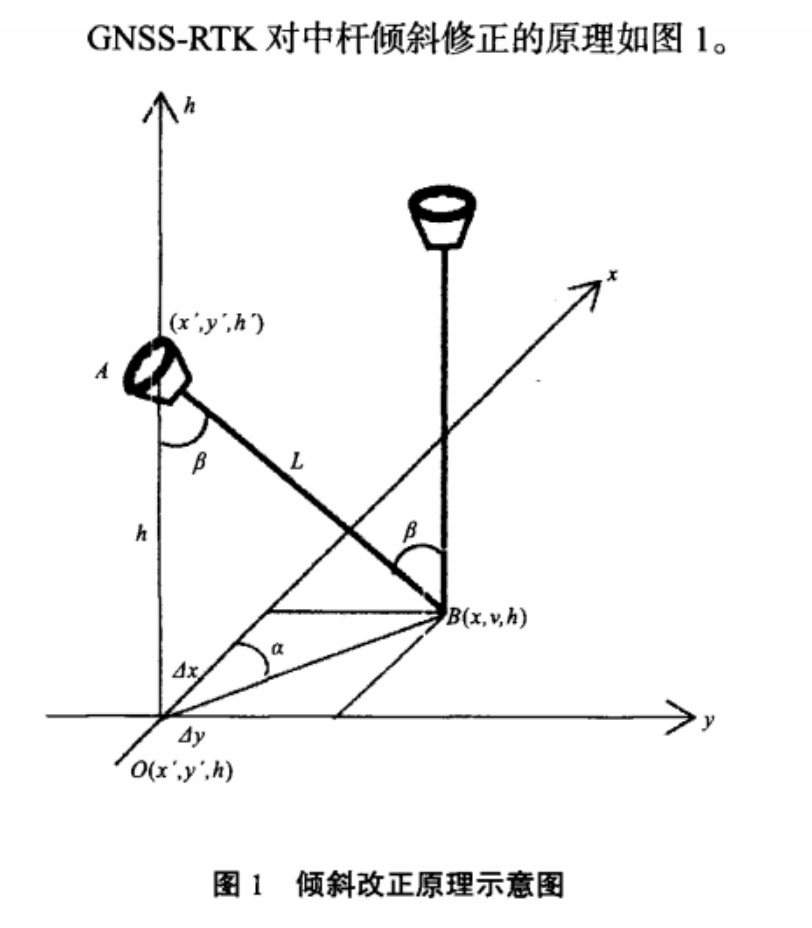
在三维直角坐标系中,RTK对中杆在常规测量中处于垂直状态进行观测B点坐标(x,y,h),当对中杆倾斜到A点位置时观测出当前状态下坐标(x’,y’,h’),通过倾斜改正,理论上可以由倾斜状态下的实测A点坐标(x’,y’,h’)计算出B点待测点坐标(x,y,h),即

其中:β为对中杆倾斜角度;α为对中杆倾斜时投影到平面坐标系中的方位角;dx、dy、dh坐标增量;L是对中杆杆长。
惯性导航系统(INS,Inertial Navigation System)也称作惯性参考系统,是一种不依赖于外部信息、也不向外部辐射能量的自主式导航系统。惯性导航系统中的陀螺仪用来形成一个导航坐标系,使加速度计的测量轴稳定在该坐标系中,并实时计算横滚角,俯仰角以及偏航角。倾斜方位角α和对中杆倾角β可以通过上述的姿态角转换获得。因此在任何倾斜角度下,通过惯性导航系统获取到的姿态角数据,就能计算出中杆底部待测位置(x,y,h)。
03 FDI 在RTK倾斜测量中的应用与优势
应用一:为了解决现有测绘一体机因带磁角度测量系统而引起的作业效率低和倾斜测量误差大等问题,FDISTSTEMS提供一种基于GNSS接收机和IMU传感器的测绘一体机的倾斜测量方法:
采用先进的非线性SPKF滤波算法,将IMU陀螺仪和加速度计传感器的零偏误差等未知变量作为状态量,将RTK输出的经纬度高度以及速度作为观测数据,对设计的多维未知状态量进行预测和修正之间的多次相互循环,使得多维未知状态量不断地趋近于真实值,进而基于多维未知状态量,可以高效且准确地得到从XYZ坐标系到NED坐标系的最新3维姿态角(即横滚角、俯仰角和航向角)以及最新旋转矩阵,最后通过几何变换把GNSS接收机的天线相位中心的坐标映射到对中杆末端位置的坐标,从而完成倾斜测量。
其优势在于,可以完全把测量工作人员从水泡对中整平的任务解放出来,提升作业效率;此外FDISYSTEMS提供杆臂修改接口,可使IMU传感器放在GNSS接收机内部的任何地方,另外可以包含磁传感器,也可以不包含,提升了测绘一体机的设计灵活性和生产难度,便于实际应用和推广。
应用二:测绘一体机需要要求对中杆与IMU坐标系的Z轴严格平行,但实际上,不经过校准的设备并不能满足这个要求。因此,FDISYSTEMS针对安装俯仰角和安装横滚角进行了估计,以便消除设备组装过程中带来的角度误差,进而降低设备的使用条件,适应各种对中杆:
如下图所示,用户按照提示进入安装误差角测量模式后,只需要前后摇晃一体机,等数据记录完成后转动90°继续摇晃,直到4个方位ABCD的数据均采集完成,此时安装误差角计算完成。

其优势在于,既可以消除设备组装过程中带来的角度误差,还可以消除由于对中杆不垂直(例如弯曲)所带来的角度误差,降低设备的使用条件,适应各种对中杆,在作业过程中可以自校准,相较于传统GNSS倾斜测量和竞争产品,大幅度地提高了作业效率和准确率,减少了不必要的生产流程。
此外,如果用户能够垂直固定对中杆(水泡居中),FDISYSTEMS还提供安装角一键校准功能,只需输入一条指令或者点击上位机按钮即可实现一键校准,快速方便。
04 RTK倾斜测量中的应用与优势

FDISYSTEMS同时免费提供自主研发的上位机软件,在RTK倾斜测量作业中,用户既可以通过上位机软件配置相关参数,读取相关数据,也能根据手册协议用串口指令的方式进行配置和读取。
根据实际测试的结果,在倾斜角度0-60°的范围内(采用组合导航方案支持3D测量),FDISYSTEMS提出的RTK倾斜测量方案的倾斜补偿精度<2cm,满足测绘所需的精度要求。
每一个轴的传感器出厂前都要在FDISYSTEMS的制造工厂进行专业的校准和测试验收,并保存每个产品出厂的校准数据唯一的固件和检测报告。FDISYSTEMS提供所有产品生命周期内的软件升级和全面测试,以验证持续符合所有性能规范。

了解更多DETA10T产品信息联系我们:
电话|15656549568
网站|fdisystems.com
关于我们
安徽飞迪航空科技有限公司(FDIsystems)技术总部位于中国科学技术大学先进技术研究院,是一家专注导航技术和产品的开发和制造商,产品包含惯性、卫星、视觉等导航系统。自2018年成立以来,为自主驾驶、军事、航空、海洋和工业机器人、教育等行业的系统集成商提供了针对SWaP-C约束优化的嵌入式导航解决方案。FDIsystems在多源信息融合和传感器校准技术方面拥有独特的专业知识。在航空航天和海军舰艇应用领域有着多年的技术和研究经历。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)