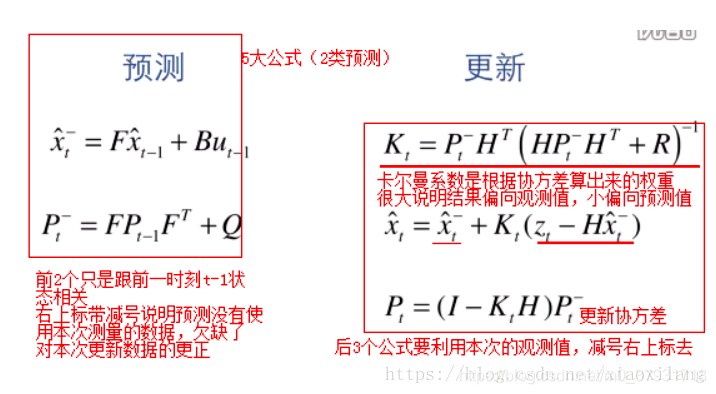
导:ekf,扩展卡尔曼滤波简称,应用非常广泛; 1.五个黄金公式
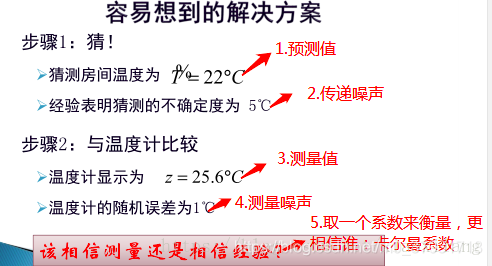
2.应用场合
1)找清楚模型
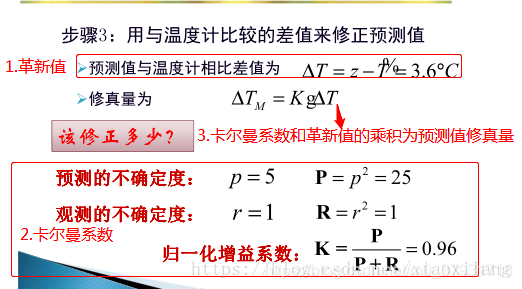
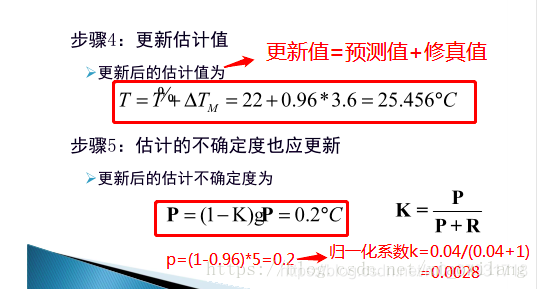
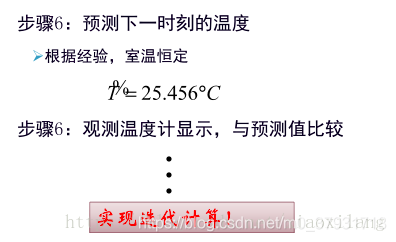
2)对准五个公式的公式 3)实现:求革新值,卡尔曼系数,进而求到修真量大小 4)估计值和协方差的计算,利于下次迭代使用
5)迭代 参考论文:https://blog.csdn.net/xiaoxilang/article/details/80533049?utm_source=copy