一、Ubuntu20.04的安装
暑期在我导那里确认好研究方向后,一个人摸爬滚打走来确实走了不少弯路,遂决定写下这篇文章来帮助有需要的朋友来避坑。本次安装是通过VMware来创建一台虚拟机进行后续操作,之所以选择20.04而不是最新版的是因为Ubuntu22.04没有与之对应的ROS1版本,这会导致后边ROS系统安装不成功。
1.下载VMware 下载 VMware Workstation Pro | CN
进入系统界面点击【帮助】栏中的输入许可证密钥 YF390-0HF8P-M81RQ-2DXQE-M2UT6即可正常使用,如果后续这个密钥过期了也可以自行去网上搜索。
2.下载镜像文件 Tsinghua Open Source Mirror
进入上述网址可下载清华大学的镜像文件,选择Ubuntu-20.04.5-desktop-amd64.iso文件下载即可。
3.创建虚拟机
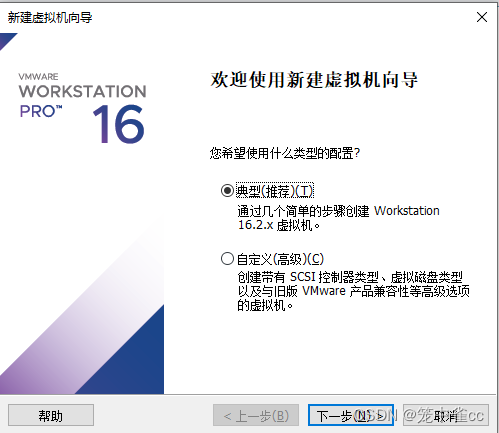
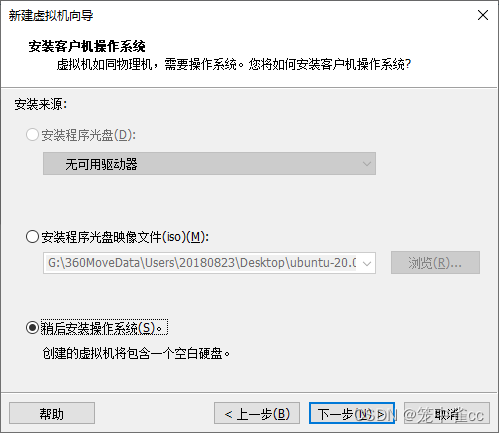
点击下一步后,选择稍后安装操作系统。
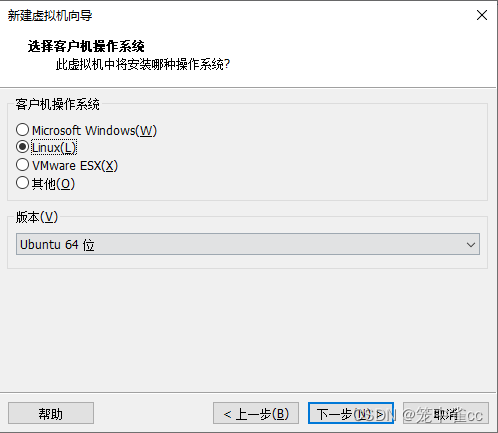
选择Linux系统以及Ubuntu64位。
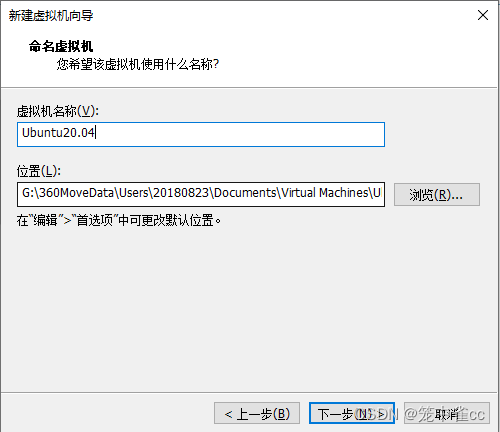
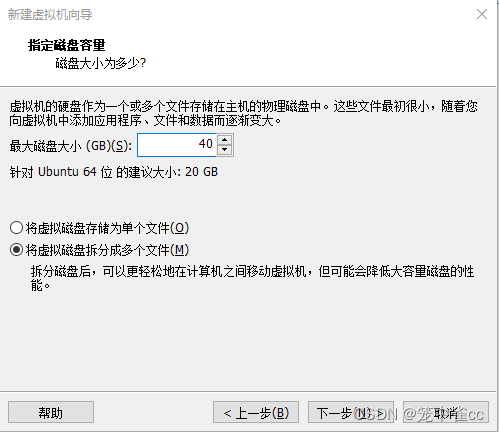
根据自己需求设置磁盘大小(其实在虚拟机上的话也无所谓,后边需要改也很方便)。
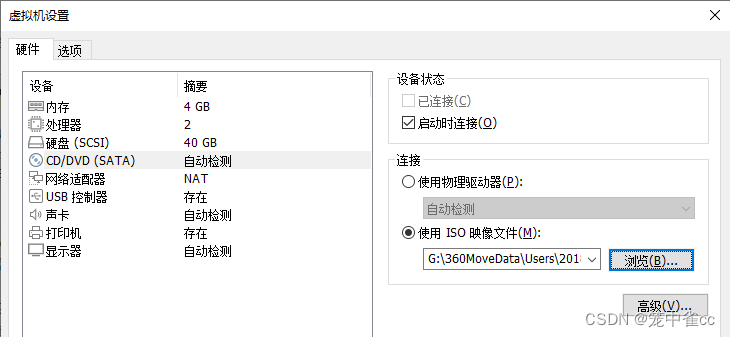
点击完成后,进入编辑虚拟机设置选项,在硬件CD/DVD(SATA)一栏选择使用之前下好的ISO映像文件。然后就可以打开虚拟机了。
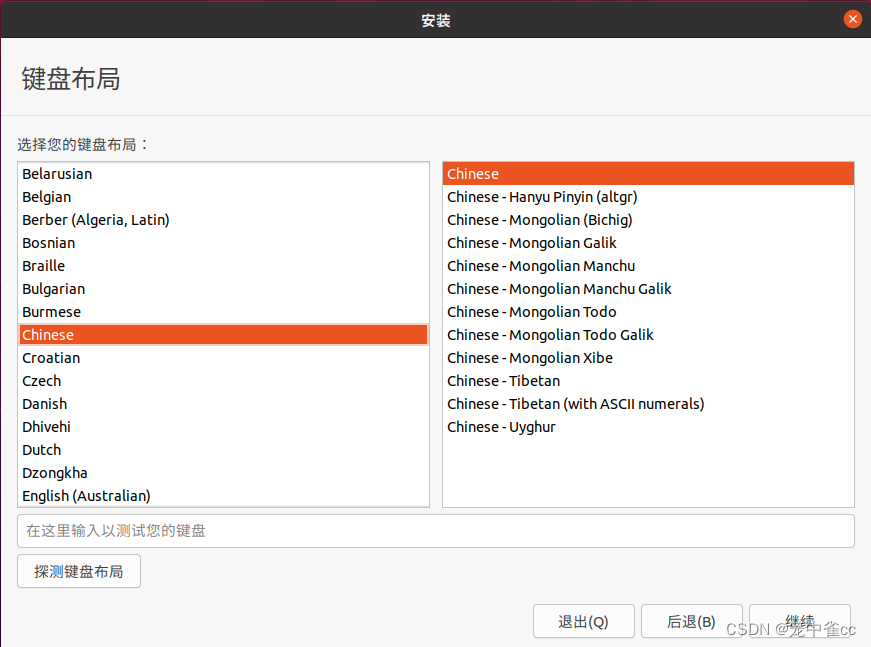
等待一会便会出现下图界面,选择好语言安装Ubuntu。

默认选项并继续。
下边选项建议将安装Ubuntu时下载更新取消掉,后续用到的时候再去更新也无妨,当然了如果时间充裕的话也可以选上。

这里因为是虚拟机也可以不用管,选择现在安装,后边弹窗也默认继续。

这里只要是选择这个时区应该都是默认的上海了。

设置自己的信息并继续就可以安装了,等待时间可能稍微有点长。
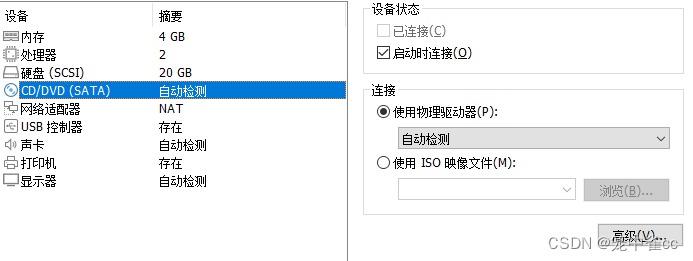
安装完成后系统会直接重启,记得将该状态栏重新调整为使用物理驱动器。

选项一栏中将共享文件夹启用并设置相关路径可以实现文件夹的交互(直接拖拽)。另外最新的几个版本都是自动安装了VMware Tools可以直接全屏,再古老一点的版本需要自行安装。如果最近的几个版本不能全屏或者是看着不舒适可以点击虚拟机右上方关机键,选择设置选项并进入显示器调整分辨率。

最后上方虚拟机有个神奇的功能叫快照,可以记录当前虚拟机的状态(血的教训!!!推荐各位还是设置一下,不然后边莫名其妙系统崩了其他方法也解决不了的话只能重新安装,天知道我这一两个月装了多少回,现在养成了习惯,每有一个大的改动就快照一下。)
到这里第一大块Ubuntu系统的安装就完成了,下面将介绍怎么安装ROS系统。
二、ROS系统的安装(noetic)
右键选择在终端打开或者快捷键CTRL+ALT+T打开终端输入。
1.添加ROS软件源
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.添加密钥
$ sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3.添加密钥
$ sudo apt update
$ sudo apt install ros-noetic-desktop-full
上述noetic为Ubuntu20.04对应的ROS版本,若要安装其他版本可自行更换成melodic等。
4.初始化rosdep(最新的几个版本可以省略)
5.设置环境变量
$ echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
6.安装rosinstall
$ sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
7.检验环节
打开终端输入roscore,安装成功便会显示ROS系统的版本号。

接着我们就可以跑一个简单的小海龟例程了。另起终端并输入下代码即可看到一只小海龟。
$ rosrun turtlesim turtlesim_node
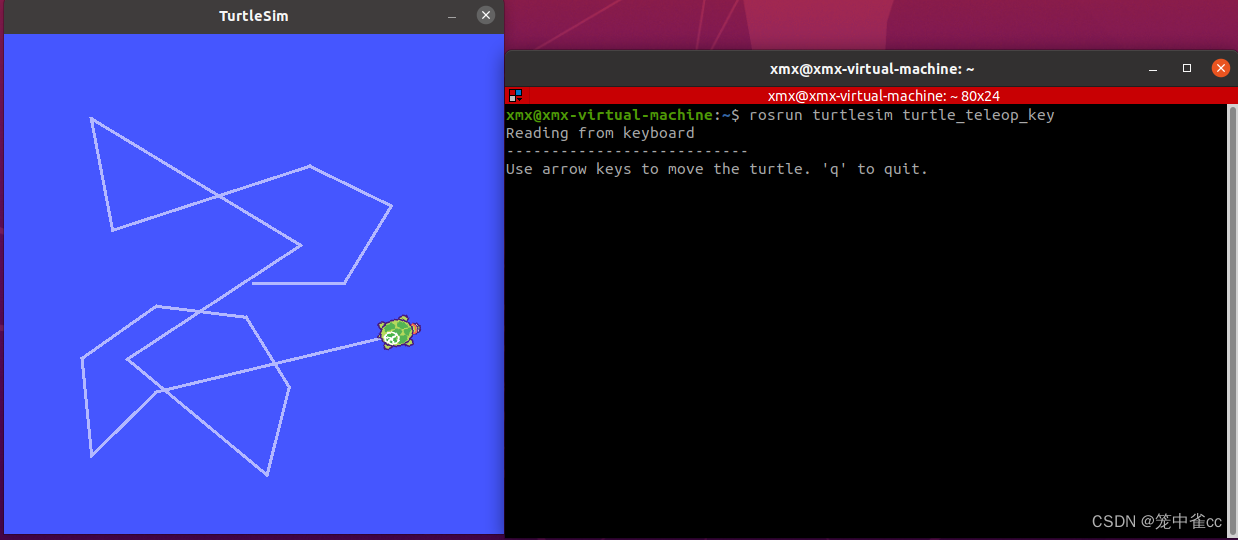
再另起一个终端还可以实现用键盘控制小海龟的移动。
$ rosrun turtlesim turtle_teleop_key
写在最后,如果仅仅只是想体验一下装虚拟机就行,耗时短,交互比较方便,还有快照功能,可以避免很多问题,但要是想深入研究还是要去安装双系统的,虚拟机在某些地方就不能满足你的性能要求了。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)