#gazebo 仿真
1. 给 base_link 添加惯性,碰撞以及 gazebo 属性
在路径xqrobot_description/urdf/xacro ⽂件夹下新建⽂件夹 gazebo,并在 gazebo ⽂件下创建xqrobot_base_gazebo.xacro ⽂件。
lzw08@ubuntu:~$ cd ros_ws/src/xqrobot_description/urdf/xacro/
lzw08@ubuntu:~/ros_ws/src/xqrobot_description/urdf/xacro$ mkdir gazebo
lzw08@ubuntu:~/ros_ws/src/xqrobot_description/urdf/xacro$ cd gazebo/
lzw08@ubuntu:~/ros_ws/src/xqrobot_description/urdf/xacro/gazebo$ touch xqrobot_base_gazebo.xacro
lzw08@ubuntu:~/ros_ws/src/xqrobot_description/urdf/xacro/gazebo$ gedit xqrobot_base_gazebo.xacro
粘贴以下代码:
<?xml version="1.0"?>
<robot name="mbot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- PROPERTY LIST -->
<xacro:property name="M_PI" value="3.1415926"/>
<xacro:property name="base_mass" value="20" />
<xacro:property name="base_radius" value="0.20"/>
<xacro:property name="base_length" value="0.16"/>
<xacro:property name="wheel_mass" value="2" />
<xacro:property name="wheel_radius" value="0.06"/>
<xacro:property name="wheel_length" value="0.025"/>
<xacro:property name="wheel_joint_y" value="0.19"/>
<xacro:property name="wheel_joint_z" value="0.05"/>
<xacro:property name="caster_mass" value="0.5" />
<xacro:property name="caster_radius" value="0.015"/> <!-- wheel_radius - ( base_length/2 - wheel_joint_z) -->
<xacro:property name="caster_joint_x" value="0.18"/>
<!-- Defining the colors used in this robot -->
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material>
<!-- Macro for inertia matrix -->
<xacro:macro name="sphere_inertial_matrix" params="m r">
<inertial>
<mass value="${m}" />
<inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"
iyy="${2*m*r*r/5}" iyz="0"
izz="${2*m*r*r/5}" />
</inertial>
</xacro:macro>
<!-- 圆柱体转动惯量矩阵宏定义-->
<xacro:macro name="cylinder_inertial_matrix" params="m r h">
<inertial>
<mass value="${m}" />
<inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"
iyy="${m*(3*r*r+h*h)/12}" iyz = "0"
izz="${m*r*r/2}" />
</inertial>
</xacro:macro>
<!-- Macro for robot wheel -->
<xacro:macro name="wheel" params="prefix reflect">
<joint name="${prefix}_wheel_joint" type="continuous">
<origin xyz="0 ${reflect*wheel_joint_y} ${-wheel_joint_z}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
<material name="gray" />
</visual>
<collision>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${wheel_mass}" r="${wheel_radius}" h="${wheel_length}" />
</link>
<gazebo reference="${prefix}_wheel_link">
<material>Gazebo/Gray</material>
</gazebo>
<!-- Transmission is important to link the joints and the controller -->
<transmission name="${prefix}_wheel_joint_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${prefix}_wheel_joint" >
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="${prefix}_wheel_joint_motor">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
<!-- Macro for robot caster ⽀撑轮宏定义 -->
<xacro:macro name="caster" params="prefix reflect">
<joint name="${prefix}_caster_joint" type="continuous">
<origin xyz="${(reflect*caster_joint_x)} 0 ${-(base_length/2 + caster_radius)}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
<material name="black" />
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
</collision>
<sphere_inertial_matrix m="${caster_mass}" r="${caster_radius}" />
</link>
<gazebo reference="${prefix}_caster_link">
<material>Gazebo/Black</material>
</gazebo>
</xacro:macro>
<!---机器⼈本体宏定义-->
<xacro:macro name="xqrobot_base_gazebo">
<link name="base_footprint">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.001 0.001 0.001" />
</geometry>
</visual>
</link>
<gazebo reference="base_footprint">
<turnGravityOff>false</turnGravityOff>
</gazebo>
<joint name="base_footprint_joint" type="fixed">
<origin xyz="0 0 ${base_length/2 + caster_radius*2}" rpy="0 0 0" />
<parent link="base_footprint"/>
<child link="base_link" />
</joint>
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
<material name="yellow" />
</visual>
<collision>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${base_mass}" r="${base_radius}" h="${base_length}" />
</link>
<gazebo reference="base_link">
<material>Gazebo/Blue</material>
</gazebo>
<wheel prefix="left" reflect="-1"/>
<wheel prefix="right" reflect="1"/>
<caster prefix="front" reflect="-1"/>
<caster prefix="back" reflect="1"/>
<!--caster prefix="back" reflect="1"/-->
<!-- controller -->
<gazebo>
<plugin name="differential_drive_controller"
filename="libgazebo_ros_diff_drive.so">
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<robotNamespace>/</robotNamespace>
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<legacyMode>true</legacyMode>
<leftJoint>left_wheel_joint</leftJoint>
<rightJoint>right_wheel_joint</rightJoint>
<wheelSeparation>${wheel_joint_y*2}</wheelSeparation>
<wheelDiameter>${2*wheel_radius}</wheelDiameter>
<broadcastTF>1</broadcastTF>
<wheelTorque>30</wheelTorque>
<wheelAcceleration>1.8</wheelAcceleration>
<commandTopic>cmd_vel</commandTopic>
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic>
<robotBaseFrame>base_footprint</robotBaseFrame>
</plugin>
</gazebo>
</xacro:macro>
</robot>
2. 在路径xqrobot_description/urdf/xacro/sensors 文件夹下创建 lidar_gazebo.xacro 文件
lzw08@ubuntu:~/ros_ws/src/xqrobot_description/urdf/xacro/gazebo$ cd ..
lzw08@ubuntu:~/ros_ws/src/xqrobot_description/urdf/xacro$ cd sensors/
lzw08@ubuntu:~/ros_ws/src/xqrobot_description/urdf/xacro/sensors$ touch lidar_gazebo.xacro
lzw08@ubuntu:~/ros_ws/src/xqrobot_description/urdf/xacro/sensors$ gedit lidar_gazebo.xacro
粘贴以下代码:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="laser">
<xacro:macro name="rplidar" params="prefix:=laser">
<!-- Create laser reference frame -->
<link name="${prefix}_link">
<inertial>
<mass value="0.1" />
<origin xyz="0 0 0" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0"
iyy="0.01" iyz="0.0"
izz="0.01" />
</inertial>
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<material name="black"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
<geometry>
<cylinder length="0.06" radius="0.05"/>
</geometry>
</collision>
</link>
<gazebo reference="${prefix}_link">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="${prefix}_link">
<sensor type="ray" name="rplidar">
<pose>0 0 0 0 0 0</pose>
<visualize>false</visualize>
<update_rate>5.5</update_rate>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1</resolution>
<min_angle>-3</min_angle>
<max_angle>3</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>6.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="gazebo_rplidar" filename="libgazebo_ros_laser.so">
<topicName>/scan</topicName>
<frameName>laser_link</frameName>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
</robot>
3. 在 gazebo 中显示机器人模型
在xqrobot_description/urfd/xacro/gazebo ⽬录下创建xqrobot_gazebo.xacro ⽂件。
lzw08@ubuntu:~/ros_ws/src/xqrobot_description/urdf/xacro/sensors$ cd ..
lzw08@ubuntu:~/ros_ws/src/xqrobot_description/urdf/xacro$ cd gazebo/
lzw08@ubuntu:~/ros_ws/src/xqrobot_description/urdf/xacro/gazebo$ touch xqrobot_gazebo.xacro
lzw08@ubuntu:~/ros_ws/src/xqrobot_description/urdf/xacro/gazebo$ gedit xqrobot_gazebo.xacro
粘贴以下代码:
<?xml version="1.0"?>
<robot name="arm" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find xqrobot_description)/urdf/xacro/gazebo/xqrobot_base_gazebo.xacro" />
<xacro:include filename="$(find xqrobot_description)/urdf/xacro/sensors/lidar_gazebo.xacro" />
<xacro:property name="lidar_offset_x" value="0" />
<xacro:property name="lidar_offset_y" value="0" />
<xacro:property name="lidar_offset_z" value="0.105" />
<!--mbot_base/-->
<!-- lidar -->
<joint name="lidar_joint" type="fixed">
<origin xyz="${lidar_offset_x} ${lidar_offset_y} ${lidar_offset_z}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="laser_link"/>
</joint>
<xacro:rplidar prefix="laser"/>
<xqrobot_base_gazebo/>
</robot>
4. 创建display_xqrobot_gazebo.launch文件
lzw08@ubuntu:~/ros_ws/src/xqrobot_description/urdf/xacro/gazebo$ cd ../../..
lzw08@ubuntu:~/ros_ws/src/xqrobot_description$ cd launch/
lzw08@ubuntu:~/ros_ws/src/xqrobot_description/launch$ touch display_xqrobot_gazebo.launch
lzw08@ubuntu:~/ros_ws/src/xqrobot_description/launch$ gedit display_xqrobot_gazebo.launch
粘贴以下代码:
<?xml version="1.0"?>
<launch>
<!-- 设置launch⽂件的参数 -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- 运⾏gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 加载机器⼈模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find xqrobot_description)/urdf/xacro/gazebo/xqrobot_gazebo.xacro'" />
<!-- 运⾏joint_state_publisher节点,发布机器⼈的关节状态 -->
<node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" ></node>
<!-- 运⾏robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<!-- 在gazebo中加载机器⼈模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen" args="-urdf -model mrobot -param robot_description"/>
</launch>
5. 回到工作空间运行
lzw08@ubuntu:~/ros_ws/src/xqrobot_description/launch$ cd ~/ros_ws
lzw08@ubuntu:~/ros_ws$ source devel/setup.bash
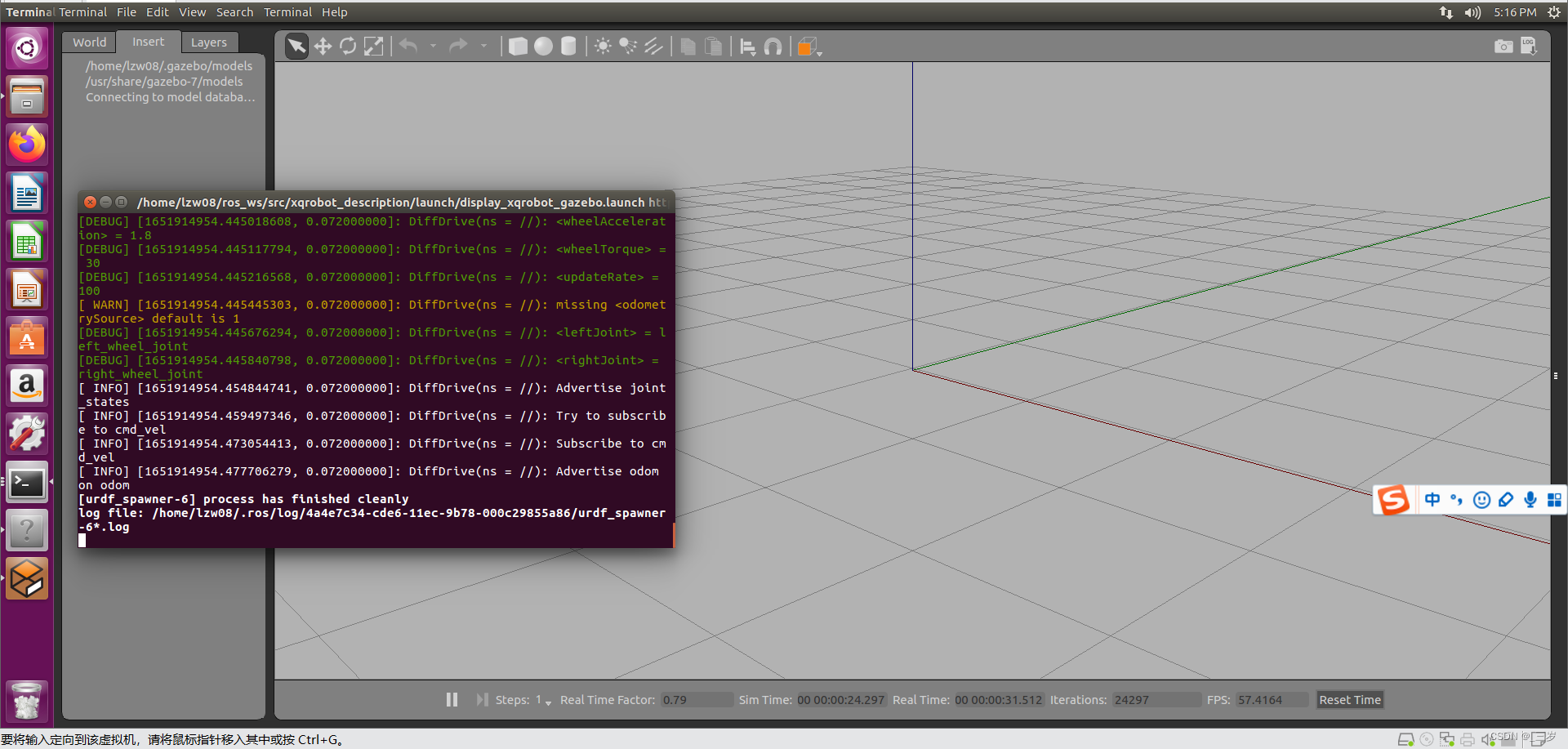
lzw08@ubuntu:~/ros_ws$ roslaunch xqrobot_description display_xqrobot_gazebo.launch
会发现一个黄色的窗口一闪而过,并出现下图所示的错误:

解决方法:
先把刚才那个出现错误的终端停了(Ctrl+C),注意不是关闭!
lzw08@ubuntu:~$ export SVGA_VGPU10=0
lzw08@ubuntu:~$ roslaunch xqrobot_description display_xqrobot_gazebo.launch
这样就可以运行了。
但是界面却空空如也,因为“insert”选项卡 下缺了东西。
解决方法:
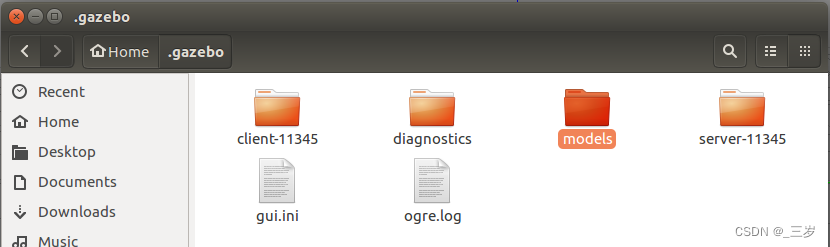
去学习通这门课的资料里下载model.tar.gz这个压缩包。

或者通过百度网盘分享的链接下载 → model.tar.gz (提取码:rlew)
下载完成之后解压缩,然后将model文件夹复制,粘贴到Home目录的.gazebo文件夹内。(.gazebo是隐藏文件夹,在Home目录下使用快捷键Ctrl+H即可显示隐藏文件)

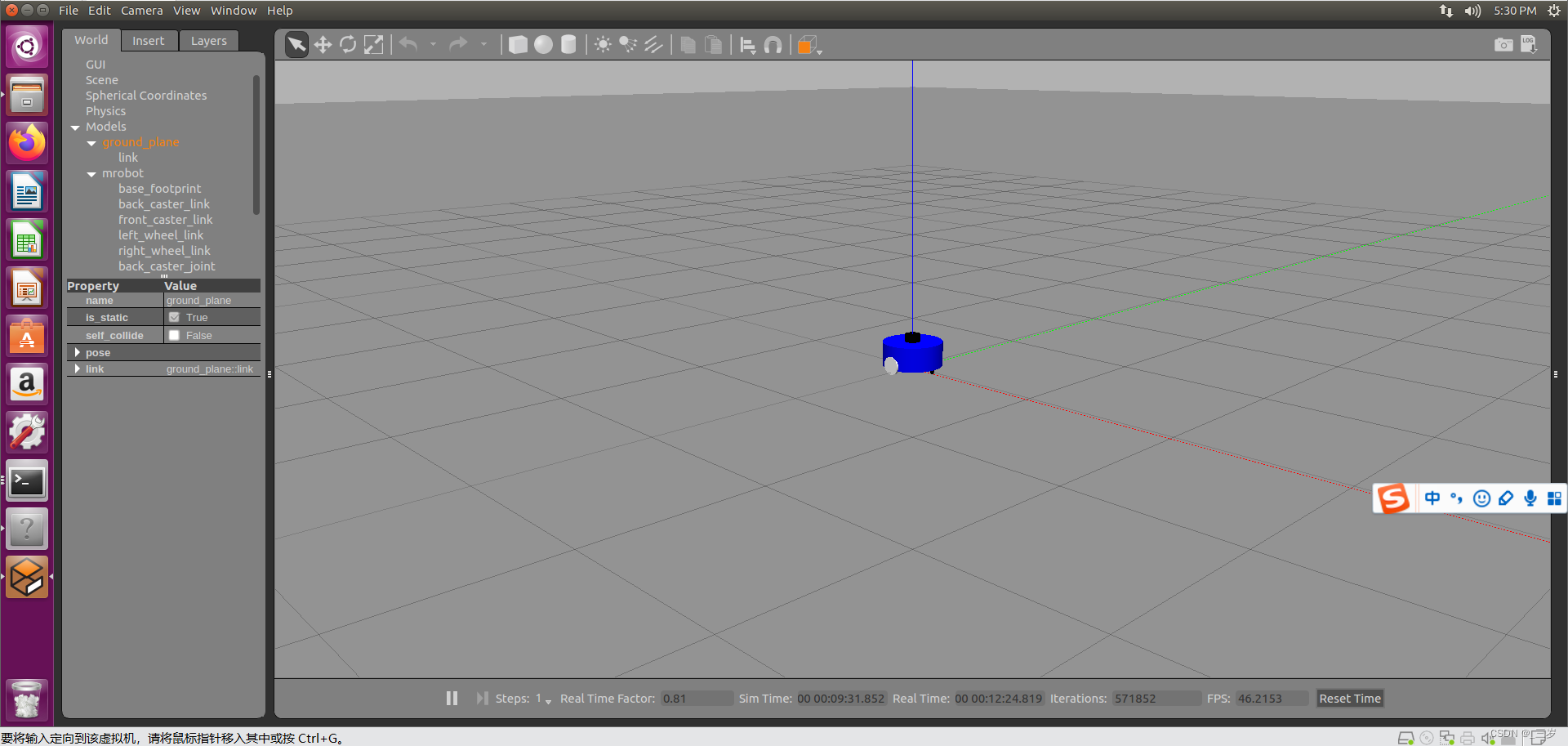
模型正常显示的效果:
6. rviz
打开一个新的终端,输入rviz,回车。
参数更改:
(TF有没有都可以,没有的话模型那里就不会显示由红绿蓝三条线构成的坐标系,如果你觉得有坐标系比较好看那就加上去)
- Fixed Frame选择“odom”。
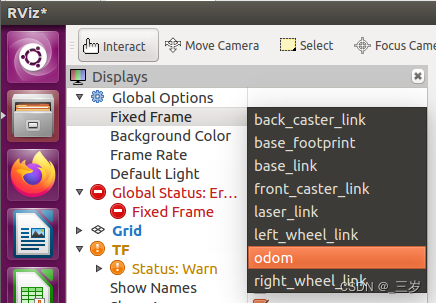
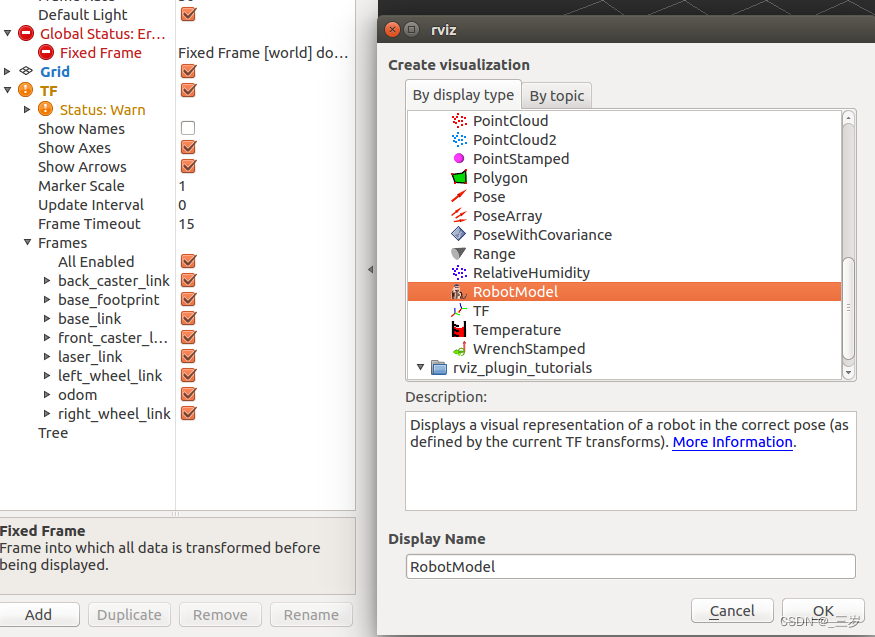
- 点击“Add”,添加“RobotModel”。
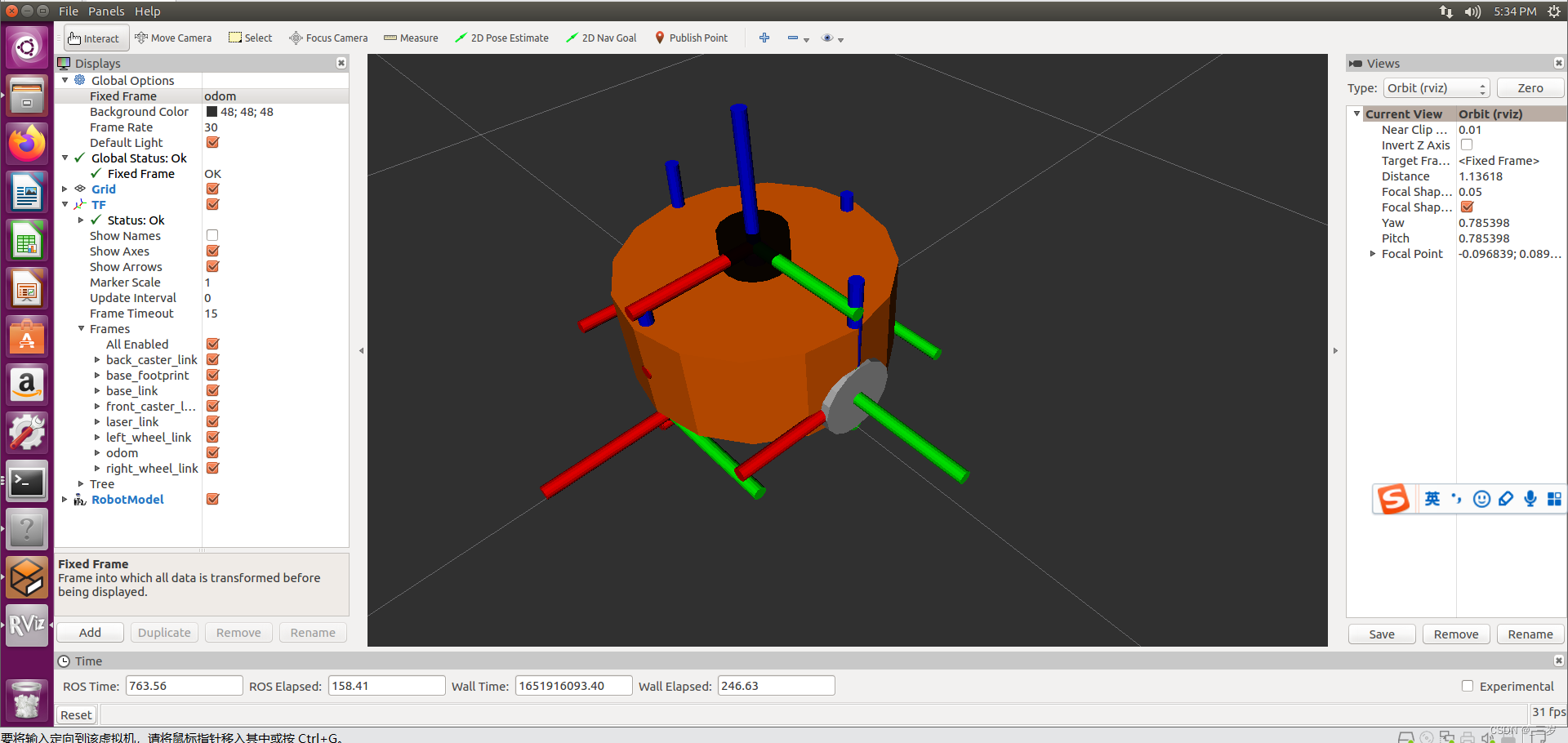
显示效果:
7. 开源键盘移动节点
老师已经写好一个利用键盘移动上面生成的那个机器人的节点,若想了解具体内容,复制下列链接到浏览器中粘贴并进入。
https://gitee.com/hanzq03/xqrobot.git
然后打开一个新的终端进入工作空间的src目录,运行命令。
lzw08@ubuntu:~$ cd ros_ws/src/
lzw08@ubuntu:~/ros_ws/src$ git clone https:
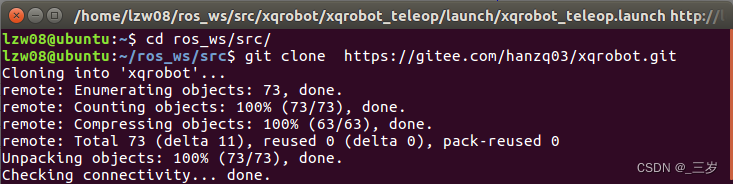
此时你会发现工作空间的src目录下多了一个名为“xqrobot”的功能包。
点进去xqrobot,把里面那个xqrobot_teleop的文件夹复制/剪切出来,然后xqrobot文件夹就可以丢弃到回收站了。
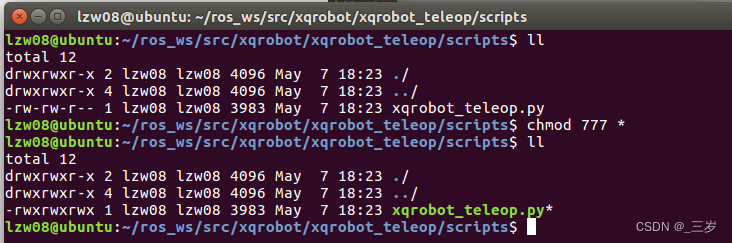
进入xqrobot_teleop→scripts,右击空白处,选择“Open in Terminal”。
然后将xqrobot_teleop.py的权限更改为可读可写可执行。
8. 运行键盘移动节点移动机器人
lzw08@ubuntu:~/ros_ws$ source devel/setup.bash
lzw08@ubuntu:~/ros_ws$ roslaunch xqrobot_teleop xqrobot_teleop.launch
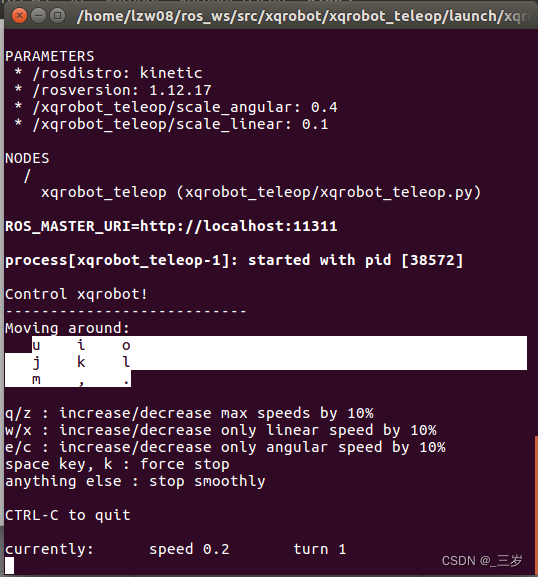
与移动小海龟机器人类似,此节点可使用键盘中的u,i, o,j,k,l,m,逗号,句号移动或者旋转机器人。
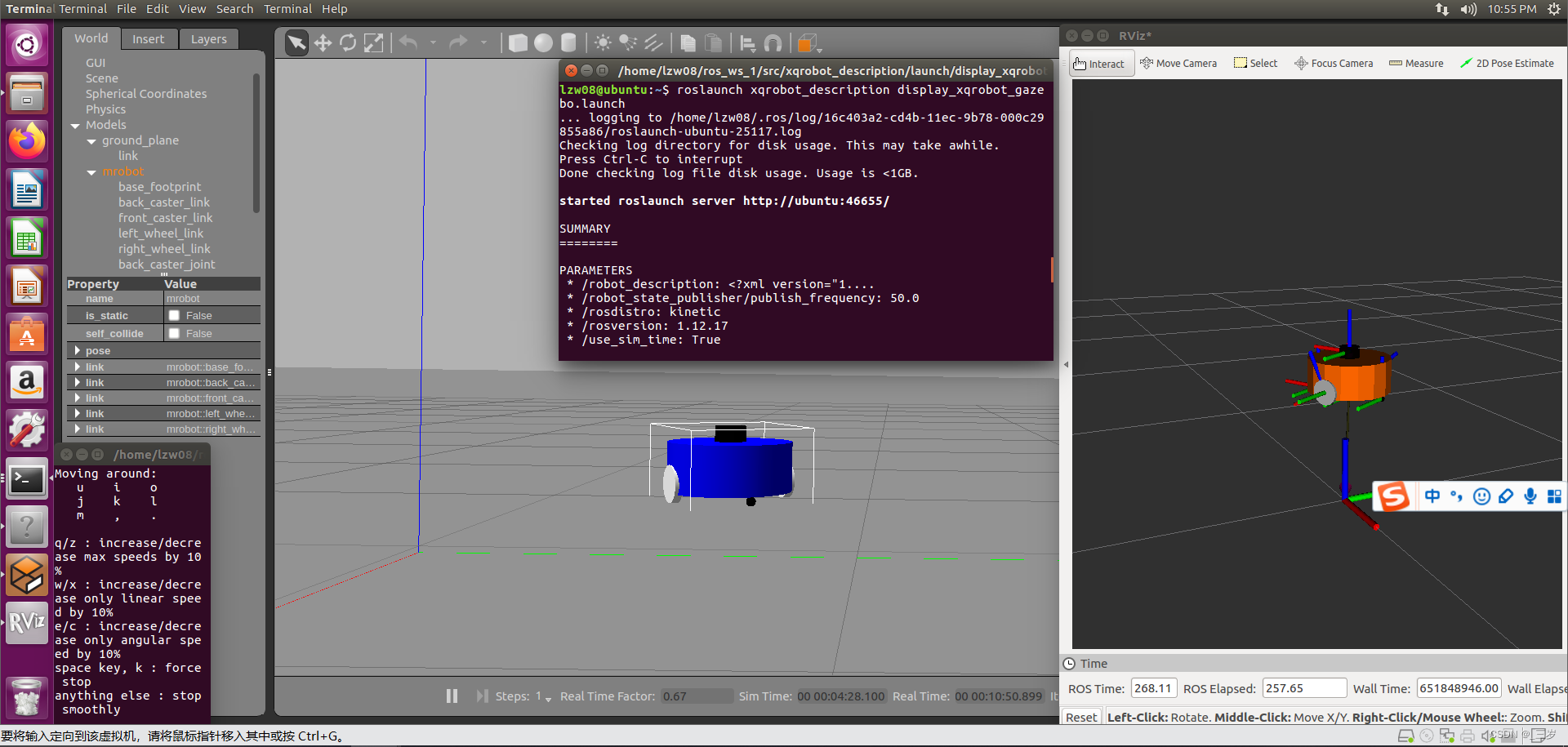
9. 最终效果
把rviz运行起来,最终效果如下图所示:
下期见下期见
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)