目录
DS18B20特性
内部存储器表
ROM指令表
RAM指令表
DS18B20暂存器表
单个DS18B20温度转换过程
温度读取及计算
配置寄存器(分辨率)
读写时序
复位及存在检测
写时序
读时序
程序实现
DS18B20特性
| 供电电压 | 3.0V~5.5V |
| 单线接口 | DS18B20 紧需一根总线与MCU进行双向通讯 |
| 多点组网 | 多个DS18B20可以并联在一条总线上,实现多点测温 |
| 硬件简单 | 不需要外围电路,因为OD结构故要接上拉电阻 |
| 测温范围 | -55~+125°C,在 -10~+85°C时精度为 ±0.5°C |
| 分辨率 | 9~12位 ,对应的分辨温度为 0.5°C、0.25°C、0.125°C、0.0625°C |
| 负压特征 | 正负极反接时芯片会发热,但不会被烧毁 |
内部存储器表
ROM指令表
| 指令 | 代码 | 功能 |
| 读ROM | 33H | 读DS18B20温度传感器ROM种的编码 |
| 匹配ROM | 55H | 发出此命令后,接着发出64位ROM编码,访问单总线上与该编码相对应的DS18B20使之作出响应,为下一步对该DS18B20的读写准备 |
| 搜索 ROM | F0H | 用于确定挂接在同一总线上的DS18B20的个数和识别64位ROM地址,为操作各器件做好准备 |
| 跳过ROM | CCH | 忽略64位ROM地址,直接向DS18B20发温度转换命令,适用于单个DS18B20工作 |
| 告警搜索 | ECH | 执行后只有温度超过设定值上限或下限的设别才做出响应 |
RAM指令表
| 指令 | 代码 | 功能 |
| 温度转换 | 44H | 启动DS18B20进行温度转换,12位转换时最长位750ms(9位为93.75ms)结果存入内部9字节RAM |
| 读暂存器 | BEH | 读内部RAM中9字节的内容 |
| 写暂存器 | 4EH | 发出向内部RAM的3、4字节写上、下限温度数据命令,紧跟该命令之后,是传送两字节的数据 |
| 复制暂存器 | 48H | 将RAM中3,4字节的内容复制到EEPROM |
| 重调EEPROM | B8H | 将EEPROM中内容恢复到RAM中的3,4字节 |
| 读供电方式 | B4H | 读DS18B20的供电模式。寄生供电时 DS18B20发送 "0",外接电源供电DS18B20发送"1" |
DS18B20暂存器表
| 寄存器内容 | 字节地址 |
| 温度值低位(LS Byte) | 0 |
| 温度值高位(MS Byte) | 1 |
| 高温限值 (TH) | 2 |
| 低温限值 (TL) | 3 |
| 配置寄存器 | 4 |
| 保留 | 5 |
| 保留 | 6 |
| 保留 | 7 |
| CRC校验值 | 8 |
单个DS18B20温度转换过程
- 复位
- 发CCH(跳过ROM)
- 发44H (温度转换)
- 复位
- 发CCH(跳过ROM)
- 发BEH (读暂存器)
- 读温度值低位
- 读温度值高位
温度读取及计算

- 温度>0时:高5位为 0,测到的数值乘0.0625得实际温度
- 温度 <0时:高5位为 1,测到的数值取反加1再乘0.0625得实际温度
注:上电复位后温度默认值是85°C
配置寄存器(分辨率)
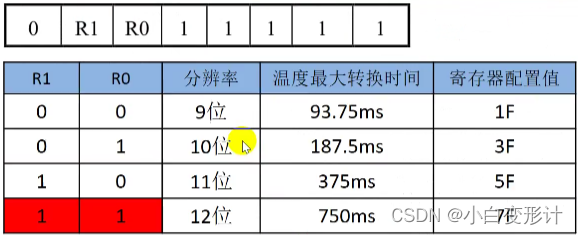

注:默认为12位分辨率
读写时序
复位及存在检测

在初始化序列期间,总线控制器拉低总线并保持 480us 以发出(TX)一个复位脉 冲,然后释放总线,进入接收状态(RX)。单总线由4.7K 上拉电阻拉到高电平。当 DS18B20 探测到 I/O 引脚上的上升沿后,等待 15-60us,然后发出一个由 60-240us 低电平信号构成的存在脉冲。
写时序

总线控制器通过写 1 时序写逻辑 1 到 DS18B20,写 0 时序写逻辑 0 到 DS18B20。所有写时序必须最少持续 60us,包括 两个写周期之间至少 1us 的恢复时间。当总线控制器把数据线从逻辑高电平拉到 低电平的时候,写时序开始
读时序

所有读时序必须最少 60us,包括两个读周期间至少 1us 的恢复时间。当总线控制 器把数据线从高电平拉到低电平时,读时序开始,数据线必须至少保持 1us,然 后总线被释放。在总线控制器发出读时序后,DS18B20 通过拉高或拉 低总线上来传输 1 或 0。当传输逻辑 0 结束后,总线将被释放,通过上拉电阻回 到上升沿状态。从 DS18B20 输出的数据在读时序的下降沿出现后 15us 内有效。
程序实现
void Delay_us(uchar us)//进一次约6.5us
{
while(us--);
}
bit ds_init()
{
bit i;
DS = 1;
_nop_();
DS = 0;
Delay_us(75); //6.5*75>480us
DS = 1; //释放总线
Delay_us(4); //15~16us
i = DS;
Delay_us(20); //60~240us
DS = 1;
_nop_();
return (i);
}
void write_byte(uchar dat)
{
uchar i;
for(i=0;i<8;i++)
{
DS = 0;
_nop_();//5us
DS = dat & 0x01;//判断写0还是写1
Delay_us(10);//>60us
DS = 1; //释放总线
_nop_();
dat >>= 1;//数据右移
}
}
uchar read_byte()
{
uchar i, j, dat;
for(i=0;i<8;i++)
{
DS = 0;
_nop_();//5us
DS = 1;
_nop_();//5us
j = DS;//先读低位
Delay_us(10);//>60us
DS = 1;
_nop_();
dat = (j<<7)|(dat>>1);//得到的数先移到最高位,dat再右移一位
}
return (dat);
}
void main()
{
uint i;
uchar L, M;
while(1)
{
ds_init();//初始化
write_byte(0xcc);//跳过ROM
write_byte(0x44);//温度转换
ds_init();//初始化
write_byte(0xcc);//跳过ROM
write_byte(0xbe);//读寄存器
L = read_byte();//读低八位
M = read_byte();//读高八位
i = M;
i <<= 8;//高八位左移
i |= L;//与低相与八位
if(i&0XF800==0XF800)//判断高五位是否为1,为1为负值
{
i=~i+1;//如果为 1 ,则取反 i 再加 1
}
i=i*0.0625;
Display(i);
}
}
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)