目录
一、动捕软件安装
二、数据录制、导入与导出
(一)创建 Markerset
(二)数据采集
(三)数据导入
(四)数据导出
三、插件安装与 MotionBuilder 设置
(一)插件安装
(二)MotionBuilder 设置(实时播放模式)
(三)MotionBuilder 设置(后处理下实时模式)
(四)MotionBuilder 设置(数据导入模式)
使用设备:从仔动作捕捉套装(NOKOV度量)
软件:CONG
一、动捕软件安装
1.在操作系统为 Windows 系统,且位数为 64 位的电脑上,以鼠标右键点击“以管理员身份运行”的方式,运行“CONG 1.1.0.2724 Installer.exe”文件(如图 1),直接点击安装即可,注意请勿更改安装路径。安装完毕后,桌面上会出现软件图标(如图 2);
图 1
图 2
二、数据录制、导入与导出
(一)创建 Markerset
1.在电脑上插入灰色的软件加密狗;
2.鼠标右键桌面上的“Cong”图标,选择“以管理员身份运行”,打开软件,连接镜头,点击播放;
3.模特按 41 点模型贴好反光点之后站在场地中间,面朝 Z 轴正方向,手臂和 X 轴平行,以 T-Pose 姿态站立,观察左下角数字是不是 41(如图 3);
图 3
4.确认软件处于播放状态,点击软件界面上方的“冻结帧”按钮,将 3D 视图冻结(如图4),成功冻结后该按钮会显示“解除冻结”(如图 5);
图 4
图 5
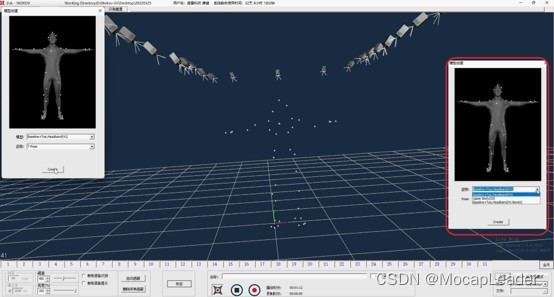
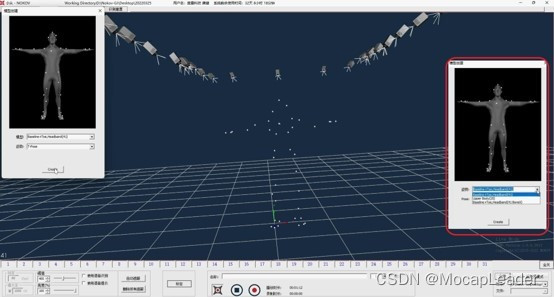
5. 冻 结 帧 数 后 , 界 面 右 击 选 择 Create body , 模 型 栏 按 照 图 6 红 圈 处“Baseline+Toe,Headband(41)”即可,姿势选择“T-Pose”,可以旋转滑轮观看贴点位置,确认实际贴点与动画一致,然后点击 create 进行快速创建人体(如图 6);
图 6
6.创建后的人体如图 7 所示
图 7
(二)数据采集
1.采集数据前,需确保软件已加载配置文件,可通过“文件 –加载标定文件” 选项进行加载,或者通过标定生成一个新的配置文件;
2.模特贴好反光标识点,进入场地内;
3.在软件界面下方的“名称”处输入需要采集的数据文件名,文件名避免中文或和特殊符号,确认后点击回车(如图8);
图 8
4. 确认采集数据文件名后,确认模特站在场地中间,面朝 Z 轴正方向,手臂和 X轴平行,以T-Pose姿态站立后点击下方的红色录制按钮
图 9
5. 录制一组数据后,“Name”输入框右侧的#符号后的数字会变为 2,表示即将录制是该文件名的第二组数据,在文件名不变的情况下,每录制一组数据后,该数字均会递进(如图 10、11);
图 10
图 11
6. 假如第二组数据(#2)录制时有问题,或出于其他原因,想重新录制该组数据,即将#后的数字更改为2,同时勾选右侧的“覆盖”,点击录制按钮,即可重新进行录制(如 图 12),对其他组数据也可一样操作;
图 12
(三)数据导入
1. 点击 CONG 软件界面右下角的“后处理模式”按钮,进入后处理界面(如图 13);
图 13
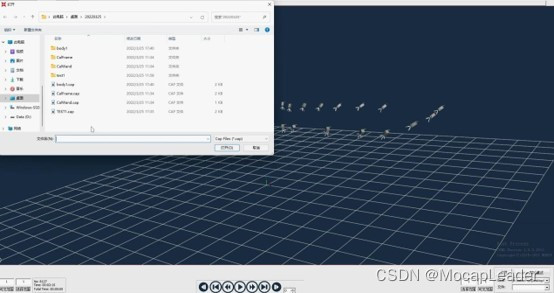
2.点击“文件”,选择“加载动捕数据”导入捕捉好的后缀名为.cap的数据文件(如图 14);
图 14
(四)数据导出
1.在右下角选择“文件 -> 导出 FBX 文件”,选择到出 FBX 文件可以一键导出(如图15、16)
图 15
图 16
三、插件安装与 MotionBuilder 设置
(一)插件安装
1.将插件安装包解压缩,双击解压缩后的插件,把插件安装在 MotionBuilder 目录之中。完成之后,点击 Finish,插件就安装进来了。插件安装路径以自身 MotionBuilder 根目录位置而定(如图 17);
图 17
(二)MotionBuilder 设置(实时播放模式)
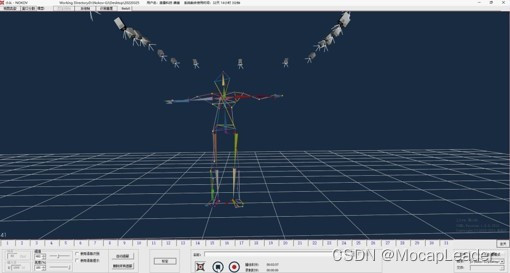
1.打开 CONG,加载一个标定文件, 连接镜头并开始播放。模特按 41 点模型贴好反光点之后站在场地中间,面朝 Z 轴正方向,手臂和 X 轴平行,以 T-Pose 姿态站立,观察左下角数字是不是 41(如图 18);
图 18
2.确认为 41 点后冻结帧,界面右击选择 Create body,模型栏按照图 6 红圈处选“Baseline+Toe,Headband(41)”即可,姿势选择“T-Pose”,可以旋转滑轮观看贴 点位置,确认实际贴点与动画一致,然后点击 create 进行快速创建人体(如图 19);
图 19
3.创建后解除冻结,模特如图 20 所示;
图 20
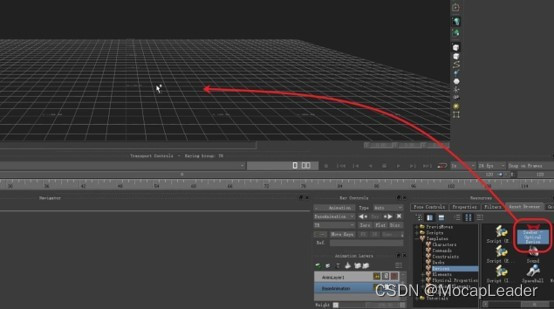
4.打开 MotionBuilder2018,点击“Resources—Asset Browser—Devices“(如图21),找到其中的” Seeker - Optical Device“,并将其拖入 Viewer 视图中(如图 22)。
图 21
图 22
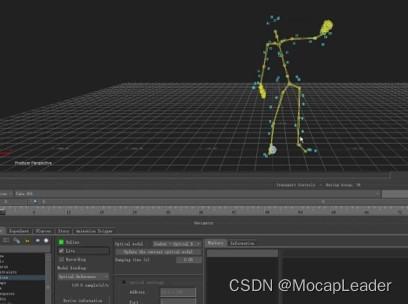
5.点击界面下方点击 Online 按钮(图 23),下方的 Live 旁的会打上√,此时成功的状态应当如图 24 注 1。此时模特在场地中间以 T-Pose 姿势面朝 Z 轴,手臂与 X 轴平行站立。在”Optical model“下方点击”Generate a new optical model“(图 24 注 2)。
图 23
图 24
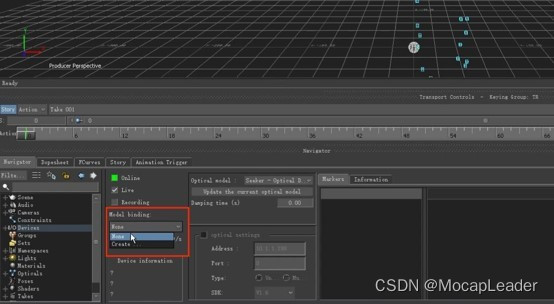
6.点击”Model binding“,选择其中的”Create”(图 25),选择完“Create”之后框内文字会变成“Optical:Reference”,此时在 Live 处取消勾再勾选上就会看到骨架(图 26)。
图 25
图 26
7.此时模特以 T-pose 的姿势站立,再回到 Cong 暂停播放(如图 27)。
图 27
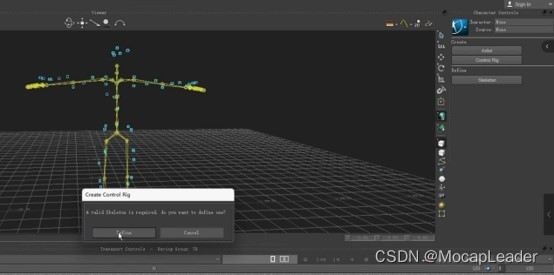
8.回到 MotionBuilder 里,选择右边窗口的“Define—Skeleton”,弹出的窗口再点击“Define”(如图 28),再点击骨骼上节点,在视图右下角会显示骨骼的名称,选择右侧的对应节点进行鼠标右键,选择“Assign Selected Bone”绑定(如图 29),选择右侧人物骨骼节点图的左上方锁定按钮(如图 30 红圈),弹窗点击“Biped”完成角色化(如图31)。
图 28
图 29
图 30
图 31
9.在 MotionBuilder 中导入要被驱动的模型,对它进行同第 8 步的角色化处理。
10.在“Character Controls”窗口,Character 栏选择骨骼角色,Source 栏选择导入的模型角色(如图 32)。切回 Cong 软件点击播放,让场地中待命的模特运动起来,就可以看到 MotionBuilder 中模型被驱动起来(如图 33)
图 32
图 33
(三)MotionBuilder 设置(后处理下实时模式)
1.打开 CONG,进入到后处理模式,选择准备好的动捕数据,第一帧需以 T-pose 姿势面朝 Z 轴正方向,手臂与 X 轴平行;(如图 34)
图 34
2.打开 MotionBuilder2018,点击“Resources—Asset Browser—Devices“(如图 35),找到其中的“Seeker - Optical Device”,并将其拖入 Viewer 视图中(如图 36)。
图 35
图 36
2.点击界面下方“Navigator—I/O devices—I/O Seeker - Optical Device“中的SDK 的版本 确保为“V2.0 ”(图 37 注 2),再 按 Online 按钮( 图 37 注 1 ),使 其进入Live 状态,此时成功的状态应当如图 38 注。在”Optical model“下方点击”Generate a new optical model“(图 38 注 2)。
图 37
图 38
3.此时再到 Cong 软件中的运动人体 Markerset,MotionBuilder 中的模型就会被驱动, 进行同步运动,点击”Model binding“,选择其中的”Create”(图 39),选择完“Create” 之后框内文字会变成“Optical:Reference”,此时在 Live 处取消勾再勾选上就会看到骨架(图 40)。
图 39
图 40
4.此时再回到 Cong 暂停播放,拖动到第一帧,以 T-pose 的姿势站立(如图 41)。
图 41
5.回到 MotionBuilder 里,选择右边窗口的“Define—Skeleton”,弹出的窗口再点击“Define”(如图 42),再点击骨骼上节点,在视图右下角会显示骨骼的名称,选择右侧的对应节点进行鼠标右键,选择“Assign Selected Bone”绑定(如图 43),选择右侧人物骨骼节点图的左上方锁定按钮(如图 44 红圈),弹窗点击“Biped”完成角色化(如图45)。
图 42
图 43
图 44
图 45
6.在 MotionBuilder 中导入要被驱动的模型,对它进行同第 4 步的角色化处理。
7.在 “Character Controls ”窗口 ,Character 栏选 择骨 骼角 色,Source 栏选 择导入的模型角色(如图 46)。回到 Cong 软件继续播放,人体 Markerset 运动起来,就可以看到 MotionBuilder 中模型被驱动起来(如图 47)。
图 46
图 47
(四)MotionBuilder 设置(数据导入模式)
1.根据第二章一、二、四小节的操作,导出 FBX 文件;
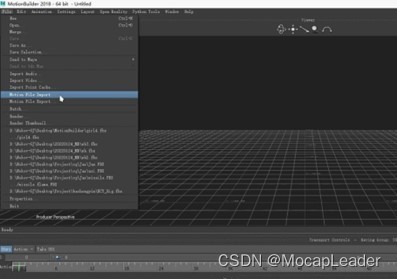
2.打开 MotionBuilder,点击左上角的“file”,选择其中的“Motion File Inport”,选择先前 Cong 里导出的 FBX 文件(如图 48)
图 48
3.在导入 FBX 文件弹出的窗口,点击“Inprot”导入(如图 49)
图 49
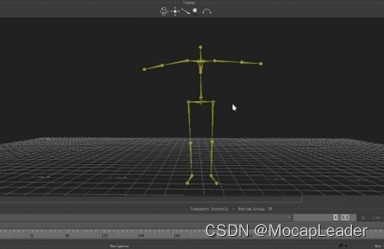
4.此时导入成功应当如下图所示(如图 50);
图 50
5.选择右边窗口的“Define—Skeleton”,弹出的窗口再点击“Define”(如图 51)
图 51
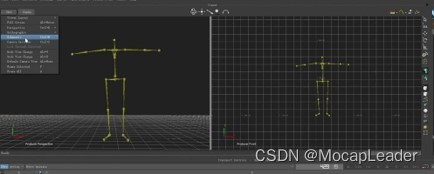
6.切换视图到双视图(如图 52)
图 52
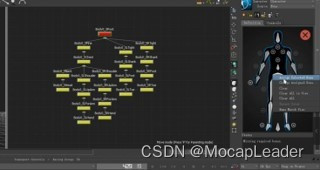
7.选择右边窗口,然后在“view”中选择“Schematio”(如图 53)来显示骨骼树状图(如图 54)
图 53
图 54
8.在右侧窗口点击鼠标右键,把“Auto Arrange”自动排列勾选上(如图 55)
图 55
9.在右边视图的树状图上选择骨骼绑定到右边对应的骨骼节点,点击鼠标右键选择第一 个“Assign Selected Bone”(如图 56)
图 56
10.重复上一步的操作直至骨骼绑定完成,选择右侧人物骨骼节点图的左上方锁定按钮(如图 57 红圈),弹窗点击“Biped”完成角色化(如图 58)。
图 57
图 58
11.在 MotionBuilder 中导入要被驱动的模型,对它进行同第 4 步的角色化处理。
12.在右侧“Character Controls”窗口,Character 栏选择骨骼角色,Source 栏选择导入的模型角色(如图 59)。然后播放这组数据,就可以看到模型被驱动起来(如图 60)。
图 59
图 60
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)