导语:这一周的工作先是完成了度量系统Nokov的标定,然后对机械臂自身的编码器得到的坐标值与动作捕捉系统Nokov测得的坐标值进行了比较,来观察二者之间的误差。在这个过程中我对Nokov软件Seeker的使用有了基本掌握,最重要的是让我对机械臂有了更深的理解,特此在这记录。
一. 度量系统Nokov的标定
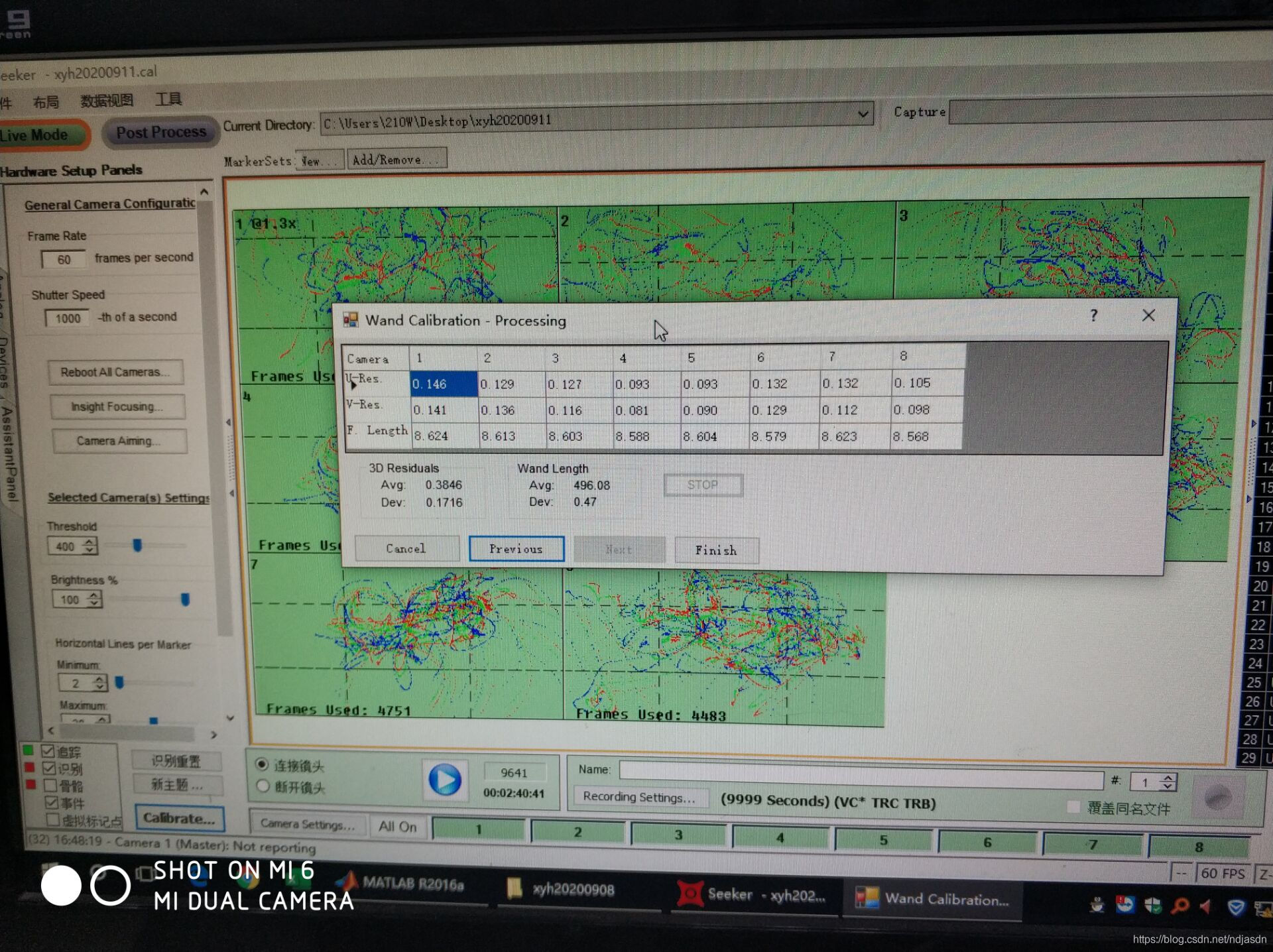
在进行坐标值比较之前,我已经对度量系统进行了一次标定,标定效果很好。
真实值496.05,标定值496.08 (单位mm)
盲区说明:
标定完成之后,Nokov对于标定空间内的点的测量是很准确的,但是如果出了标定空间,摄像头是捕捉不到的,所以它只能对标定空间内进行测量。( 且经过测试,越靠近盲区,测量值越不准确。)
二. 机械臂自身的编码器得到的坐标与动作捕捉系统测得得坐标值比较
在进行上面标定之后,如果只是用度量系统单独测量坐标的话是没问题的,但如果需要在同一点下将机械臂自身的编码器值和Nokov的值进行比较的话,那么还需要注意一个问题,即机械臂本体的基坐标系和度量系统标定的原点坐标系之间的关系。简单的处理是:让他们二者原点坐标系方位一致,只有平移变换关系。
设机械臂末端坐标系为C,机械臂基坐标系为A,视觉捕捉系统标定的原点坐标系为B。那么机械臂末端位姿在机械臂基坐标系下的表示为
C
A
T
_{C}^{A}T
CAT ,机械臂末端位姿在视觉捕捉系统原点坐标系的表示为
C
B
T
_{C}^{B}T
CBT ,视觉捕捉系统原点坐标系在机械臂基坐标系表示方法为
B
A
T
_{B}^{A}T
BAT ,那么可得误差关系:
e
r
r
o
r
=
C
A
T
−
B
A
T
×
C
B
T
error\,\,=\,\,_{C}^{A}T\,\,-\,\,_{B}^{A}T\times _{C}^{B}T
error=CAT−BAT×CBT
例如,对机械臂的零位点进行测量比较,
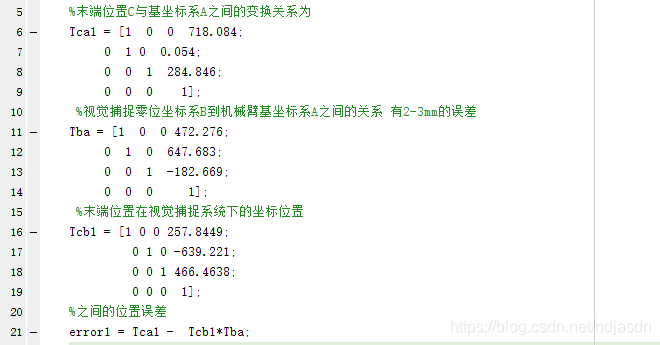
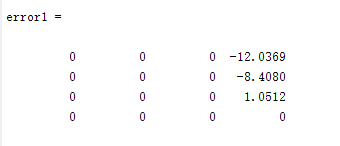
可得误差(单位:mm):
误差来源分析:
- 机械臂编码器测得的点是末端执行器的尖点,而视觉捕捉系统则需要在机械臂末端处贴上反光小球,小球直径约1.5cm,故存在小球直径大小的误差,这种情况下设最大允许误差为15mm。
- 得到
B
A
T
_{B}^{A}T
BAT 的方法是让机械臂的末端点到达视觉捕捉系统的原点坐标系,通过在 Live Mode 模式下进行观察,二者坐标系基本重合即可,在示教器上读出此时的位置信息,作为平移变换矩阵,经过测量,这种误差存在2-3mm的误差。
- 在进行视觉捕捉系统标定的时候,需要让视觉捕捉系统的原点坐标系与机械臂基坐标系xyz方位一致,即使我是沿着地板线进行坐标系的标定,但仍可能存在细微误差,故认为这种方法存在1-2mm的误差。
对机械臂的更深认识:
注:这里针对我使用的工业机械臂CRP1410,不同机器人坐标系方向和原点建立是不同的。
基坐标系:基坐标系不是在底座面上,而是在底座中心的上方,与第二关节中心处平行。
直角坐标系:之前认为监视直角坐标下的坐标值是机械臂末端的点的值,但发现不是,每种机器人类型对应的直角坐标方向不同,对应的直角坐标原点位置也不同。CRP直角坐标系下测的是第六关节法兰盘的中心处。
工具坐标系:工具坐标系0号与直角坐标系相同,工具坐标系1号是测得末端执行器的尖点并延长15mm的焊枪点。如果我们要观察末端执行器上的点应该重新进行标定工具坐标系。(3号也是直角坐标系)
调试后文:
1. 在重新标定末端尖点带小球的工具坐标系T5后:
末端尖点工具坐标系是4号,尖点再带个小球半径的工具坐标系是5号,现在机械臂测得是末端小球球心的位姿,Nokov测量的也是末端小球球心的位姿,两者按道理来说没有很大的误差,但测量后比较两者误差仍比较大,暂未发现原因。
2. 在求到了机械臂基坐标系在视觉捕捉系统下的位置之后:
求到了基坐标系在视觉捕捉系统坐标系下的位置,随后继续比较两者误差仍然比较大,后续找到了原因,发现视觉标定坐标系和机械臂基坐标系存在位姿变换,不只是简单的平移变换关系。
3. 后续在动捕系统标定原点上建立机械臂的用户坐标系后:
对动捕系统重新进行了标定,对机械臂也重新进行了用户坐标的建立,用户坐标系为10号,发现沿着用户坐标系某一轴走直线时,其他两轴在动捕坐标系下误差存在为1.3mm左右。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)