在几乎所有的机器上,多字节对象都被存储为连续的字节序列。例如在C语言中,一个类型为int的变量x地址为0x100,那么其对应地址表达式&x的值为0x100。且x的四个字节将被存储在存储器的0x100, 0x101, 0x102, 0x103位置。
而存储地址内的排列则有两个通用规则。一个多位的整数将按照其存储地址的最低或最高字节排列。如果最低有效字节在最高有效字节的前面,则称小端序;反之则称大端序。在网络应用中,字节序是一个必须被考虑的因素,因为不同机器类型可能采用不同标准的字节序,所以均按照网络标准转化。
例如假设上述变量x类型为int,位于地址0x100处,它的十六进制为0x01234567,地址范围为0x100~0x103字节,其内部排列顺序依赖于机器的类型。大端法从首位开始将是:0x100: 01, 0x101: 23,..。而小端法将是:0x100: 67, 0x101: 45,..
对于单一的字节(a byte),大部分处理器以相同的顺序处理位元(bit),因此单字节的存放方法和传输方式一般相同。
对于多字节数据,如整数(32位机中一般占4字节),在不同的处理器的存放方式主要有两种,以内存中0x0A0B0C0D的存放方式为例,分别有以下几种方式:
-
注: 0x前缀代表十六进制。
大端序
大端序(英:big-endian)或称大尾序。
| 地址增长方向 → |
| ... | 0x0A | 0x0B | 0x0C | 0x0D | ... |
示例中,最高位字节是0x0A 存储在最低的内存地址处。下一个字节0x0B存在后面的地址处。正类似于十六进制字节从左到右的阅读顺序。
| 地址增长方向 → |
| ... | 0x0A0B | 0x0C0D | ... |
最高的16bit单元0x0A0B存储在低位。
小端序
小端序(英:little-endian)或称小尾序。
| 地址增长方向 → |
| ... | 0x0D | 0x0C | 0x0B | 0x0A | ... |
最低位字节是0x0D 存储在最低的内存地址处。后面字节依次存在后面的地址处。
| 地址增长方向 → |
| ... | 0x0C0D | 0x0A0B | ... |
最低的16bit单元0x0D0C存储在低位。
当更改地址的增长方向,使之由右至左时,表格更具有可阅读性。
| ← 地址增长方向 |
| ... | 0x0A | 0x0B | 0x0C | 0x0D | ... |
最低有效位(LSB)是0x0D 存储在最低的内存地址处。后面字节依次存在后面的地址处。
| ← 地址增长方向 |
| ... | 0x0A0B | 0x0C0D | ... |
最低的16bit单元0x0C0D存储在低位。
混合序
混合序(英:middle-endian)具有更复杂的顺序。以PDP-11为例,0x0A0B0C0D被存储为:
| 地址增长方向 → |
| ... | 0x0B | 0x0A | 0x0D | 0x0C | ... |
可以看作最高的16bit位和低位以大端序存储,但16bit内部以小端存储。
参考地址:
http://zh.wikipedia.org/wiki/%E5%AD%97%E8%8A%82%E5%BA%8F
存储模式:大端模式和小端模式。
大端模式(Big_endian):字数据的高字节存储在低地址中,而字数据的低字节则存放在高地址中。
小端模式(Little_endian):字数据的高字节存储在高地址中,而字数据的低字节则存放在低地址中。
union型数据所占的空间等于其最大的成员所占的空间。对union型的成员的存取都是相对于该联合体基地址的偏移量为0处开始,也就是联合体的访问不论对哪个变量的存取都
是从union的首地址位置开始.
请写一个C函数,若处理器是Big_endian的,则返回0;若是Little_endian的,则返回1。
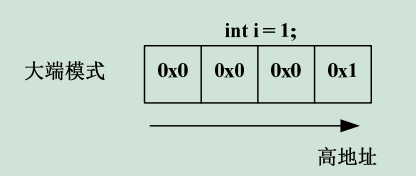
先分析一下,按照上面关于大小端模式的定义,假设int类型变量i被初始化为1。
以大端模式存储,其内存布局如下图:
以小端模式存储,其内存布局如下图:
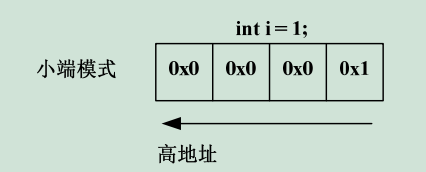
变量i占4个字节,但只有一个字节的值为1,另外三个字节的值都为0。如果取出低地址上的值为0,毫无疑问,这是大端模式;如果取出低地址上的值为1,毫无疑问,这是
小端模式
int checkSystem( )
{
union check
{
int i;
char ch;
}c;
c.i = 1;
return (c.ch ==1);
}
另外一种判断大端小端的方法
//判断程序如下:
#define BIG_ENDIAN 0
#define LITTLE_ENDIAN 1
int TestByteOrder(){
short int word = 0x0001;
char *byte = (char *) &word;
return (byte[0] ? LITTLE_ENDIAN : BIG_ENDIAN);
}
原文地址:
http://www.cricode.com/2392.html
- int checkSystem( )
- {
- union check
- {
- int i;
- char ch;
- }c;
- c.i = 1;
- return (c.ch ==1);
- }
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)