ubuntu 截图
#保存到图片文件夹
Print Screen #截取整个桌面
Alt + Print Screen #截取选中的窗口
Shift + Print Screen #自由选区
#复制到剪贴板
Ctrl + Print Screen #整个桌面
Ctrl + Alt + Print Screen #选中的窗口
Shift + Ctrl + Print Screen #自由选区
ubuntu 痕迹清除
rm -f -r /var/log/*
rm .bash_history
rm recently_used
ubuntu 磁盘挂载
1.查看Linux硬盘信息,分辨出要挂载的盘
sudo fdisk -l
2. 创建你要挂载的目录,如有现成的这一步省略
sudo mkdir /data
3. 挂载磁盘 /dev/sdb1
sudo mount /dev/sdb1 /data
4. 卸载磁盘
使用 umount命令 解除挂载关系
umount 设备名称 或者 umount 挂载目录
如:umount /dev/sdb1 or umount /data
修改中国时区
timedatectl set-timezone Asia/Shanghai
ubuntu查看文件和文件夹大小
文件大小:自己创建压缩文件,可以使用 ls -hl 查看文件大小 ll -h
文件夹大小:du -h --max-depth=1
scp传输文件的命令
一:scp常规的使用方式:
scp可以进行简单的远程复制文件的功能。它是一个在各个主机之间进行复制或文件传输的一个命令工具。它使用一种同ssh一样的安全机制来进行文件的传输。
注意:下面定义的远程计算机的主机域名是 192.168.1.104, 上传文件的路径是 /usr/local/nginx/html/webs 下面的文件;且 服务器的账号是 root, 那么密码需要自己输入自己的密码即可。
1. 从本地上传文件到远程计算机或服务器的命令如下:
先进入本地目录下,然后运行如下命令:
scp my_local_file.zip root@192.168.1.104:/usr/local/nginx/html/webs
2. 从远程主机复制文件到本地主机(下载)的命令如下:(假如远程文件是about.zip)
先进入本地目录下,然后运行如下命令:
scp root@192.168.1.104:/usr/local/nginx/html/webs/about.zip .
二: 多文件传输
2-1 从本地文件复制多个文件到远程主机(多个文件使用空格分隔开)
先进入本地目录下,然后运行如下命令:
scp index.css json.js root@192.168.1.104:/usr/local/nginx/html/webs
2-2 从远程主机复制多个文件到当前目录
先进入本地目录下,然后运行如下命令:
scp root@192.168.1.104:/usr/local/nginx/html/webs/\{index.css,json.js\} .
三:复制整个文件夹(使用r switch 并且指定目录)
3-1 从本地文件复制整个文件夹到远程主机上(文件夹假如是diff)
先进入本地目录下,然后运行如下命令:
scp -v -r diff root@192.168.1.104:/usr/local/nginx/html/webs
3-2 从远程主机复制整个文件夹到本地目录下(文件夹假如是diff)
先进入本地目录下,然后运行如下命令:
scp -r root@192.168.1.104:/usr/local/nginx/html/webs/diff .
四:在两个远程主机之间复制文件
scp也可以把文件从一个远程主机复制到另一个远程主机上。
如下命令:
scp root@192.168.1.104:/usr/local/nginx/html/webs/xx.txt root@192.168.1.105:/usr/local/nginx/html/webs/
五:使用压缩来加快传输
在文件传输的过程中,我们可以使用压缩文件来加快文件传输,我们可以使用 C选项来启用压缩功能,该文件在传输过程中被压缩,
在目的主机上被解压缩。
如下命令:
scp -vrC diff root@192.168.1.104:/usr/local/nginx/html/webs
实用工具软件安装
Notepad++ ubuntu安装
安装:
sudo add-apt-repository ppa:notepadqq-team/notepadqq
sudo apt-get update
sudo apt-get install notepadqq
卸载:
sudo apt-get remove notepadqq
sudo add-apt-repository --remove ppa:notepadqq-team/notepadqq
Meld 文件对比工具
直接 sudo apt-get install Meld
Wps 安装
在官网下载软件包
PDF 阅读器
福昕,直接在官网下载
终端分屏工具
直接 sudo apt-get install terminator(百度下具体英文名字,可能会拼错)
截图编辑工具
sudo apt install flameshot
上面安装的版本较低,不带有文字加入功能
wget https://github.com/lupoDharkael/flameshot/releases/download/v0.6.0/flameshot_0.6.0_bionic_x86_64.deb
sudo dpkg -i flameshot_0.6.0_bionic_x86_64.deb
查找
find / -name "*.a"|grep fmt 从根目录查找*.a并过滤fmt
包管理 apt-get
apt-cache show flameshot # 执行版本查看命令
sudo dpkg -i flameshot_0.6.0_bionic_x86_64.deb 下载包并进行安装
sudo dpkg -r flameshot 卸载deb安装的包
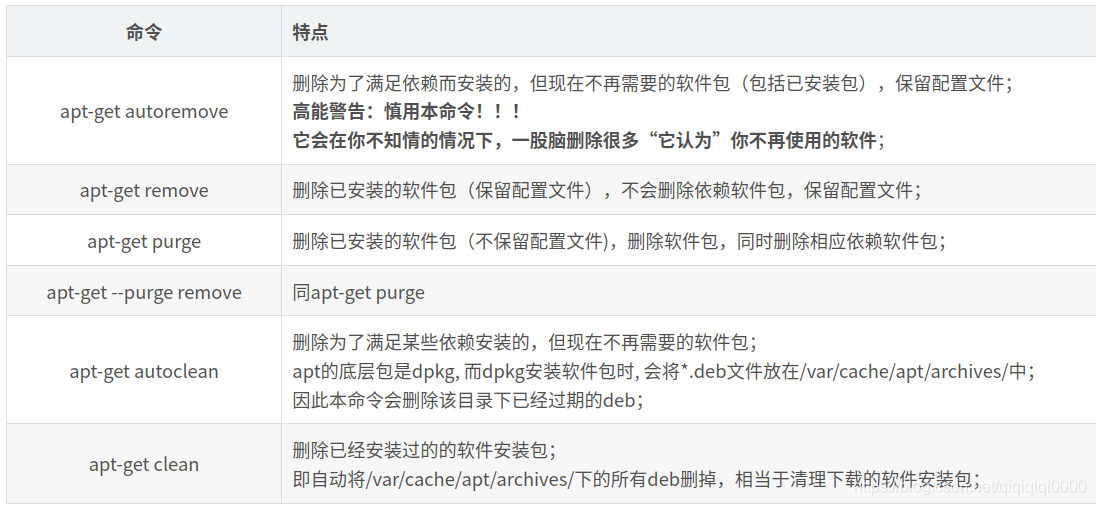
那么如何彻底卸载软件呢? 如下:
apt-get --purge remove <package> # 删除软件及其配置文件
apt-get autoremove <package> # 删除没用的依赖包
dpkg -l |grep ^rc|awk '{print $2}' |sudo xargs dpkg -P # 清理dpkg的列表中有“rc”状态的软件包
附录:dpkg简介
Ubuntu是基于Debian的Linux系统,而Debian系统的软件是使用APT和dpkg进行管理。dpkg是"Debian Packager"的简写,是一个底层的软件包管理工具。
可以输入dpkg -l来查看软件的状态,输入dpkg -P来卸载软件。因为dpkg --remove只是删除安装的文件,但不删除配置文件。而dpkg --purge则安装文件和配置文件都删除。
ubuntu 环境变量
打印并过滤环境变量 printenv | grep ROS
运行报找不到共享库
需要先确定库的环境变量是否添加
.bashrc 中添加:
export PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/opt/libs-x64/opencv-440/lib/pkgconfig/
export LD_LIBRARY_PATH=/opt/libs-x64/log4cpp/log4cpp-1.2.2/lib${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
按照同样的方式可以在 /etc/profile中添加,qt远程调试需要在/etc/profile中添加。
同样的程序在一台机器能运行在另一台运行不了的解决办法
在另一台机器中创建一模一样的路径,把程序放进去即可运行,环境变量要添加进去。
nomachine 卸载
sudo /usr/NX/scripts/setup/nxserver --uninstall
sudo rm -rf /usr/NX
nomachine 连不上也有可能是权限的问题。
安装:
/usr/NX/nxserver --install
黑屏解决办法:
sudo service gdm3 stop
sudo init 3
sudo /etc/NX/nxserver --restart
白屏解决办法:
打开/etc/gdm/custom.conf (ubuntu18.04也可能是gdm3)
去掉 #WaylandEnable=false的注释
使用命令systemctl restart gdm重启软件
/usr/NX/bin/nxserver --restart 重启软件
ubuntu 查看系统版本
lsb_release -a
ubuntu18 配置开机自启动
1. 查看是否有 /etc/rc.local这个文件,如果没有的话需要自己创建。
sudo vim /etc/rc.local
2.以下命令加入到里面
#!/bin/sh -e
#
# rc.local
#
# This script is executed at the end of each multiuser runlevel.
# Make sure that the script will "exit 0" on success or any other
# value on error.
#
# In order to enable or disable this script just change the execution
# bits.
#
# By default this script does nothing.
cd /home/renzqc
./start_ibus.sh
exit 0
3. /home/rezqc 下的 ./start_ibus.sh 内容为:
#!/bin/bash
export PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/opt/libs-x64/opencv-440/lib/pkgconfig/
export LD_LIBRARY_PATH=/opt/libs-x64/log4cpp/log4cpp-1.2.2/lib${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export LD_LIBRARY_PATH=/opt/libs-x64/pcap/pcap-1.9.0/lib${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export LD_LIBRARY_PATH=/opt/libs-x64/zeromq/zeromq-4.2.2/lib${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export LD_LIBRARY_PATH=/opt/libs-x64/protobuf/protobuf-3.5.0/lib${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export LD_LIBRARY_PATH=/opt/libs-x64/tensorflow/tensorflow1.15.3/lib${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export LD_LIBRARY_PATH=/opt/libs-x64/LivoxSDK/lib${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export LD_LIBRARY_PATH=/opt/libs-x64/boost/boost-1.63/lib${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export LD_LIBRARY_PATH=/opt/libs-x64/opencv/opencv440/lib${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export LD_LIBRARY_PATH=/opt/libs-x64/diagnosis_lib/lib${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export LD_LIBRARY_PATH=/opt/libs-x64/opencv/opencv-3.4.3/lib${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export LD_LIBRARY_PATH=/opt/libs-x64/x264/x264-20181107-2245/lib${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export LD_LIBRARY_PATH=/opt/libs-x64/glog/lib${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export LD_LIBRARY_PATH=/opt/libs-x64/pointpillars${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export LD_LIBRARY_PATH=/opt/libs-x64/tensorRt/lib${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export LD_LIBRARY_PATH=/opt/libs-x64/zip/zip-1.5.1/lib${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export LD_LIBRARY_PATH=/opt/libs-x64/uchardet/uchardet-0.0.5/lib${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export LD_LIBRARY_PATH=/opt/libs-x64/iconv/iconv-1.15/lib${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export LD_LIBRARY_PATH=/opt/libs-x64/ffmpeg/ffmpeg-4.1/lib${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export LD_LIBRARY_PATH=/opt/libs-x64/x264/x264-20181107-2245/lib${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
# start ptpd2
sudo ptpd2 -M -i enp5s0 &
# multi cast as 239.1.1.1
sudo route add -net 239.1.1.0 netmask 255.255.255.0 dev enp5s0
cd /home/yutong/perception/location/ibus_map/
#./ibus_map &> /dev/null &
cd /home/yutong/znc/
./ibus_decision &> /dev/null &
sleep 60
4. 修改权限:
chmod +x /etc/rc.local
ubuntu本地时间和网络时间同步
sudo ntpdate cn.pool.ntp.org
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)