(1)作用
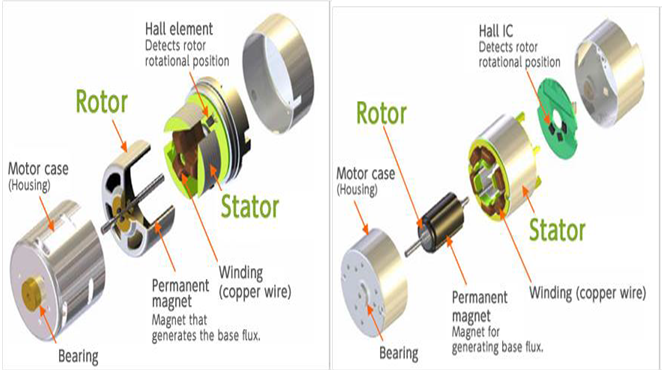
多旋翼的电机主要以无刷直流电机为主,将电能转换成机械能。无刷直流电机运转时靠电子电路换向(与有刷直流电机不同,无刷直流电机使用电子方式换向。要使BLDC转起来,必须要按照一定的顺序给定子通电,那么我们就需要知道转子的位置以便按照通电次序给相应的定子线圈通电。定子的位置是由嵌入到定子的霍尔传感器感知的。通常会安排3个霍尔传感器在转子的旋转路径周围。无论何时,只要转子的磁极掠过霍尔元件时,根据转子当前磁极的极性霍尔元件会输出对应的高或低电平,这样只要根据3个霍尔元件产生的电平的时序就可以判断当前转子的位置,并相应的对定子绕组进行通电),这样就极大减少了电火花对遥控无线电设备的干扰,也减小了噪音。它一头固定在机架力臂的电机座,一头固定螺旋桨,通过旋转产生向下的推力。不同大小、负载的机架,需要配合不同规格、功率的电机。
(2)基本原理
每一次换向都会有一组绕组处于正向通电;第二组反相通电;第三组不通电。转子永磁体的磁场和定子钢片产生的磁场相互作用就产生了转矩,理论上,当这两个磁场夹角为90°时会产生最大的转矩,当这两个磁场重合时转矩变为0,为了使转子不停的转动,那么就
需要按顺序改变定子的磁场,就像转子的磁场一直在追赶定子的磁场一样。典型的“六步电流换向”顺序图展示了定子内绕组的通电次序。
(3)指标参数
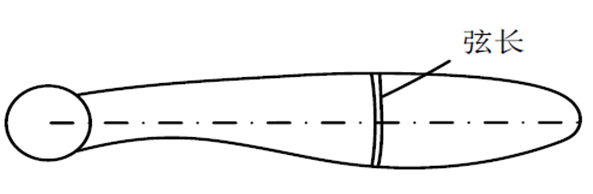
1)尺寸一般用4个数字表示,其中前面2位是电机转子的直径,后面2位是电机转子的高度。简单地说,前面2位越大,电机越肥,后面2位越大,电机越高。又高又大的电机,功率就更大,适合做大四轴。比如:2212电机表示电机转子的直径是22mm,电机转子的高度是12mm。

2)标称空载KV值 无刷电机KV值定义为“ 转速/伏特”,意思为输入电压增加1伏特,无刷电机空转转速增加的转速值。例如:1000KV电机,外加1V电压,电机空转时每分钟转1000转,外加2V电压,电机空转就2000转了。单从KV值,无法评价电机的好坏,因为不同KV值有适用不同尺寸的桨。
3)标称空载电流和电压在空载试验时,对电动机施加标称空载电压(通常为10V),使其不带任何负载空转,定子三相绕组中通过的电流,称为标称空载电流
4)最大瞬时电流/最大持续电流 电机能承受的最大瞬时通过的电流,电机能允许持续工作而不烧坏的最大连续电流
5)内阻电机电枢本身存在内阻,虽然该内阻很小,但是由于电机电流很大有时甚至可以达到几十安培,所以该小内阻不可忽略
电调
(1) 作用
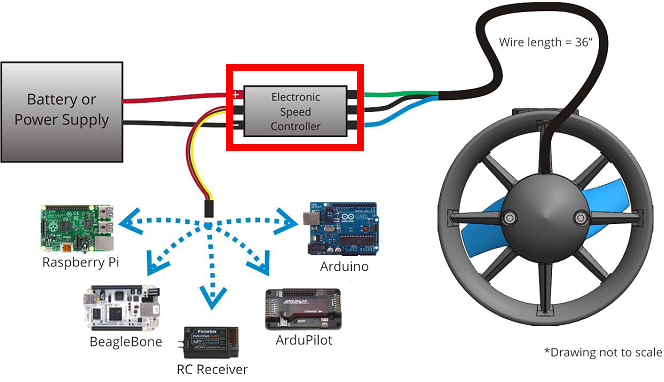
电调全称电子调速器,英文ElectronicSpeed Control,简称ESC。
1)电调最基本的功能就是电机调速(通过飞控板给定PWM信号进行调节
2)为遥控接收器上其它通道的舵机供电
3)充当换相器的角色,因为无刷电机没有电刷进行换相(直流电源转化为三相电源供给无刷电机,并对无刷电机起调速作用),所以需要靠电调进行电子换相
4)电调还有一些其它辅助功能,如电池保护,启动保护、刹车等
(2)指标参数

1)电流
•无刷电调最主要的参数是电调的功率,通常以安数A来表示,如10A、20A、30A。不同电机需要配备不同安数的电调,安数不足会导致电调甚至电机烧毁。
•更具体地,无刷电调有持续电流和X秒内瞬时电流两个重要参数,前者表示正常时的电流,而后者表示X秒内的容忍的最大电流。
•选择电调型号的时候一定要注意电调最大电流的大小是否满足要求,是否留有足够的安全裕度容量,以避免电调上面的功率管烧坏。
2)内阻
电调具有相应内阻,其发热功率需要得到注意。有些电调电流可以达到几十安培,发热功率是电流的平方的函数,所以电调的散热性能也十分重要,因此大规格电调内阻一般都比较小。
3)刷新频率
电机的响应速度与电调的刷新速率有很大关系。在多旋翼开始发展之前,电调多为航模飞机而设计,航模飞机上的舵机由于结构复杂,工作频率最大为50Hz。相应地,电调的刷新速率也都为50Hz。多旋翼与其它类型飞机不同,不使用舵机,而是由电调直接驱动,其响应速度远超舵机。目前,具备UltraPWM功能的电调可支持高达500Hz的刷新率。
4) 可编程特性
通过内部参数设置,可以达到最佳的电调性能。通常有三种方式可对电调参数进行设置:
•可以通过编程卡直接设置电调参数
•通过USB连接,用电脑软件设置电调参数
•通过接收器,用遥控器摇杆设置电调参数。设置的参数包括:电池低压断电电压设定、电流限定设定、刹车模式设定、油门控制模式、切换时序设定、断电模式设定、起动方式设定以及PWM 模式设定等等
5)兼容性 如果电机和电调兼容性不好,那么会发生堵转,即电机不能转动了