rplidar的使用
新上手的激光雷达,第一次使用。根据网上的教程,先搭建环境跑起来。
安装rviz
- sudo apt-get install ros-kinetic-rviz
通过apt-get安装rviz,我的电脑上安装rviz的时候需要很多的依赖
可以通过sudo apt-get -f install 试一下我的电脑上不行,干脆直接安装所有的依赖文件
sudo apt-get install qt5-qmake qtbase5-dev qtbase5-private-dev qtmultimedia5-dev libqt5opengl5-dev qtscript5-private-dev qttools5-private-dev qtdeclarative5-dev qtdeclarative5-private-dev libqt5webkit5-dev libqt5xmlpatterns5-private-dev libqt5x11extras5-dev libpyside2-dev ros-kinetic-python-qt-binding ros-kinetic-rviz
这个安装的过程比较长,需要等待。 - rosdep install rviz
- rosmake rviz
安装更新opengl
安装好rviz之后,可以验证一下,打开终端,roscore,再试着运行一下,rosrun rviz rviz
如果能正确看到rviz的界面,那么这个rviz就真正安装成功了。但是我的电脑运行的时候出现了一下段错误
原因看一下博客:
https://blog.csdn.net/tanjia6999/article/details/82706127
我的问题是其中第三个原因,opengl没有更新:
解决办法如下:
http://ubuntuhandbook.org/index.php/2018/01/how-to-install-mesa-17-3-3-in-ubuntu-16-04-17-10/
使用rplidar
- 更改权限 sudo chmod 777 /dev/ttyUSB*
- 下载软件包sudo apt-get install ros-kinetic-rplidar-ros
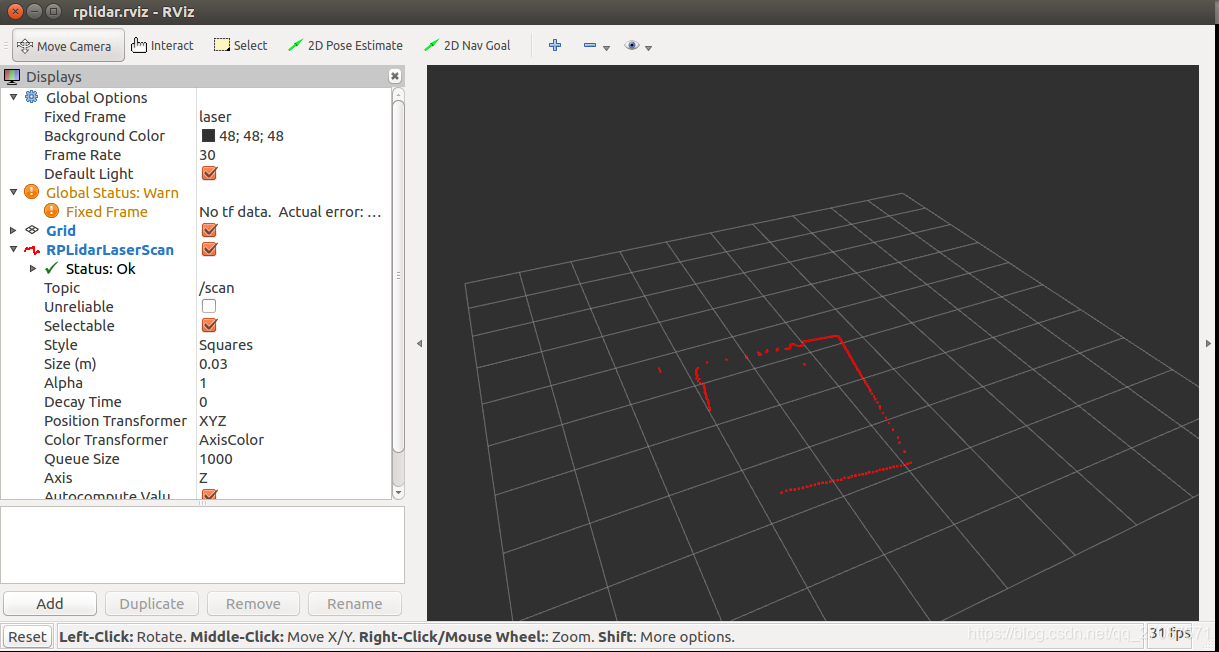
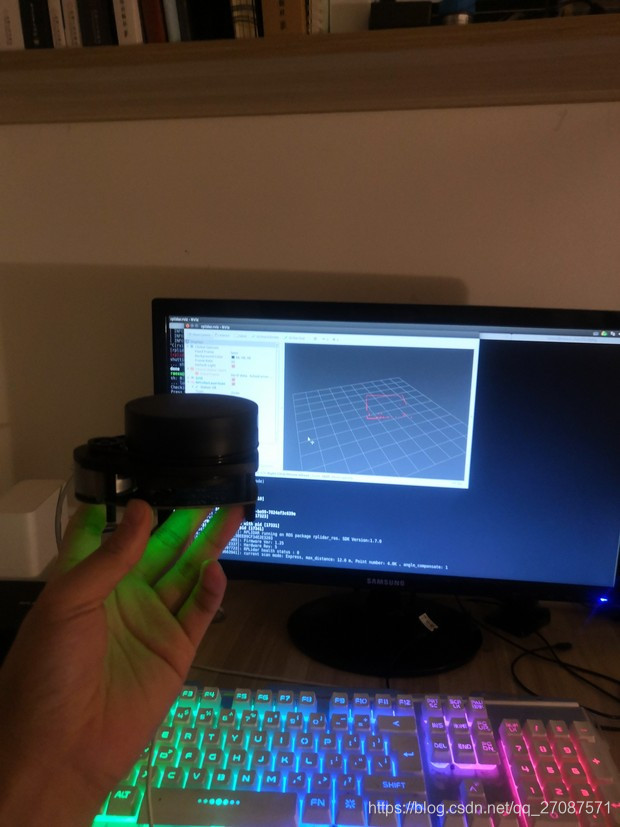
- roslaunch rplidar_ros view_rplidar.launch
运行结果
使用hector_slam
- 安装slam的软件包
使用命令安装,或者是直接在git上下载对应的安装包安装。
sudo apt-get install ros-indigo-hector-slam
或者是
cd ~/catkin_ws/src
git clone https://github.com/tu-darmstadt-ros-pkg/hector_slam
cd ~/catkin_ws
catkin_make - 接下来直接开始跑就可以了
roslaunch rplidar_ros view_slam.launch
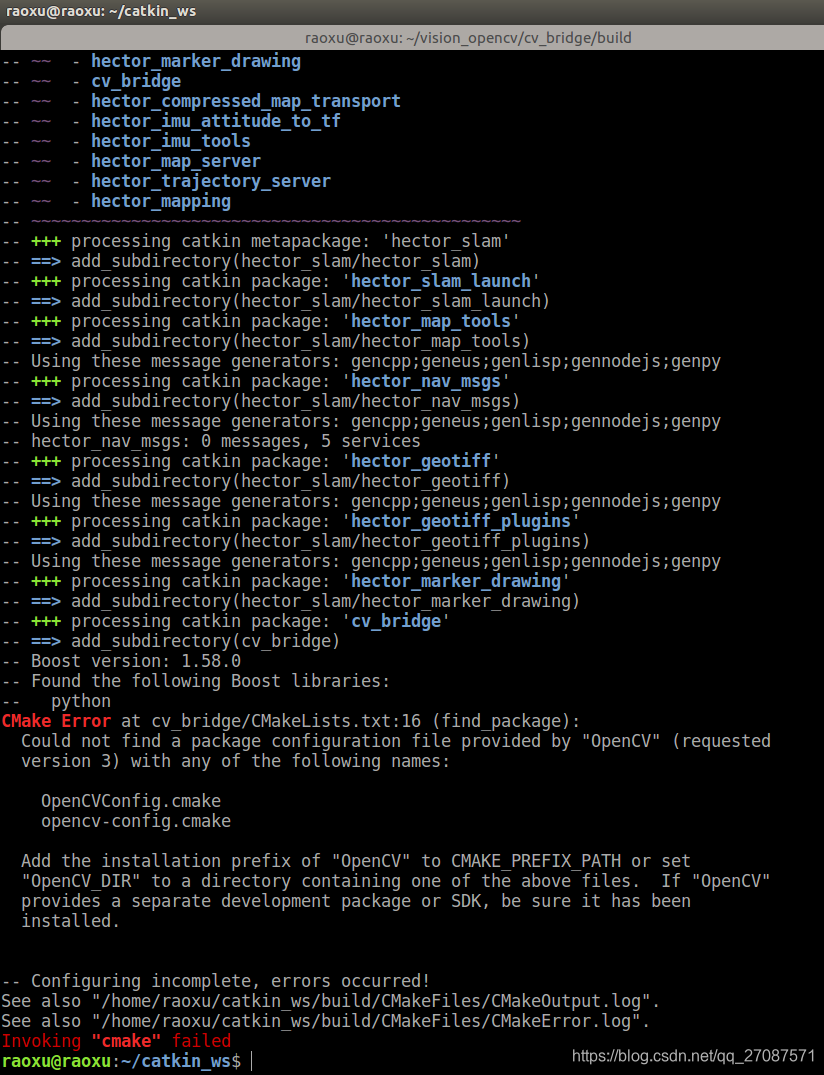
我跑的时候出现了一个问题,下载hector_slam的包无法编译通过,打印找不到cv_bridge
问题如下
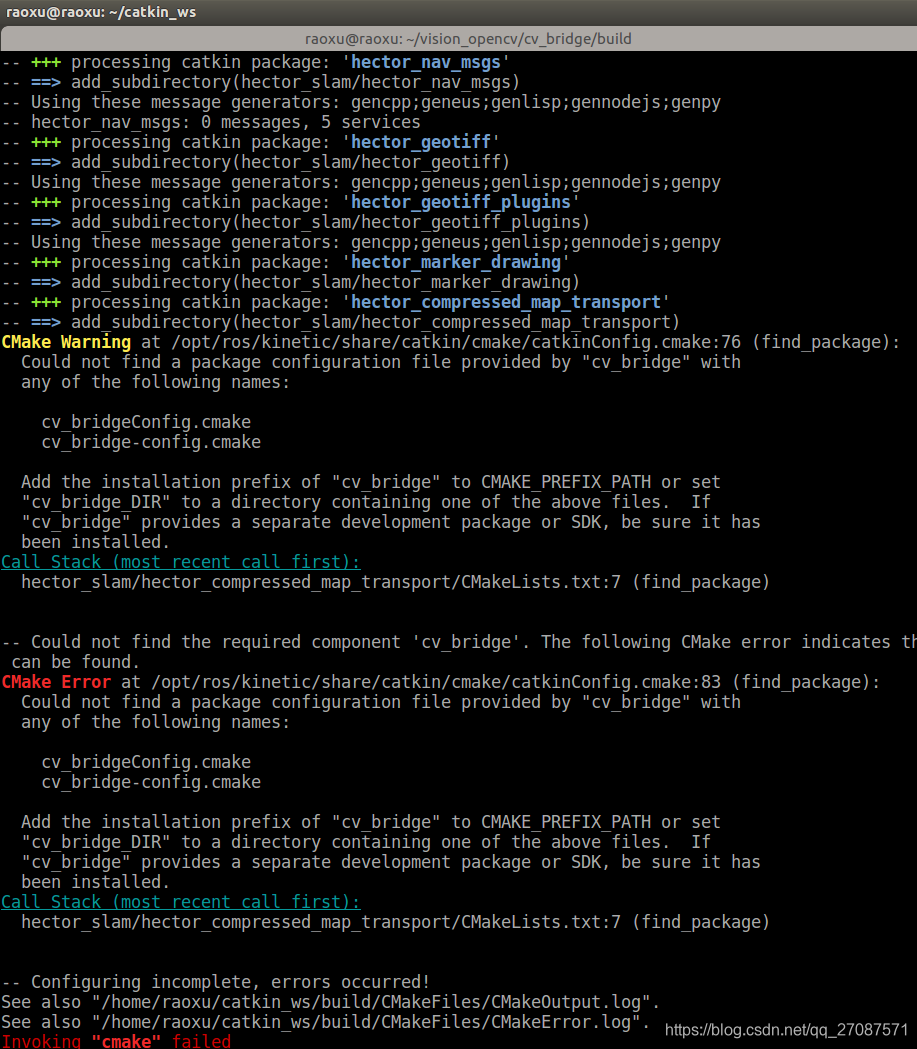 经过查找发现
经过查找发现
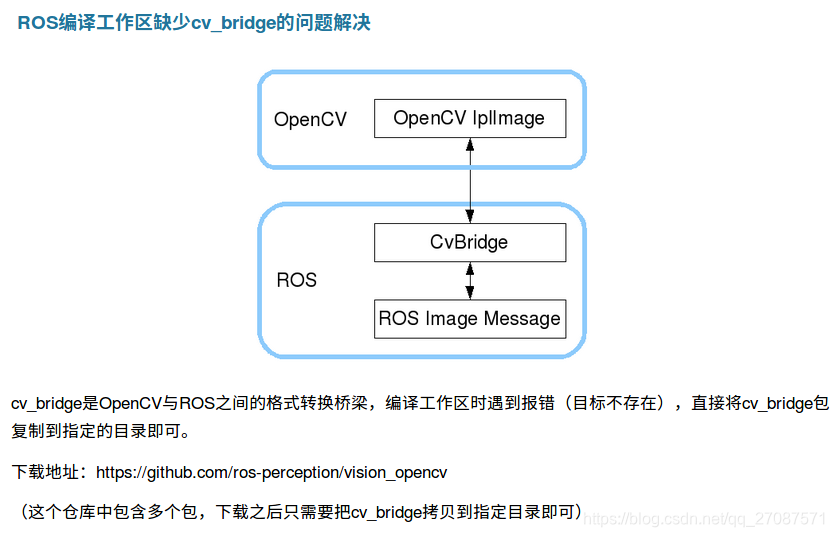
ros需要cv_bridge,因此这里我先下载安装cv_bridge
cd ~/catkin_ws/src
git clone https://github.com/ros-perception/vision_opencv.git
cd ~/catkin_ws
catkin_make
接下来我继续编译发现新的错误
找不到opencv,因此我需要在安装一下opencv
找了一下教程如下
https://blog.csdn.net/cocoaqin/article/details/78163171
但是opencv的包下载实在是太慢了,因此我在csdn上下载了。
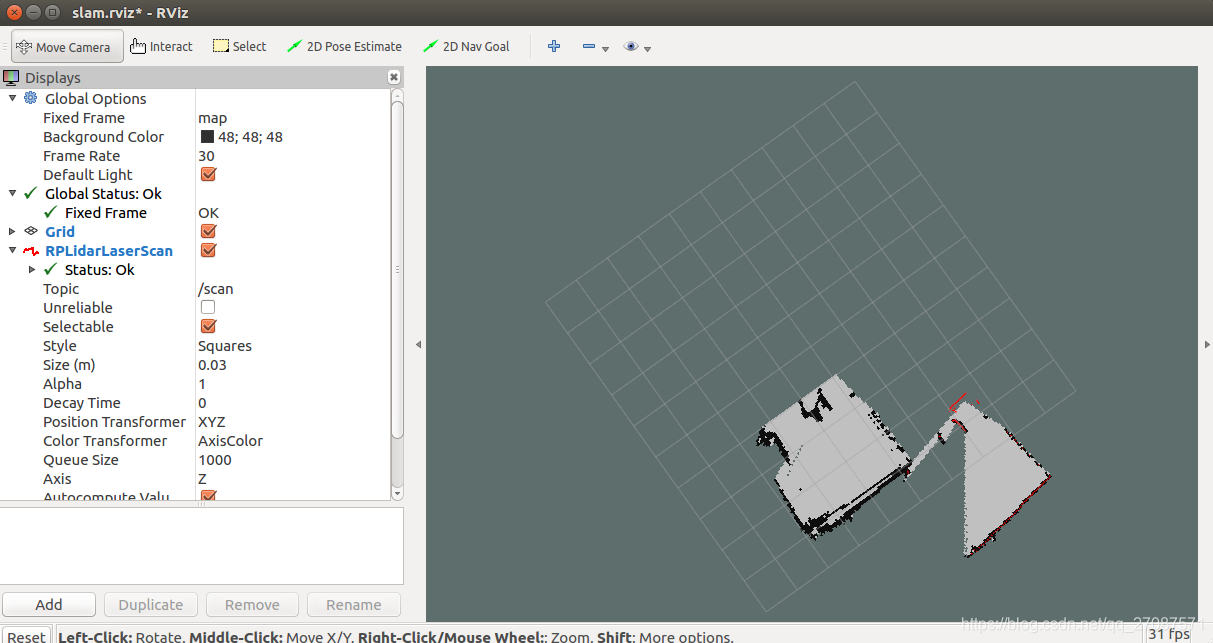
经过这两步之后编译可以通过,以下是运行结果
注意事项
新手初次接触ros,犯了两个低级错误
- 刚开始忘了设置环境变量,source ~/catkin_ws/devel/setup.sh。导致我一直找不到view_slam.launch
,就是忘了设置路径。添加到.bashrc里面去就好了,以后就不会出问题了。 - 设置usb设备的权限,否则跑起来时候,会报错。以下永久更改usb权限
https://blog.csdn.net/hnlyzxy123/article/details/80305498
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)