文章目录
- intel realsense D4
- 2 intel realsense D400介绍
- 2.3 立体视觉深度技术概述
- 2.4 摄像机系统框图
- 2.5 英特尔Intel® RealSense™ 深度模块D400系列产品
- 2.6 英特尔Intel® RealSense™ 深度相机D400系列
- 3 部件规格
- 3.1 视觉处理器D4摄像头系统组件
- 3.2 主机处理器
- 3.3 视觉处理器D4
- 3.3.1 视觉处理器D4特点
- 3.3.7 视觉处理器D4存放和使用环境要求
- 3.3.8 视觉处理器D4 散热
- 3.6 立体深度模块
- 3.6.1 硬件结构
- 3.6.2 立体深度模块特点
- 3.6.2 红外信号发射器
- 3.6.3 彩色相机
- 3.6.4 温度要求
- 3.7 英特尔Intel® RealSense™ 视觉处理器D4板
- 3.7.1 板子布局
- 3.7.2 柔性和刚性中间层互连件
- 3.7.4 外部传感器同步连接器
- 3.8 英特尔Intel® RealSense™ 深度模块D400系列深度相机
-
intel realsense D4
2 intel realsense D400介绍
2.3 立体视觉深度技术概述
英特尔Intel® RealSense™ D400系列深度相机使用立体视觉来计算深度。立体视觉实现包括左成像器、右成像器和可选的红外投影仪。红外投影仪投射不可见的静态红外图案,以提高低纹理场景中的深度精度。左和右成像器捕获场景并将成像器数据发送到深度成像(视觉)处理器,该处理器通过将左图像上的点与右图像相关联,并通过左图像上点和右图像上点之间的偏移来计算图像中每个像素的深度值。深度像素值被处理以生成深度帧。随后的深度帧创建深度视频流。
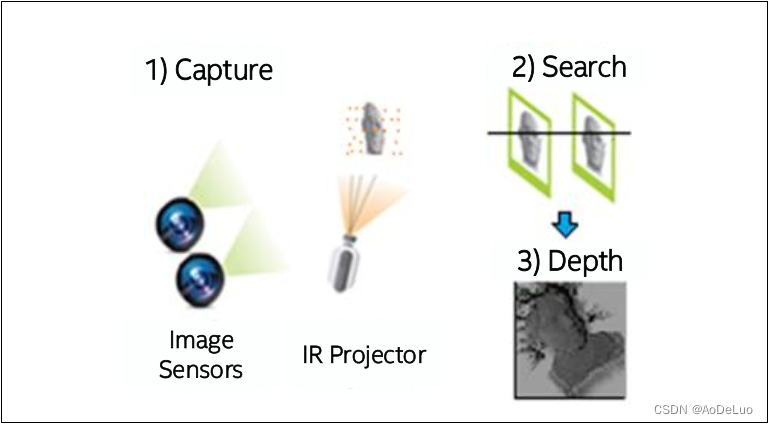 深度像素值是来自成像器的平行平面的测量值,而不是如图所示的绝对范围
深度像素值是来自成像器的平行平面的测量值,而不是如图所示的绝对范围
|
|
 深度测量(Z)与距离(R)的关系
深度测量(Z)与距离(R)的关系
|
|
2.4 摄像机系统框图
相机系统有两个主要组件,视觉处理器D4和深度模块。视觉处理器D4位于主处理器主板上,或者位于带有USB2.0/USB 3.1 Gen 1或MIPI连接到主处理器的分立板上。深度模块将左右成像器与可选的红外投影仪和RGB颜色传感器结合在一起,实现立体视觉。RGB颜色传感器数据通过主机处理器主板或D4板上的彩色图像信号处理器(ISP)发送到视觉处理器D4。
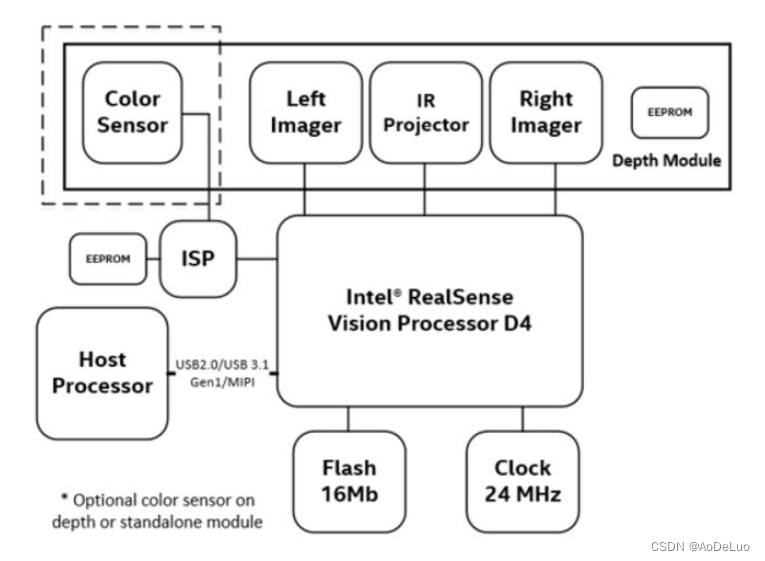 视觉处理器D4摄像头系统框图
视觉处理器D4摄像头系统框图
|
|
2.5 英特尔Intel® RealSense™ 深度模块D400系列产品
 深度模块D400系列产品
深度模块D400系列产品
|
|
2.6 英特尔Intel® RealSense™ 深度相机D400系列
 深度相机D400系列产品
深度相机D400系列产品
|
|
D435f=D435,区别是D435f采用750nm近红外滤光片(CLAREX®NIR-75N)覆盖玻璃,投影仪和RGB传感器开口上有孔。滤光片透射近红外光并吸收可见光。过滤器厚度=0.5 mm。
3 部件规格
3.1 视觉处理器D4摄像头系统组件
| 组成部分 | 说明 |
|---|
| Host Processor | 从Vision接收深度和其他数据流的主机处理器 处理器D4 |
| Vision Processor D4 | 带USB 2.0/USB 3.1 Gen 1或MIPI接口的深度成像处理器 连接到主机处理器 |
| Clock | 视觉处理器D4的24 MHz时钟源 |
| Serial Flash Memory | SPI 16 Mb串行闪存,用于固件存储 |
| Stereo Depth Module | 相机模块,带左右成像器、颜色传感器†、IR投影仪†,封装在加强件中 |
| Power Delivery | 主板/视觉处理器D4板上的电路,用于交付和管理 视觉处理器D4和立体深度模块的电源。 |
| Stereo Depth Connector and Interposer | 主板/视觉处理器D4板上的50针连接器和带插入器的立体声深度模块,用于连接 |
3.2 主机处理器
视觉处理器D4的主处理器接口为USB 2.0/USB 3.1 Gen 1或MIPI。为确保最佳服务质量,视觉处理器D4必须连接到主机处理器系统内的专用USB 3.1 Gen 1根端口。
3.3 视觉处理器D4
视觉处理器D4的主要功能是执行深度立体视觉处理。主处理器主板或视觉处理器D4板上的视觉处理器D3通过USB2.0/USB 3.1 Gen 1或MIPI与主处理器通信,并从立体深度模块接收传感器数据。视觉处理器D4支持MIPI CSI-2通道,用于连接图像传感器。
3.3.1 视觉处理器D4特点
-
28nm CMOS工艺技术
-
5个MIPI摄像机端口,每个MIPI通道能够处理高达750 Mbps的数据传输
-
USB 2.0/USB 3.1 Gen 1或MIPI接口至主机系统
-
相机光学和对准补偿的图像校正
-
红外投影仪(激光)控制
-
串行外围接口,用于与外部SPI闪存进行快速数据传输
-
集成I2C端口
-
通用输入/输出引脚
-
有源电源门控
3.3.7 视觉处理器D4存放和使用环境要求
| 环境 | 说明 | 最小值 | 最大值 | 单位 |
|---|
| 非使用状态 | | 0 | 85 | 摄氏度 |
| 使用中 | | 0 | 85 | 摄氏度 |
3.3.8 视觉处理器D4 散热
热设计应确保视觉处理器D4不超过组件外壳温度限制。还必须注意确保视觉处理器D4的热量不会传递到成像系统或立体深度模块的其他部件。最好将视觉处理器D4与立体深度模块热隔离。
3.6 立体深度模块
3.6.1 硬件结构
 立体深度模块D410
立体深度模块D410
|
|
 立体深度模块D430
立体深度模块D430
|
|
 立体深度模块D450
立体深度模块D450
|
|
 立体深度模块D401
立体深度模块D401
|
|
3.6.2 立体深度模块特点
 立体深度模块特点
立体深度模块特点
|
|
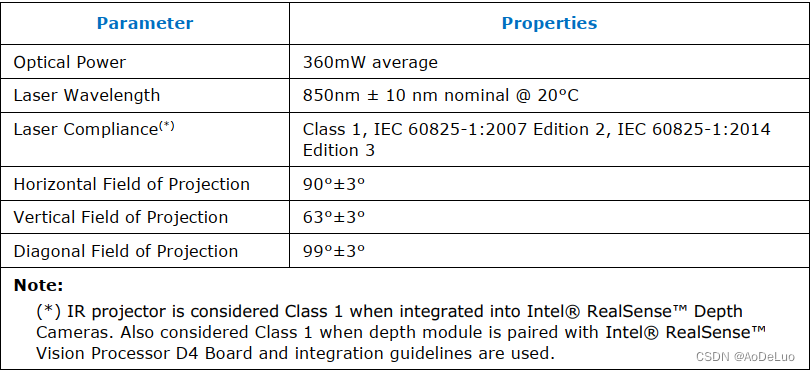
3.6.2 红外信号发射器
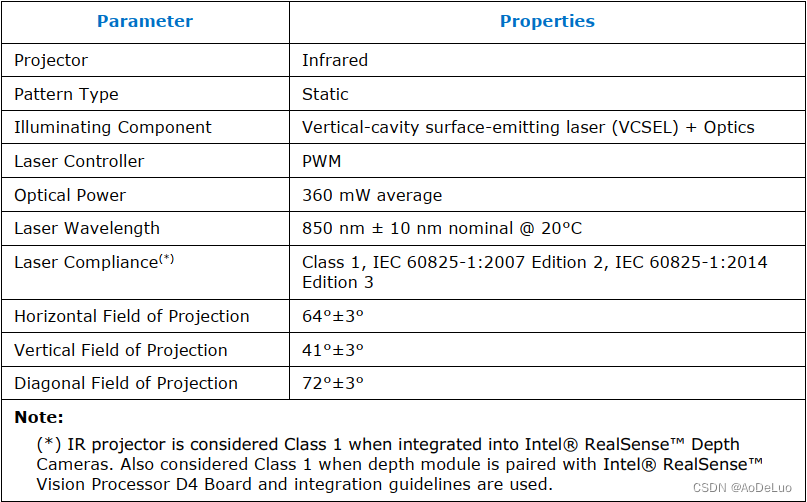 D41x系列
D41x系列
|
|
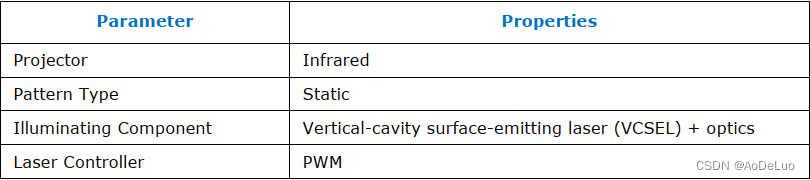 D43X,D45X系列
D43X,D45X系列
|
|
 D43X,D45X系列
D43X,D45X系列
|
|
3.6.3 彩色相机
 D415
D415
|
|
 D450
D450
|
|
 D401
D401
|
|
3.6.4 温度要求
| 环境 | 说明 | 最小值 | 最大值 | 单位 |
|---|
| 非使用状态 | | 0 | 50 | 摄氏度 |
| 使用中 | | 0 | 50 | 摄氏度 |
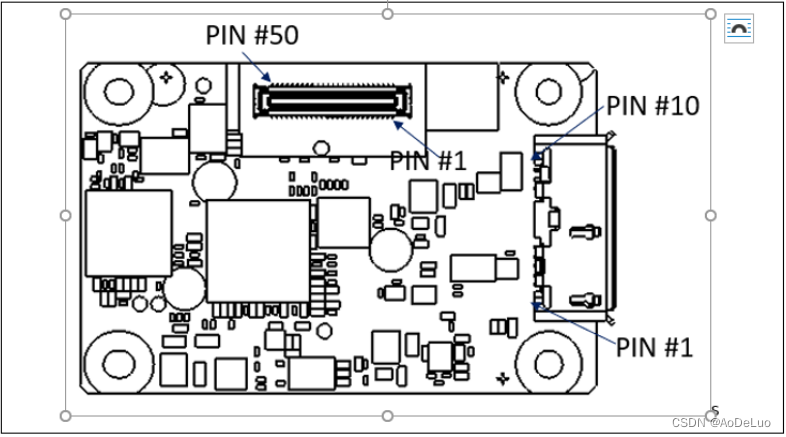
3.7 英特尔Intel® RealSense™ 视觉处理器D4板
3.7.1 板子布局
 V1 V3
V1 V3
|
|
 V4
V4
|
|
3.7.2 柔性和刚性中间层互连件
高速插入器一端有50针深度模块插座,可连接到立体深度模块上的50针深度模件插头,另一端有50引脚深度模件插座,可插入到视觉处理器D4板上的50引脚深度模块插座。高速柔性插入器由系统集成商定制开发和采购。
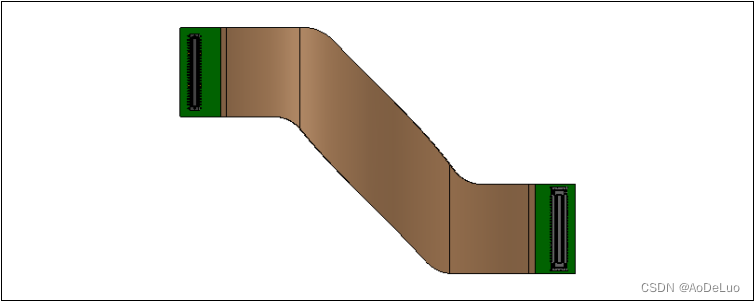 柔性连接器
柔性连接器
|
|
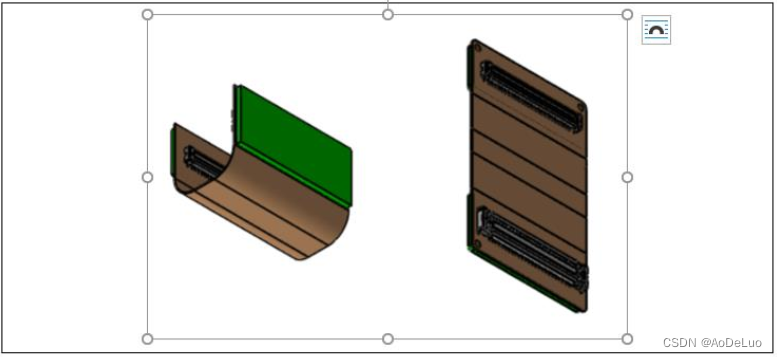 柔性连接器
柔性连接器
|
|
 刚性连接器
刚性连接器
|
|
 深度模块连接器方向和引脚位置–D415、D435、,D435i、D435f、D455
深度模块连接器方向和引脚位置–D415、D435、,D435i、D435f、D455
|
|
3.7.4 外部传感器同步连接器
外部传感器连接器提供外部传感器与深度输出同步的接口。对于D415和D455,深度和RGB传感器都可以通过外部触发器同步。对于D435、D435i和D435f,只有深度传感器可以通过外部触发器同步。对于D401,外部同步机制未暴露。
 外部传感器连接器详细信息
外部传感器连接器详细信息
|
|
 外部传感器同步连接器针脚列表
外部传感器同步连接器针脚列表
|
|
3.8 英特尔Intel® RealSense™ 深度模块D400系列深度相机
 D400系列深度相机
D400系列深度相机
|
|
3.9 散热建议
-
安装支架材料–使用安装螺钉(2X M3螺钉)和与D400系列深度相机的外围外壳相同或相似的材料(相等或更低的热阻或高导电率)。材料–铝6000系列。
-
增加配合面–安装支架与D400系列深度相机的配合面可增加2倍。深度相机的安装支架配合表面面积越大越好。
-
建议减少配合面缺陷、缺陷、粗糙度和间隙。材料中缺陷的任何增加都会增加热接触电阻,降低热溶液的散热效率。附件选项应包括环氧化合物或热胶带/膏
-
虽然热管和液冷解决方案具有优势,但它们也大大增加了系统集成的复杂性。使用风扇将空气直接流向深度相机(背面安装面2X M3
螺钉)。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)