文章目录
- 0 结果
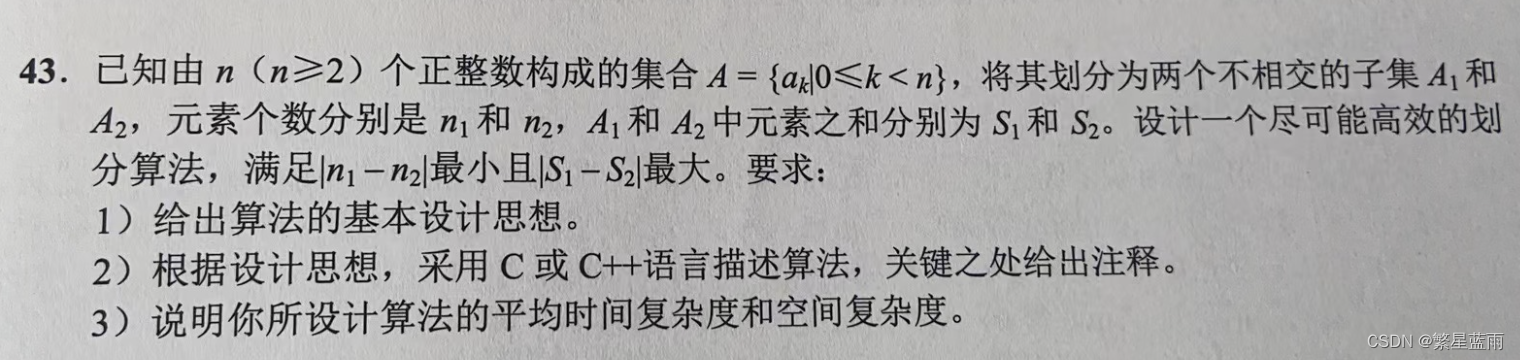
- 1 题目
- 2 思路
- 2.1 思路1(较优解:排序)
- 2.2 思路2(最优解:类快排思想排序)
- 附录
0 结果
较优解:
最优解:
1 题目
2 思路
为了使
|
n
1
−
n
2
|
|n_1-n_2|
|n1−n2|尽可能小,
S
1
−
S
2
S_1-S_2
S1−S2尽可能的大,则需要使划分的两个子集个数尽量想等,较小元素为一个子集,较大元素为一个子集。
2.1 思路1(较优解:排序)
根据前面的思路,对数组进行快速排序得到升序序列,前一个序列取
0
∼
n
/
2
−
1
0 \sim n/2-1
0∼n/2−1,后一个序列取
n
/
2
∼
n
−
1
n/2 \sim n- 1
n/2∼n−1。
#include <cstdio>
#include <algorithm>
void Qsort(int A[], int L, int R){
if(L >= R) return;
int pivot, i = L, j = R;
std::swap(A[L], A[rand()%(R - L + 1) + L]);
pivot = A[L];
while(i < j){
while(i < j && A[j] > pivot) j--;
while(i < j && A[i] <= pivot) i++;
if(i < j) std::swap(A[i], A[j]);
}
std::swap(A[L], A[i]);
Qsort(A, L, i - 1);
Qsort(A, i + 1, R);
}
void ans(int A[], int n){
Qsort(A, 0, n - 1);
for(int i = 0;i < n/2;i++){
printf("%d ", A[i]);
}
printf("\n");
for (int i = n/2; i < n; ++i) {
printf("%d ", A[i]);
}
printf("\n");
}
int main(){
int A[] = {1, 8,3, 6,5, 4,7,2};
ans(A, sizeof (A)/sizeof (A[0]));
return 0;
}
时间复杂度:
O
(
n
l
o
g
n
)
O(nlogn)
O(nlogn)
空间复杂度:
O
(
l
o
g
n
)
O(logn)
O(logn)
2.2 思路2(最优解:类快排思想排序)
对数组
A
[
0
∼
n
−
1
]
A[0 \sim n-1]
A[0∼n−1]进行类似快速排序的做法,在处理左右区间时只处理可能包含中位数的区间,即如果区间的范围是
[
l
,
r
]
[l, r]
[l,r],则只有
l
<
=
n
/
2
−
1
<
r
l<=n/2-1<r
l<=n/2−1<r才会处理该区间。
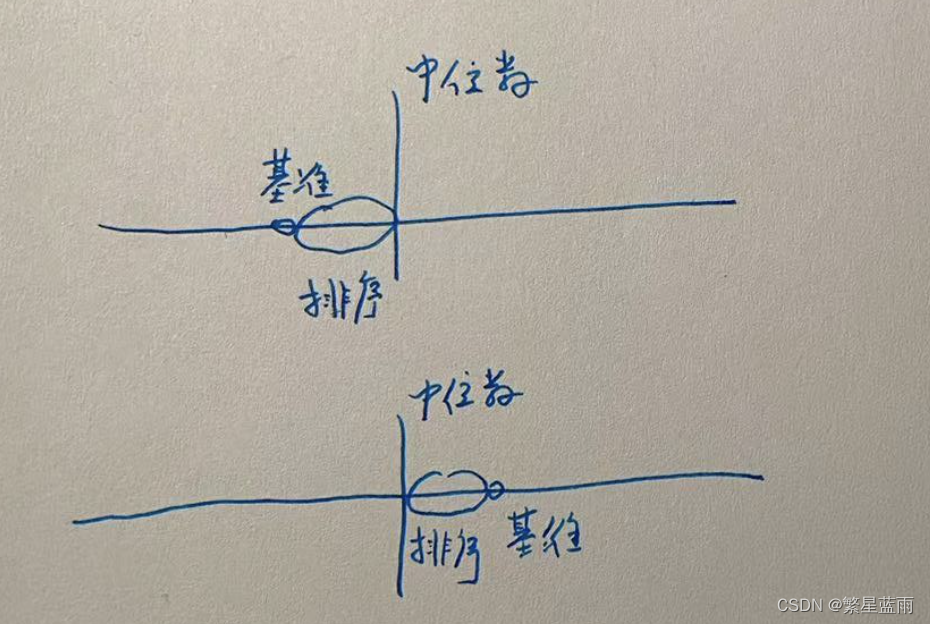
因为快排的基准元素元素左边一定小于等于基准元素,基准元素右边的一定大于等于基准元素,故如果中位数小于基准元素,则只对右边的部分继续排序,中位数大于基准元素,则只对左边的部分继续排序。含义如下图所示:
#include <cstdio>
#include <algorithm>
void Qsort(int A[], int L, int R,int n){
if(L >= R) return;
int pivot, i = L, j = R;
std::swap(A[L], A[rand()%(R - L + 1) + L]);
pivot = A[L];
while(i < j){
while(i < j && A[j] > pivot) j--;
while(i < j && A[i] <= pivot) i++;
if(i < j) std::swap(A[i], A[j]);
}
std::swap(A[L], A[i]);
if(n/2 - 1 >= L && n/2 - 1 <= i - 1)
Qsort(A, L, i - 1, n);
if(n/2 - 1 >= i + 1 && n/2 - 1 <= R)
Qsort(A, i + 1, R, n);
}
void ans(int A[], int n){
Qsort(A, 0, n - 1, n);
for(int i = 0;i < n/2;i++){
printf("%d ", A[i]);
}
printf("\n");
for (int i = n/2; i < n; ++i) {
printf("%d ", A[i]);
}
printf("\n");
}
int main(){
int A[] = {3,4,2,1,7,8,5,6};
ans(A, sizeof (A)/sizeof (A[0]));
return 0;
}
时间复杂度:
O
(
n
)
O(n)
O(n)
空间复杂度:
O
(
l
o
g
n
)
O(logn)
O(logn)
附录
408历年真题算法题解析
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)