C语言之线性表链式存储结构
文章目录
- C语言之线性表链式存储结构
- 前言
- 一、线性表链式存储结构定义
- 二、相关概念
-
- 三、代码描述
- 1.单链表结点定义
- 1.单链表的创建
- 2.单链表的查找
- 3.在单链表中,替换某一个位置的数据
- 4.在单链表中,某一个位置插入数据
- 4.在单链表中,某一个位置删除数据
前言
线性表存在不足的解决办法:`
线性表最大的缺点就是插入和删除时需要移动大量元素,这需要耗费大量时间;因此就引出链式存储结构,用任意的存储单元存储线性表的数据元素,这组存储单元可以是连续的,也可以是不连续。
一、线性表链式存储结构定义
定义:
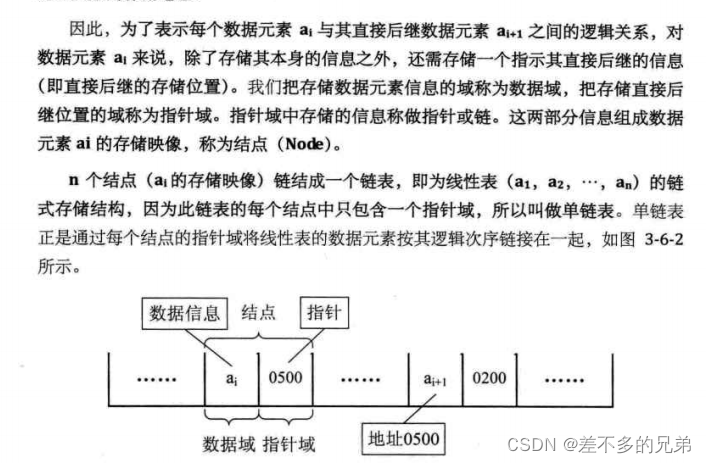
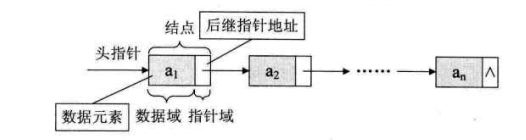
以前顺序结构中,每个数据元素只需要存数据元素就可以了,但链式结构中,为了将链表连接起来,每个元素不仅要存储数据元素信息,还需要存储它的后继元素的存储地址。
二、相关概念
1.结点
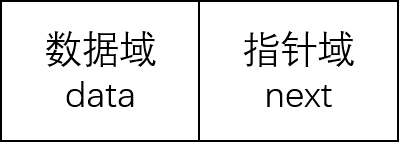
链表结点由数据域(存放本身信息)和指针域(指向后继结点的指针)构成。如下图所示:
1.头指针
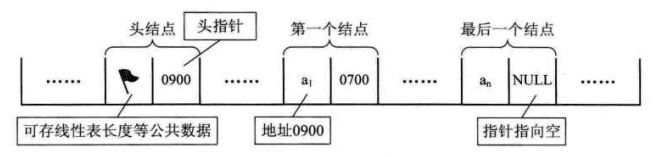
对于线性表来说,总得有个头有个尾,链表也不例外,我们把链表中的第一个结点的存储位置叫做头指针,整个链表的存取就必须是从头指针开始进行了。
最后一个结点的指针为空(NULL)。
有时候我们为了更方便的对链表进行操作,会在单链表的第一个结点前附设一个结点,称为头结点。
头结点的数据域可以不存储任何信息,也可以存储如线性表长度等附加信息。
空链表:

带头结点的单链表:

不带头结点的单链表:
三、代码描述
1.单链表结点定义
typedef int ElemType;可以随着数据元素类型不用,自己定义
链表的结构体
struct Node
{
ElemType data;
struct Node* next;
}Node;
typedef struct Node* LinkList;链表指针别名
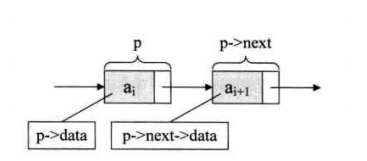
总这个结构定义中,我们也可以知道,结点由存放数据元素的数据域和存放后继结点地址的指针域组成。假设p是指向线性表第i个元素的指针,则该结点ai的数据域,可以用p->data来表示,结点ai的指针域,可以用p->next来表示。p->next指向(意思就是存储第i个元素的地址)第i+1个元素。也就是说,如果p->data=ai,p->next->data=ai+1;
1.单链表的创建
单链表创建算法思路:
- 初始化空链表L-创建头结点
- 声明中间变量指向头结点,用于遍历链表
- 循环
- 生成新的结点
- 新的结点指针指向头结点(指针)
- 头结点指针指向新结点
头插法
LinkList CreatListHead(int len)
{
LinkList L = (LinkList)malloc(sizeof(Node));
LinkList temp=L;
temp->next = NULL;
for (int i=0;i<len;i++)
{
LinkList p= (LinkList)malloc(sizeof(Node));
scanf_s("%d",&p->data);
p->next = temp->next;
temp->next = p;
}
return (LinkList)L;
}
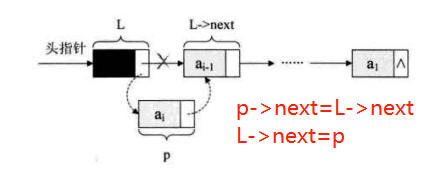
解释说明:p->next是下一个结点指针的地址
p是结点指针
尾插法
链表的创建,建立带头节点的单链线性表L,随机产生N个元素值
LinkList CreatListTail(int len)
{
LinkList L = (LinkList)malloc(sizeof(Node));创建个头节点
LinkList temp = L; 声明一个中间变量,指向头结点,用于遍历链表(曾因没有这个中间变量而出错)
temp->next = NULL;
for (int i = 0; i < len; i++)
{
LinkList p = (LinkList)malloc(sizeof(Node));
scanf_s("%d", &p->data);
temp->next = p; 头结点指向新的结点(存储新结点地址)
temp = p; 将新结点变成头结点等待下一个新结点插入
}
temp->next = NULL;将最后一个结点的NEXT结点为空,表示链表结束
return (LinkList)L;
}
2.单链表的查找
因为链表不支持随机访问,即链表的存取方式是顺序存取的(注意“存储”与“存取”是两个不一样的概念),所以要查找某结点,必须通过遍历的方式查找。例如:如果想查找第3个结点,必须先遍历走过第1~2个结点,才能得到第3个结点。
单链表查找算法思路:
- 链表存在,输入要查找的值
- 声明中间变量指向头结点,用于遍历链表
- 循环
- 指针后移遍历链表
- 将链表中与查找值相等的数据返回
int SearchList(LinkList L,int elem)
{
LinkList temp;
temp = L;
int position = 0;用于返回数据在链表中的位置
while (temp->next)
{
position++;
temp = temp->next;指针后移遍历链表
if (elem == temp->data)
{
printf_s("Searchdata=%d,postion=%d\n", temp->data, position);
}
return position;
}
return 0;
}
3.在单链表中,替换某一个位置的数据
单链表替换算法思路:
- 链表存在,输入要替换的位置,要替换的数值
- 声明中间变量指向头结点,用于遍历链表
- 循环
- 指针后移遍历链表,到要替换的位置,跳出循环
- 将要替换的值,赋值到数据域
- 返回链表的头结点
LinkList ReplaceList(LinkList L,int pos,int elem)
{
LinkList temp = L;
temp = temp->next;指向开始结点(注意头结点与开始结点区别)头结点的后继结点为开始结点
for (int i = 0; i < pos; i++)
{
temp = temp->next;
}
temp->data = elem;
return L;
}
4.在单链表中,某一个位置插入数据
单链表插入算法思路:
- 链表存在,输入要插入的位置,要插入的数值
- 声明中间变量指向头结点,用于遍历链表
- 循环
- 指针后移遍历链表,找到插入位置前的结点
- 新建结点,将要插入的数据,赋值到新建结点的数据域
- 返回链表的头结点
LinkList InsertList(LinkList L,int pos,int elem)
{
LinkList temp = L;
int i = 0;
temp = temp->next;指向开始结点
for (i = 0; i < pos-1; i++)
{
if ((temp == NULL) || (i > pos - 1))
{
printf("%s:Insert false!\n", __FUNCTION__);
return L;
}
temp = temp->next;
}
LinkList new = (LinkList)malloc(sizeof(Node));
new->data = elem;
new->next = temp->next;新建结点指向插入的下个结点
temp->next = new;插入位置的结点指针指向新建结点
return L;
}
第二种写法
LinkList InsertList(LinkList L, int pos, int elem)
{
LinkList temp = L;
int i = 0;
while( (temp!=NULL)&&(i<pos-1) )
{
temp = temp->next;
++i;
}
if( (temp==NULL)||(i>pos-1) )
{
printf("%s:Insert false!\n",__FUNCTION__);
return (LNode*)temp;
}
LinkList new = (LinkList)malloc(sizeof(Node));
new->data = elem; 插入的新结点的数据域
new->next = temp->next; 新结点的next指针指向插入位置后的结点
temp->next = new; 插入位置前的结点的next指针指向新结点
return L;返回头结点
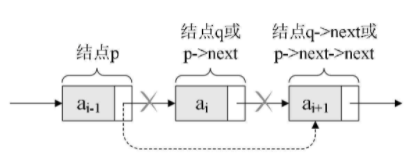
4.在单链表中,某一个位置删除数据
单链表插入算法思路:
- 链表存在,输入要插入的位置,要插入的数值
- 声明中间变量指向头结点,用于遍历链表
- 循环
- 指针后移遍历链表,找到插入位置前的结点
- 新建结点,将要插入的数据,赋值到新建结点的数据域
- 返回链表的头结点
LinkList DeleteList(LinkList L, int pos, int *elem)
{
LinkList temp = L;
int i = 0;
temp = temp->next;指向开始结点
LinkList del;新建结点
for (i = 0; i < pos - 1; i++)
{
if ((temp == NULL) || (i > pos - 1))
{
printf("%s:Insert false!\n", __FUNCTION__);
return L;
}
temp = temp->next;
}
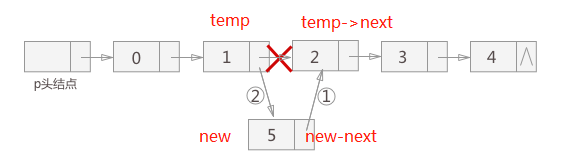
del = temp->next; 结点指向被删除结点
*elem = del->data; 结点数据域存储到elem中
temp->next = del->next;要删除位置前的结点指向要删除结点后的结点
free(del);释放内存
del = NULL;防止野指针
return L;
}
第二种写法
LinkList Delete(LinkList L, int pos, int *elem)
{
LinkList temp = L;
int i = 0;
while( (temp!=NULL)&&(i<pos-1) )
{
temp = temp->next;
++i;
}
if( (temp==NULL)||(i>pos-1) )
{
printf("%s:Delete false!\n",__FUNCTION__);
return temp;
}
LinkList del = temp->next;
*elem = del->data;
temp->next = del->next;
free(del);
del = NULL;
return L;
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)