基本概念
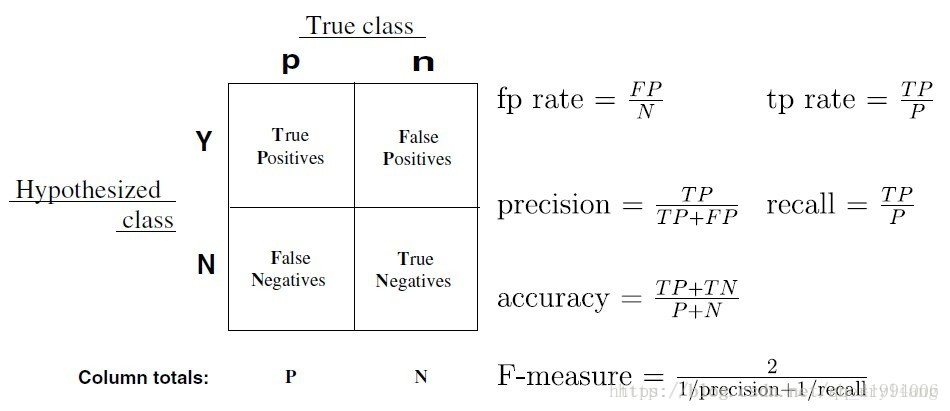
P-R曲线中,P为图中precision,即精准度,R为图中recall,即召回率。
Example
下面通过具体例子说明。
首先用训练好的模型得到所有测试样本的confidence score,每一类(如car)的confidence score保存到一个文件中(如comp1_cls_test_car.txt)。假设共有20个测试样本,每个的id,confidence score和ground truth label如下:
接下来对confidence score排序,得到:
P-R曲线:
我们得到top-5的结果,前score最高的前5个样本,预测label为1,即:
此例中采用top-5评估,也可采用其他评估,如AP50,即当预测框与真实框的IoU值大于这个阈值时,该预测框才被认定为真阳性(True Positive, TP),反之就是假阳性(False Positive,FP)。
在这个例子中,true positives就是指第4和第2张图片,false positives就是指第13,19,6张图片。是相对于方框内的元素而言,在这个例子中,confidence score排在top-5之外的元素为false negatives和true negatives,即:
其中,false negatives是指第9,16,7,20张图片,true negatives是指第1,18,5,15,10,17,12,14,8,11,3张图片。
那么,这个例子中Precision=2/5=40%,意思是对于car这一类别,我们选定了5个样本,其中正确的有2个,即准确率为40%;Recall=2/6=30%,意思是在所有测试样本中,共有6个car,但是因为我们只召回了2个,所以召回率为30%。此时为下图中第5个样本点。同理图中第一个样本点:P=1,R=1/6,第二个样本点,考虑前两个样本,P=1,R=2/6=
1/3。。。
这个例子的precision-recall曲线如下:
实际多类别分类任务中,我们通常不满足只通过top-5来衡量一个模型的好坏,而是需要知道从top-1到top-N(N是所有测试样本个数,本文中为20)对应的precision和recall。显然随着我们选定的样本越来也多,recall一定会越来越高,而precision整体上会呈下降趋势。把recall当成横坐标,precision当成纵坐标,即可得到常用的precision-recall曲线。
AP计算:
接下来说说AP的计算,此处参考的是PASCAL VOC CHALLENGE的
2010年之前
计算方法。
首先设定一组阈值,[0, 0.1, 0.2, …, 1]。然后对于recall大于每一个阈值(比如recall>0.3),我们都会得到一个对应的最大precision。这样,我们就计算出了11个precision。AP即为这11个precision的平均值。这种方法英文叫做11-point interpolated average precision。
当然PASCAL VOC CHALLENGE自
2010年后
就换了另一种计算方法。新的计算方法假设这N个样本中有M个正例,那么我们会得到
M个recall值(1/M, 2/M, ..., M/M),对于每个recall值r
,我们可以计算出对应(r' > r)的最大precision,然后对这
M个precision值取平均即得到最后的AP值
。计算方法如下:
相应的Precision-Recall曲线(这条曲线是单调递减的)如下:
AP衡量的是学出来的模型在每个类别上的好坏,mAP衡量的是学出的模型在所有类别上的好坏,得到AP后mAP的计算就变得很简单了,就是取所有AP的平均值。
参考:https://blog.csdn.net/zdh2010xyz/article/details/54293298