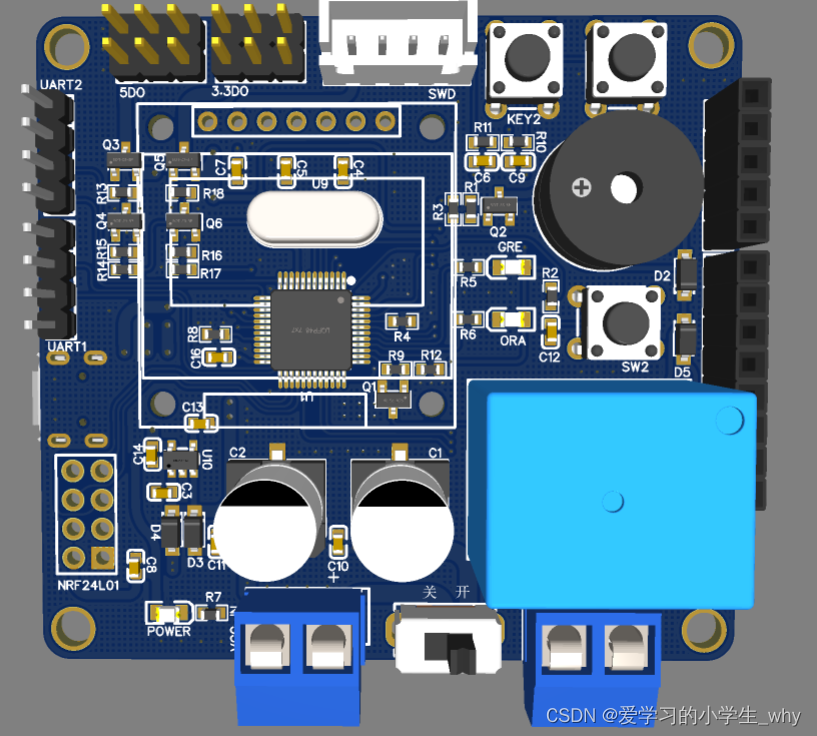
硬件环境
上节说到硬件平台的搭建,之前是在altium designer上面画好的,现在要支持国产,没办法只能在立创EDA上面重新画了,有的人说可以直接导入,但是立创打板不是使用EDA画的不给用优惠券,难受。
软件环境
前期为了先验证功能,没必要画太多心思在环境上面,本来想用rtt操作系统的,但是移植搭建调试也浪费时间,不过后续也有这方面的计划,上操作系统,但是手里有个现成的伪调度可以直接拿来用。
伪调度: 通过通用定时器或者滴答定时器用作任务的切换,如果直接在while里面做,第一如果想实现灯的闪烁要用延时函数,但是延时函数会导致整个CPU都在等,就会导致别的传感器数据获取也要等,这岂不是效率很低,但是通过定时器去切换任务,比如LED闪烁1S一次,我可以将LED状态切换函数放在1S的任务里,传感器数据获取的函数放在500ms里,1S到了后就直接切换LED状态即可,也不需要delay,这样任务都可以伪调度切换,实时性提高了很多。
终端: 打算使用letter shell,终端的好处就是可以通过串口操作一些特别的任务,而且想要什么数据可以打印出来,就和linux很像了,通过操作命令来手动控制一些东西,这感觉就和linux很像,但没有那么高级。
OLED二级菜单: 显示屏也不能搞得太低端,太单一的显示岂不是很无聊,怎么说也要放个动图,再来个菜单,通过按键去切哪一页,通过按键的时间长短来判断是OK/NEXT,还是CECLE/BACK,并且按键的时候蜂鸣器会响一下进行提示,有没有福斯遥控器的感觉。
2.4G通讯: 选用nrf24l0模块,一对一多无聊,一对多才好玩,通过切换频道和自定义协议来区分和哪个从机通讯,有人会问,如果是智能家居为啥不用WiFi要用2.4G模块,我的答案是我都要,小孩子才选,选用2.4G有一个原因是在没有网络的环境下也可以使用,举个例子500米之外你有个小农田,你想知道土壤PH或者湿度,大棚里面的温度,难道用一个nbiot模块?80多块钱,如果用2.4G十几块钱搞定,然后直接传回来,虽然没有nbiot那么稳定,但是不需要物联网卡,成本也低。
wifi模块: 现在使用的是ESP8266模块,云平台是onenet,协议采用HTTP单向上报和TCP透传,两个协议任意选择其中一个,TCP的话还需要写一个lua脚本,由于onenet可视化只能使用3个数据,所以只能拼接数据,然后在过滤器里面再解出来。
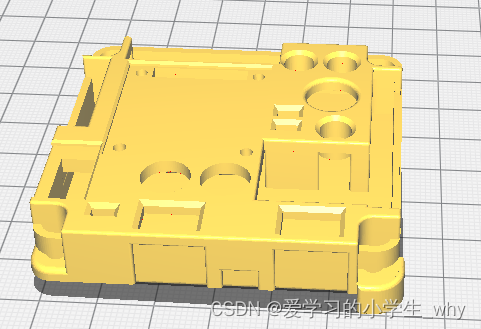
结构
板子有了,总要穿个衣服的吧,使用中望3D软件根据板子画一个外壳。
下面开始详细展开,有需要的可以联系我
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)