由于之前下载的是1.7版本的代码,现在v5版本的px4需要最新的代码固件,因此这里记录一下.
查看自己代码版本
查看自己仓库代码版本的命令如下:
git describe --always --tags
输出:
v1.7.0-rc3-9-g0e1c7eb
我之前是V1.7版本的代码,现在要去做实验,需要1.8版本的代码
下载指定版本的代码及错误处理
代码有哪些版本可以进官方的Github上看:PX4代码仓库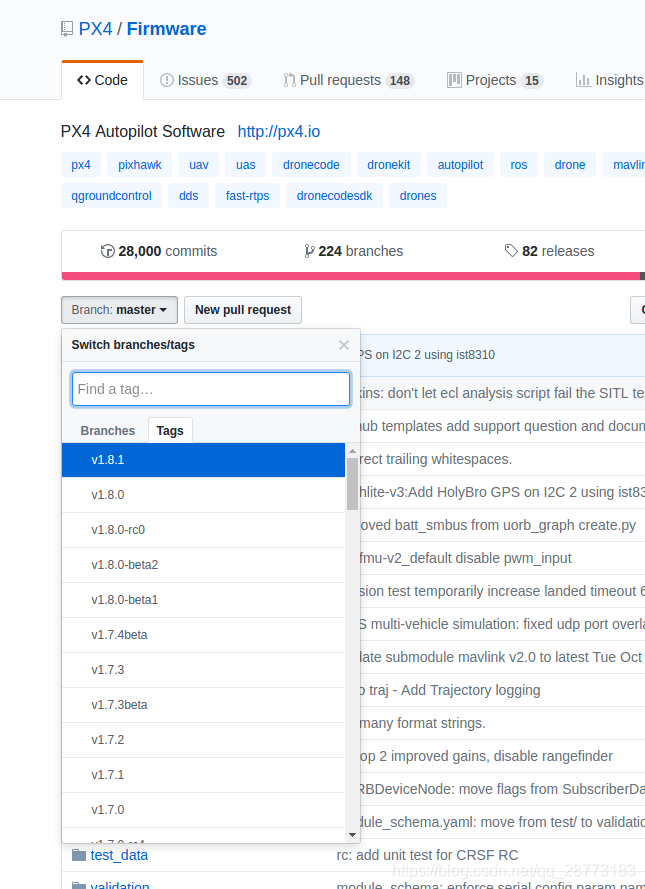
我下载的是V1.80版本的,终端执行命令:
mkdir -p ~/src
cd ~/src
git clone -b v1.8.0 https://github.com/PX4/Firmware.git
cd Firmware
git submodule update --init --recursive
这里的mkdir -p是创建目录,-p参数是为了当所创建目录存在时,不会报错.之后已经配置过的环境不用重新配置,直接编译:
make px4fmu-v5_default

在下载过程中会出现RPC和过早结束(EOF)的错误,不用害怕,可以增加git的缓存,然后继续执行git clone命令,多下几次就可以了.
- 什么是RPC
- 增加git缓存指令:
git config --global http.postBuffer 1048576000 - 出现过早结束错误时,继续执行:
git submodule update --init --recursive
上传固件的三种方式
上传固件主要有地面战在线,地面战离线和命令行方式,在线方式很简单,命令行方式执行:
make px4fmu-v2_default upload
当然,你可以选择自己需要的代码版本
地面站离线的方式主要是找到编译好的固件,在/src/Firmware/build文件夹下找到.px4文件,一般可以用find命令在指定文件夹下找到:find命令使用方法

参考资料
- RPC报错
- 下载指定版本固件
- px4中git相关
- TCP/IP HTTP RPC等的区别
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)