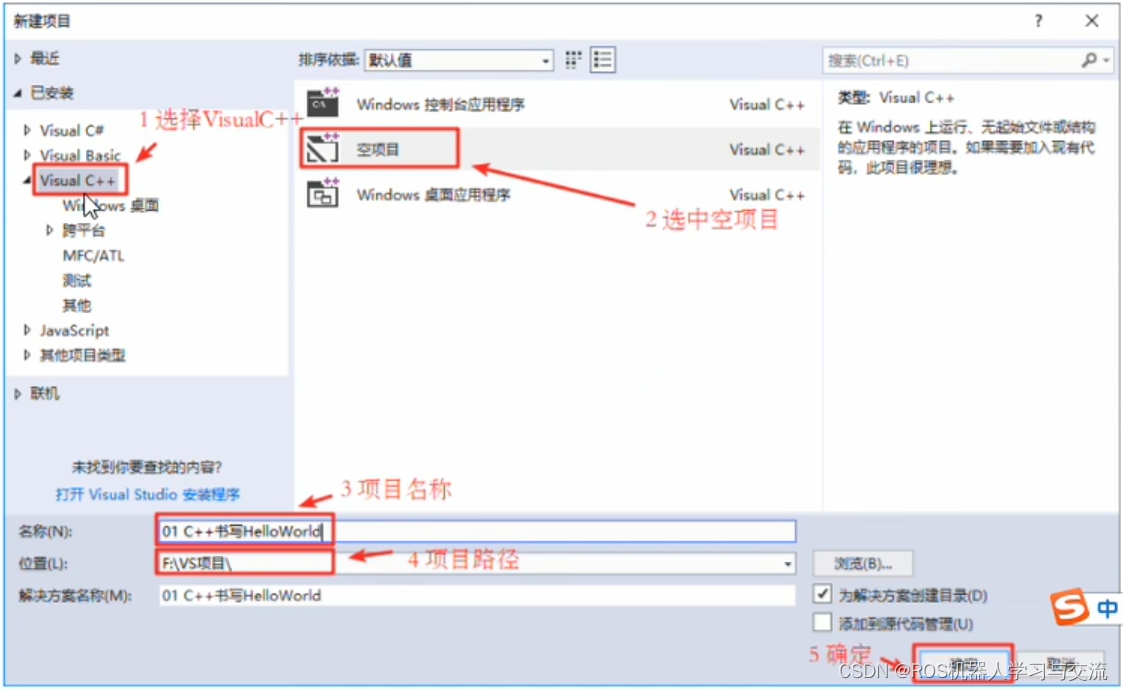
1、打开软件,选怎文件 2、点击选择Visual C++下的空项目,设置文件名称和保存路径
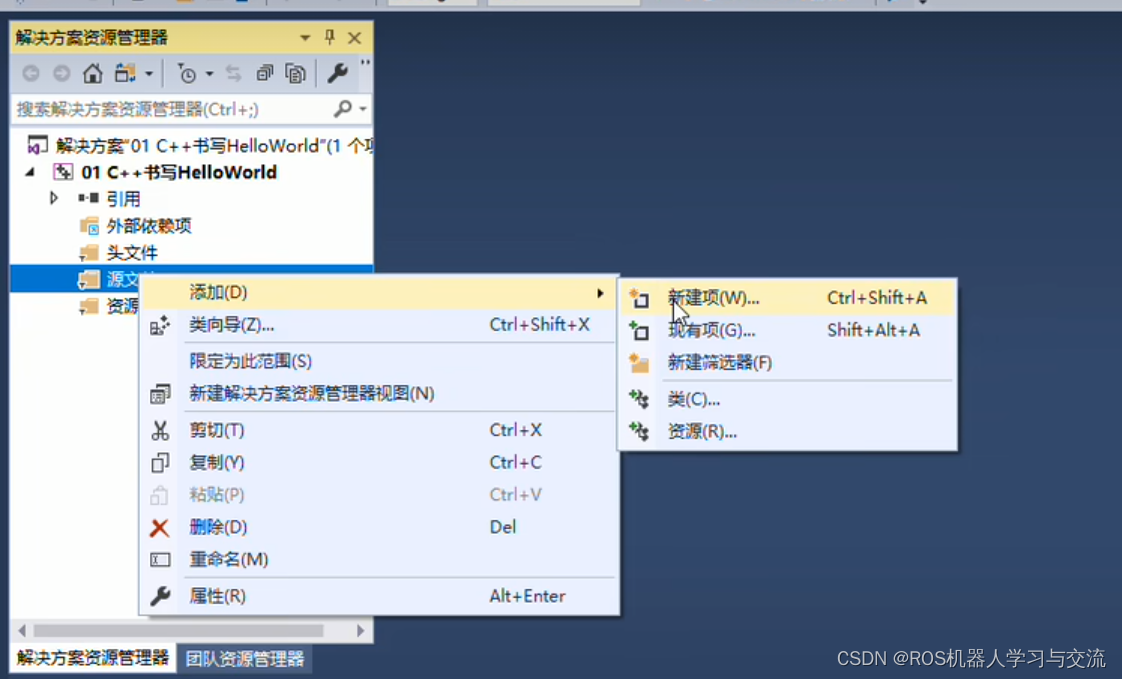
3、添加cpp源文件,选择左侧源文件——>添加——>新建项
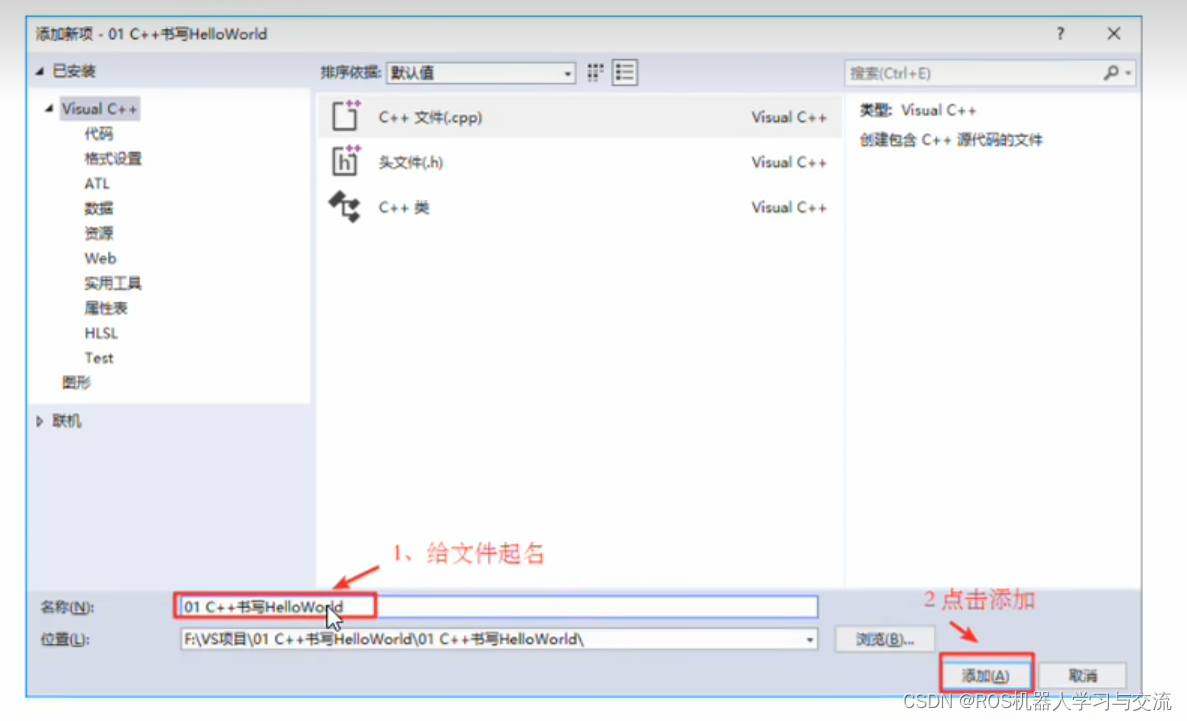
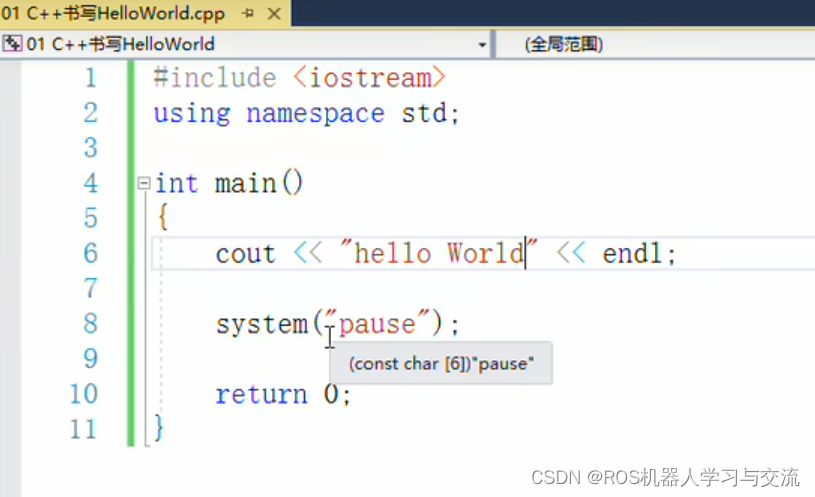
4、选择CPP文件,设置名字并且保存 5、写入代码,f5编译运行