BN880 GPS u-center_v22.07工具配置方法
- 1. 源由
- 2. 分析
- 3. 自我实验
- 3.1 测试现象
- 3.2 u-center_v22.07工具
- 3.3 波特率验证
- 3.4 重新配置
- 3.4.1 PRT (Ports)
- 3.4.2 PMS (Power Management Set)
- 3.4.3 RATE (Rates)
- 3.4.4 GNSS (GNSS Config)
- 3.4.5 CFG (Configuration)
- 3.4.6 常规配置输出
- 3.5 BN880 GPS优化
-
- 4. 对比测试
- 5. 总结
- 6. 参考资料
1. 源由
ArduPilot飞控之DIY-F450计划使用了BN880 GPS模块,但是发现一个非常奇怪的现象。
- 在阳台上(相对天空半球开放)定位效果超级差;
- 冷上电半天也无法定位,最好的一次45分钟后发现Mission Planner上显示3D定位;
- 将模块拆下来,通过USB串口板连接DEBUG;
USB串口板灯闪烁,表明有TTL电平波动(存在串口消息);
使用u-center_v22.07工具无法看到串口信息;
使用sscom32串口工具,可以报文,但是不符合NMEA/UBX报文格式;
- 模块发热(不烫)
2. 分析
从模块外在现象分析如下,但是这里有几个非常头疼,且存疑的问题:
- 模块指示灯工作正常
- 模块确实也曾经3D定位成功过一次(虽然耗时比较长)
- 串口有TTL电平波动,有规律的输出信息(虽然报文二进制不对)
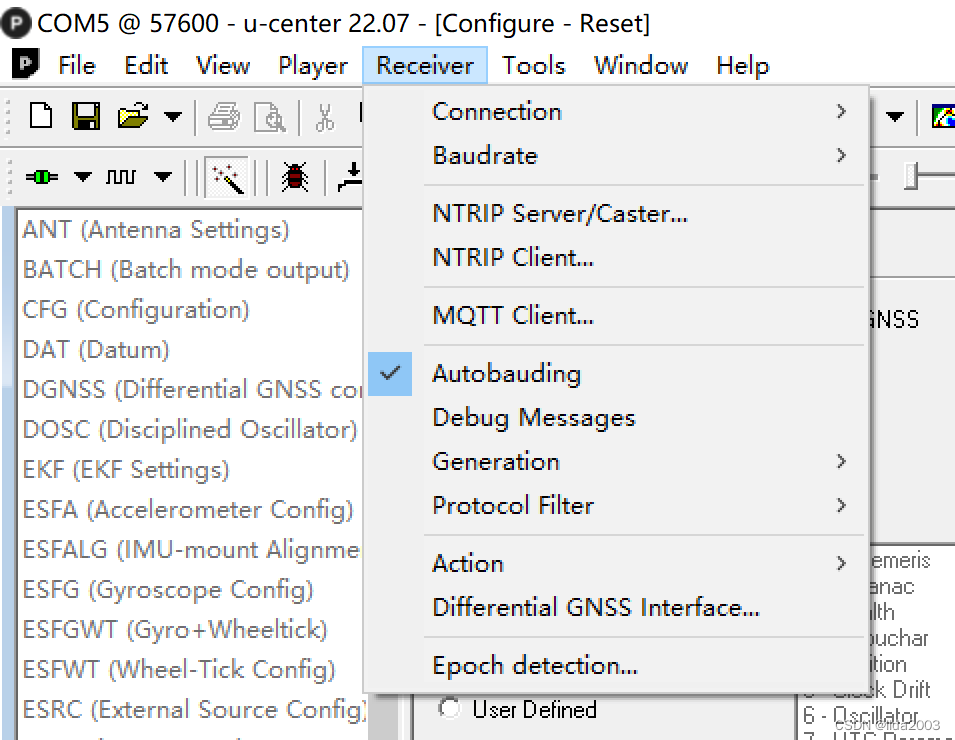
- u-center_v22.07工具中的【Autobauding】自动侦测串口波特率,貌似无法锁定
鉴于模块长时间存放,可能内部配置参数问题导致工作不正常

虽然,搜索了网上的一些对BN880 GPS模块的配置方法,但是始终无法看到期望的效果。
鉴于上述情况,打算两个方向推进:
- 技术支持:通过厂家客服、技术来确认问题源由
- 自我实验:重点是看到正确的报文格式
注:技术支持反馈需要空旷区域测试,窗台上通常会搜不到;后面针对这个做了M8N模块的对比测试。
3. 自我实验
3.1 测试现象
经过试验,打开Packet Console/Binary Console/Text Console/在9600/38400 bps波特率下,都看不到数据。
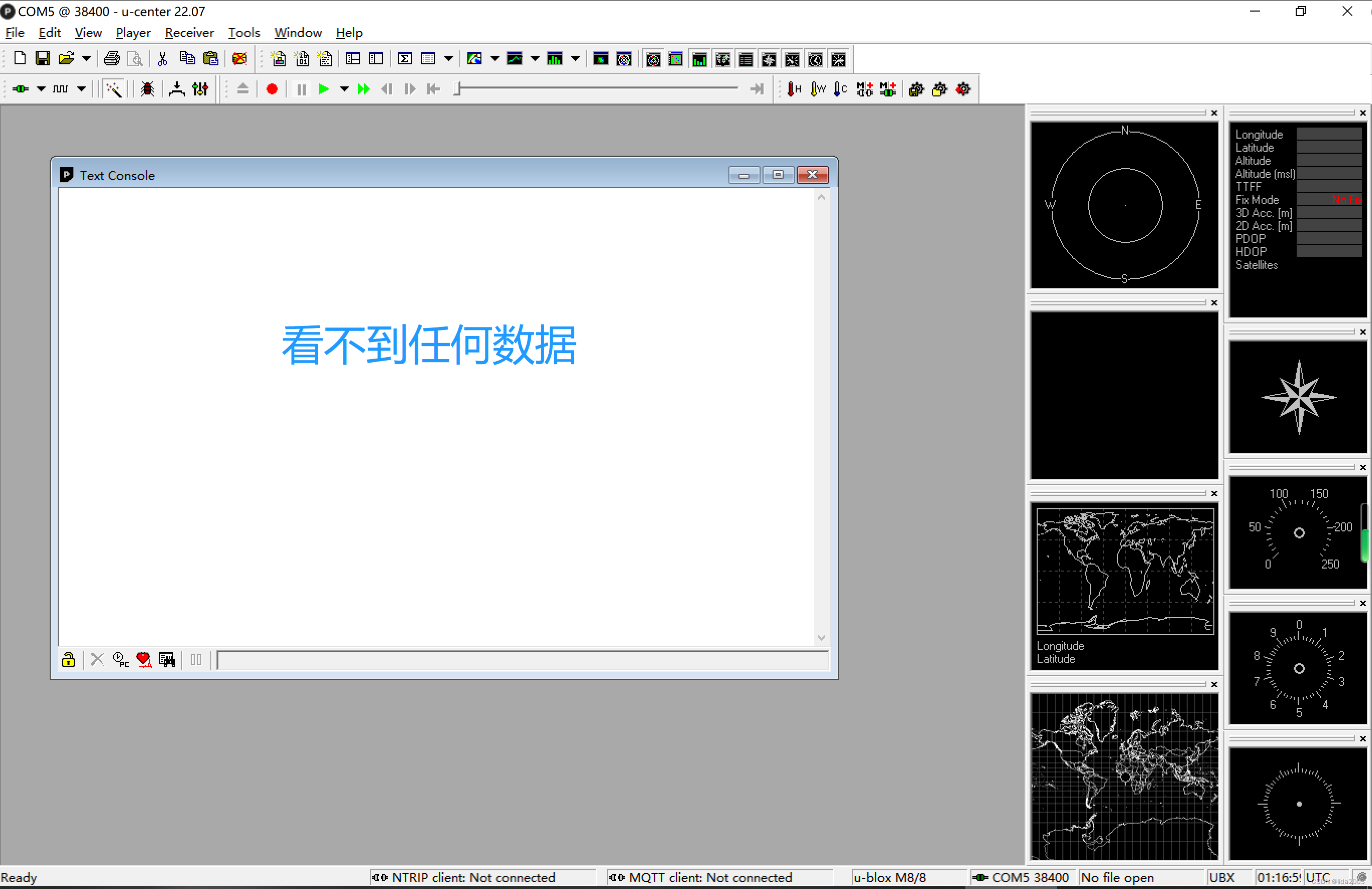 从上图右下角看,貌似u-center_v22.07工具识别是UBX协议。
从上图右下角看,貌似u-center_v22.07工具识别是UBX协议。
3.2 u-center_v22.07工具
u-center_v22.07工具可以从官网下载,使用指南可以详细看下,简单的可以看下下面这个视频,就知道大致怎么来看UBX binary protocol了。
UBX binary protocol, extra tips (arduino)
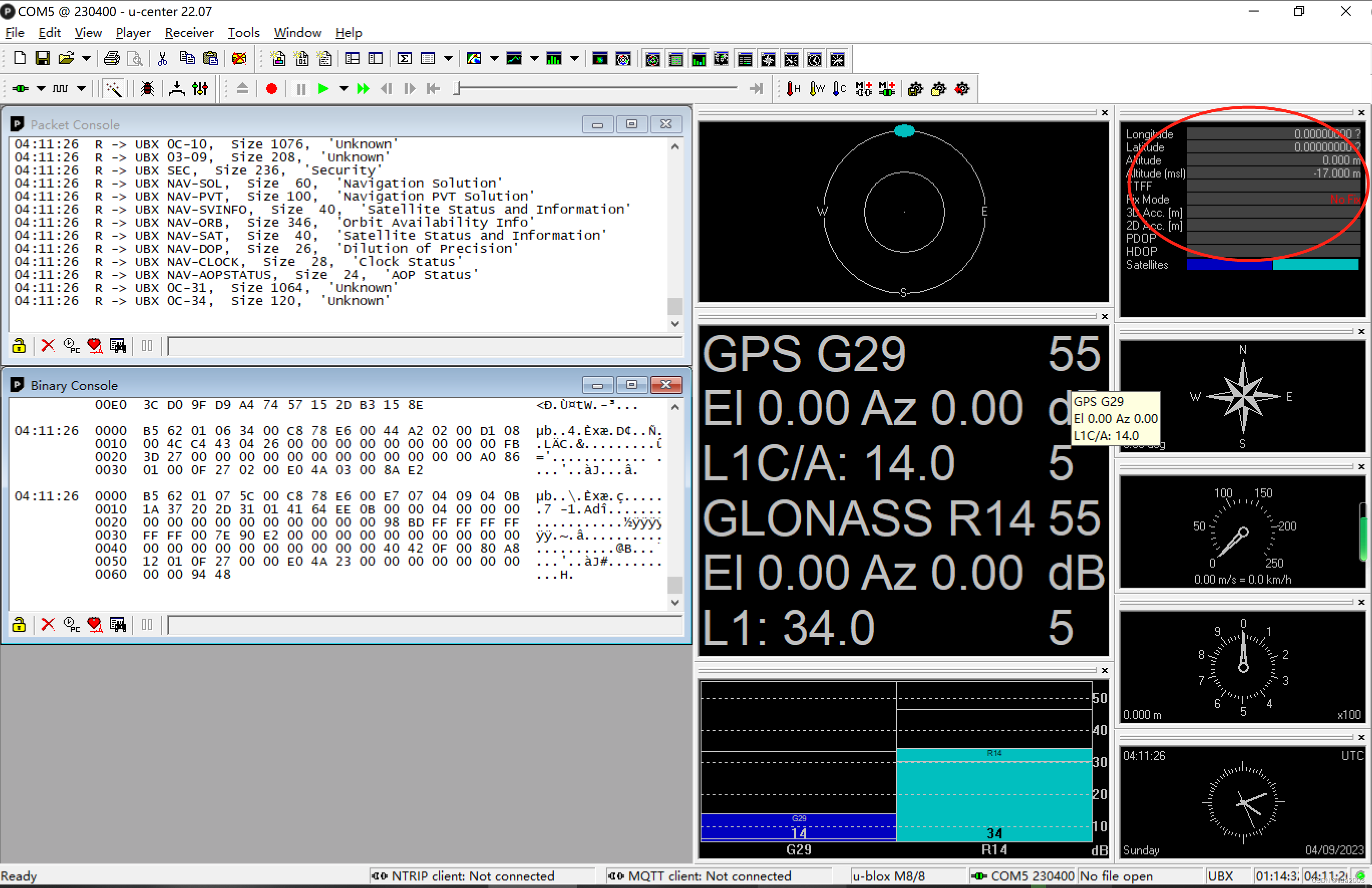
从3.1章节,我们发现貌似识别协议是UBX,每个报文打头的应该是hex(B5),如果通过切换波特率,能看到B5,那么就证明波特率设置正确了。
3.3 波特率验证
接下来就是按个尝试波特,然后看packet是否有hex(B5)的报文输出。
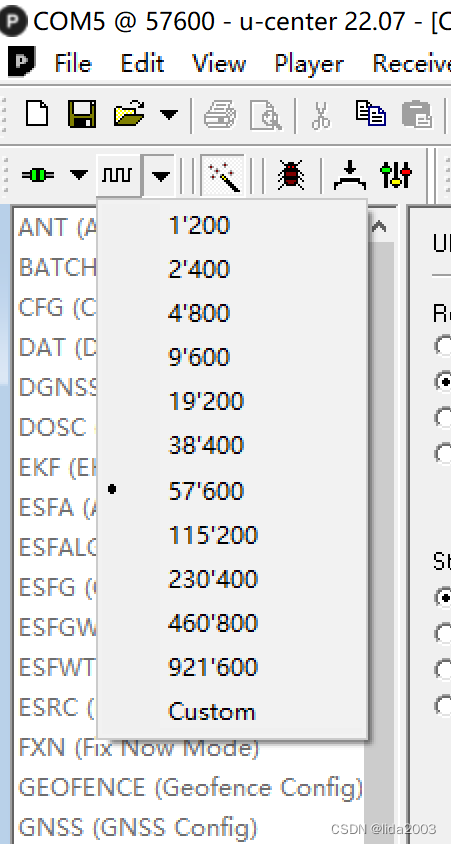
经多次尝试后发现:230400 bps 波特率的时候,报文出来了,但是依然长时间(> 1小时)无法定位。
3.4 重新配置
根据How To Optimize GPS Receiver Settings in U-Center To Get More Satellite Locks,调整参数配置如下:
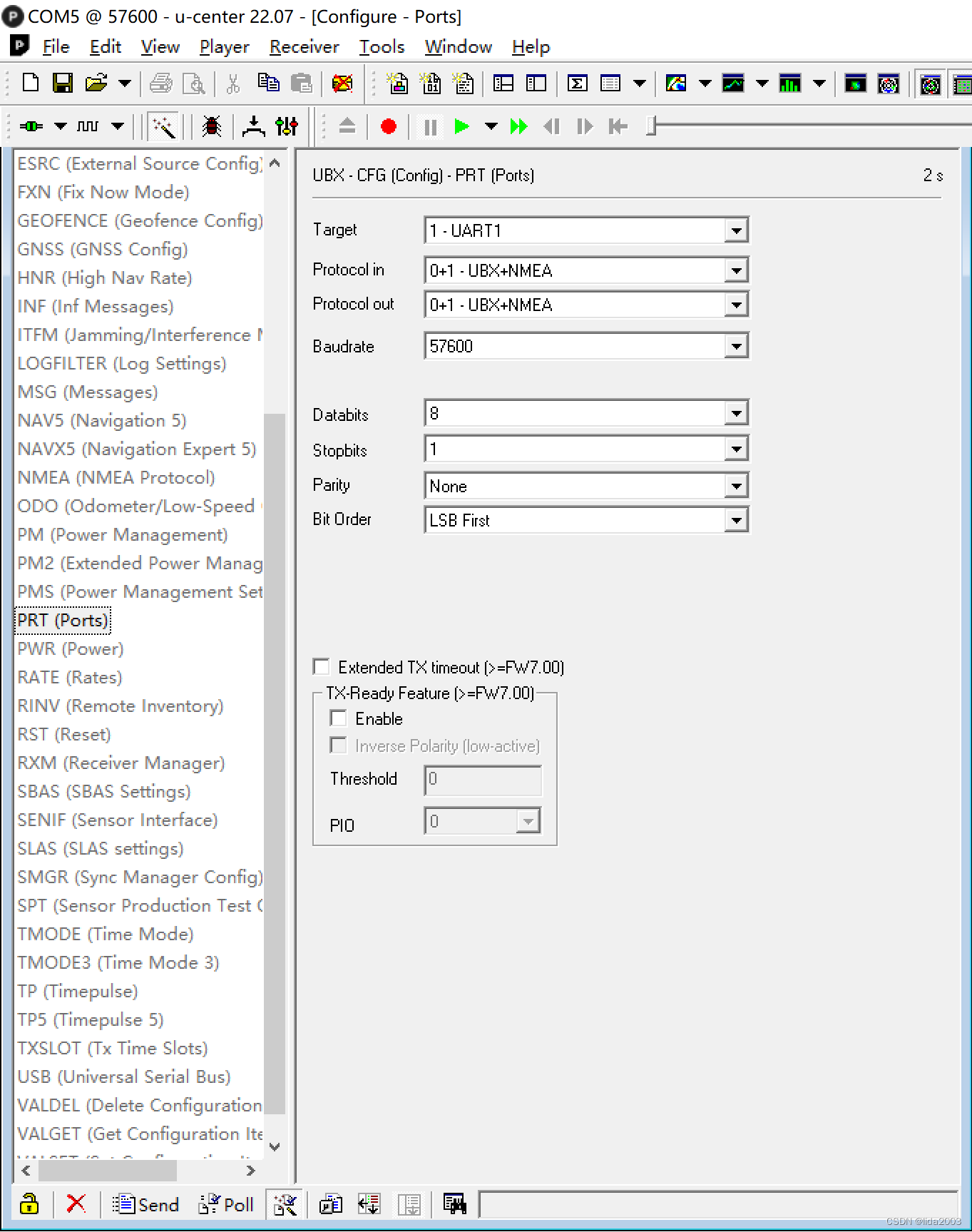
3.4.1 PRT (Ports)
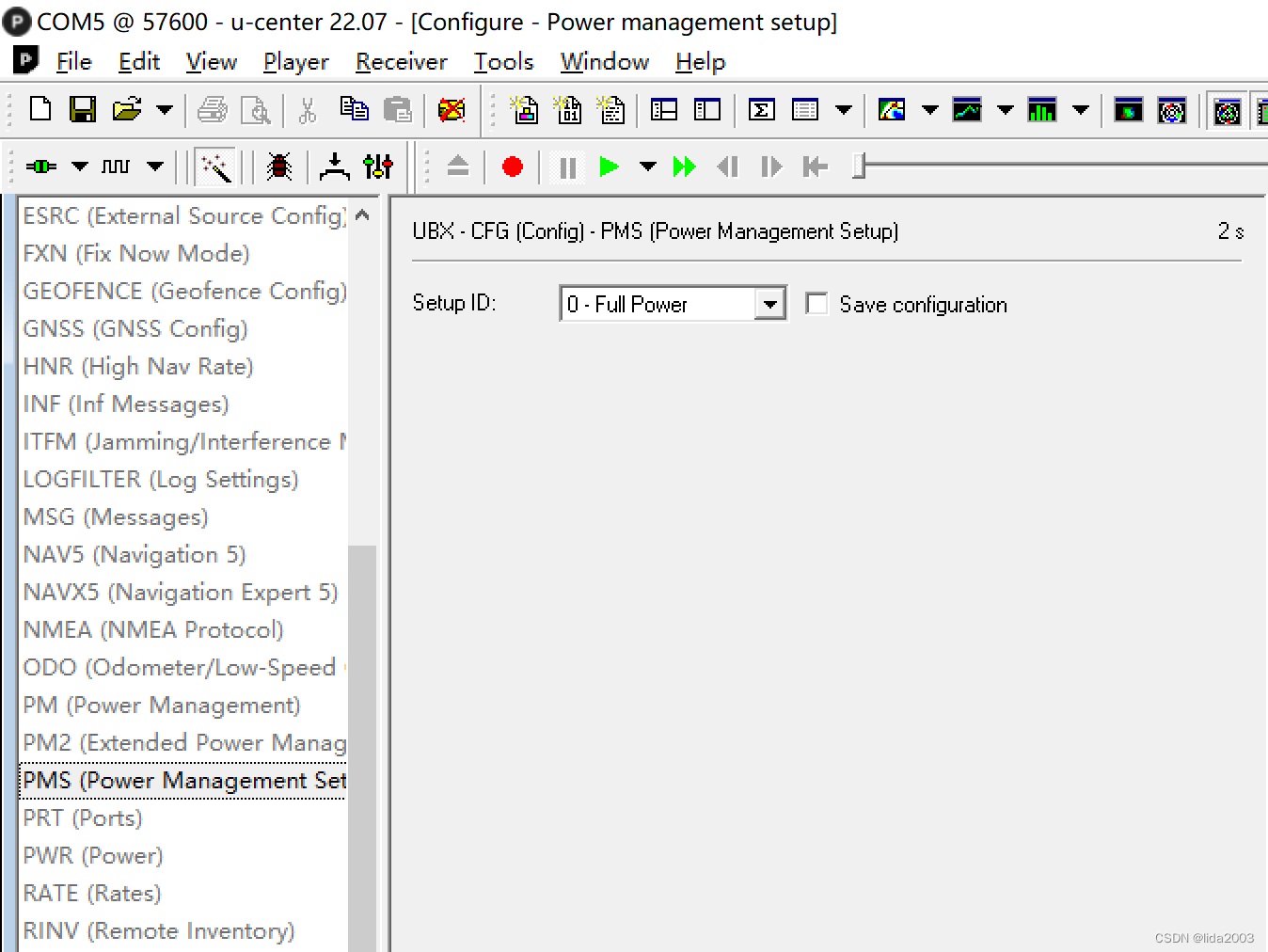
3.4.2 PMS (Power Management Set)
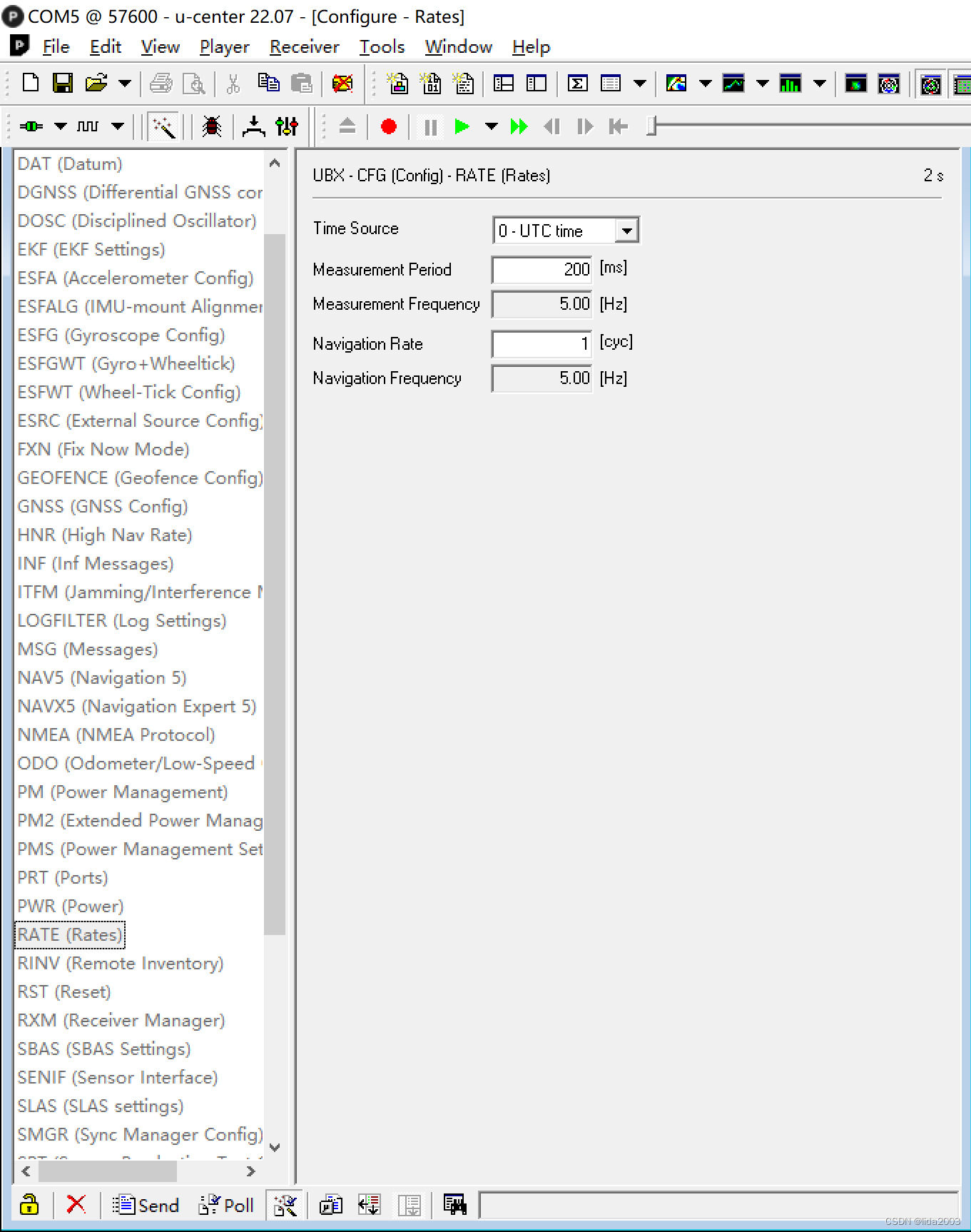
3.4.3 RATE (Rates)
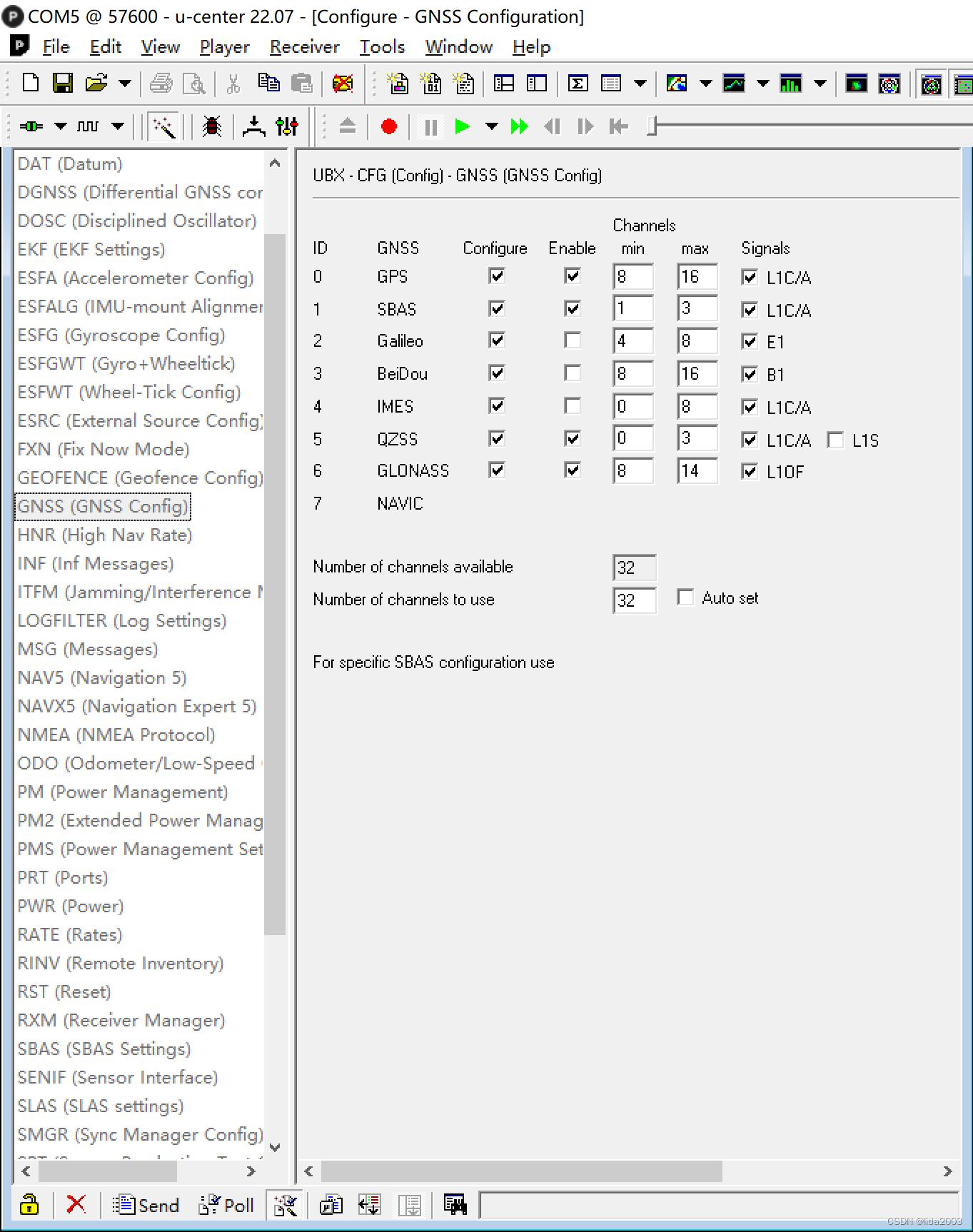
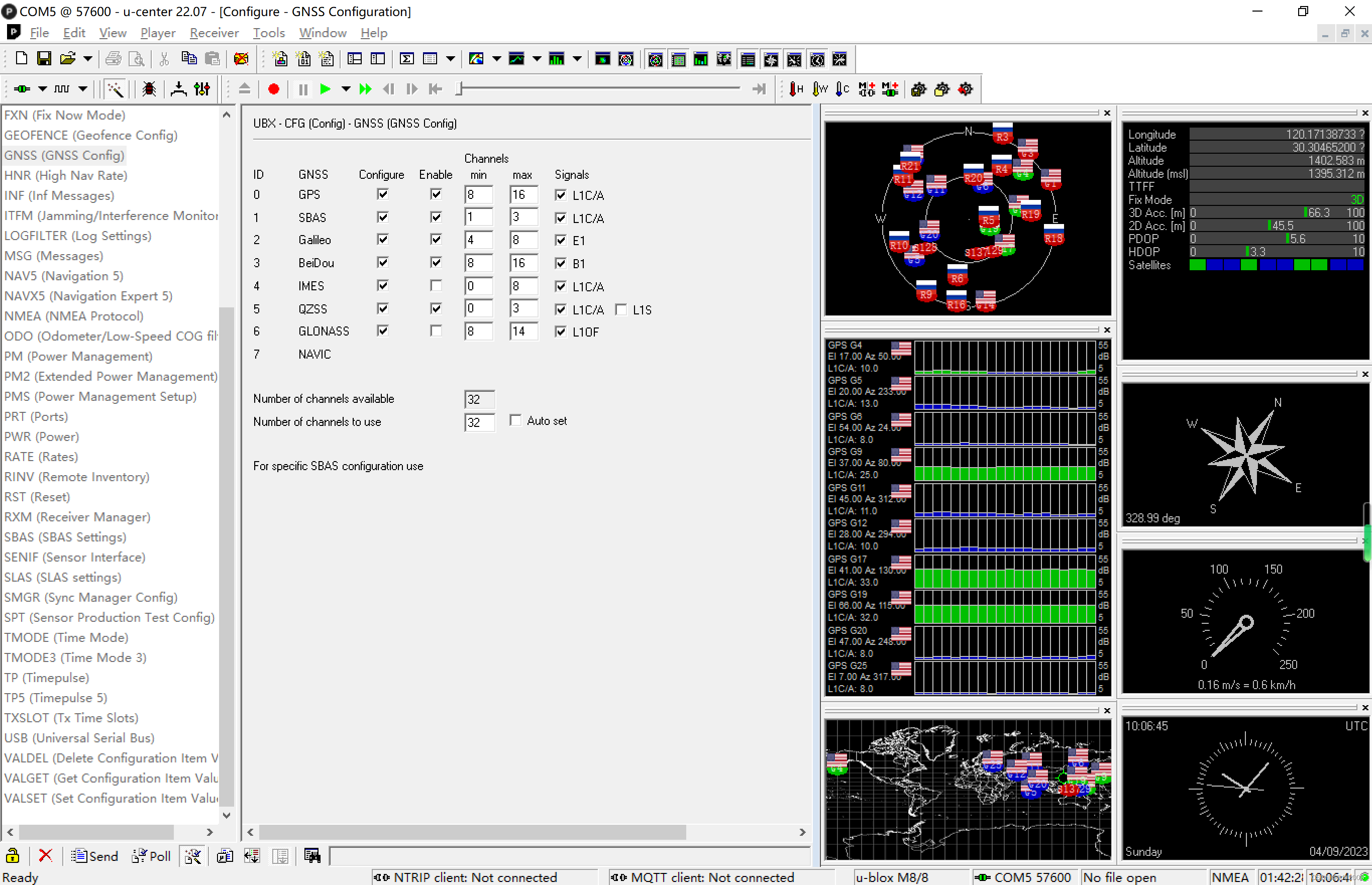
3.4.4 GNSS (GNSS Config)
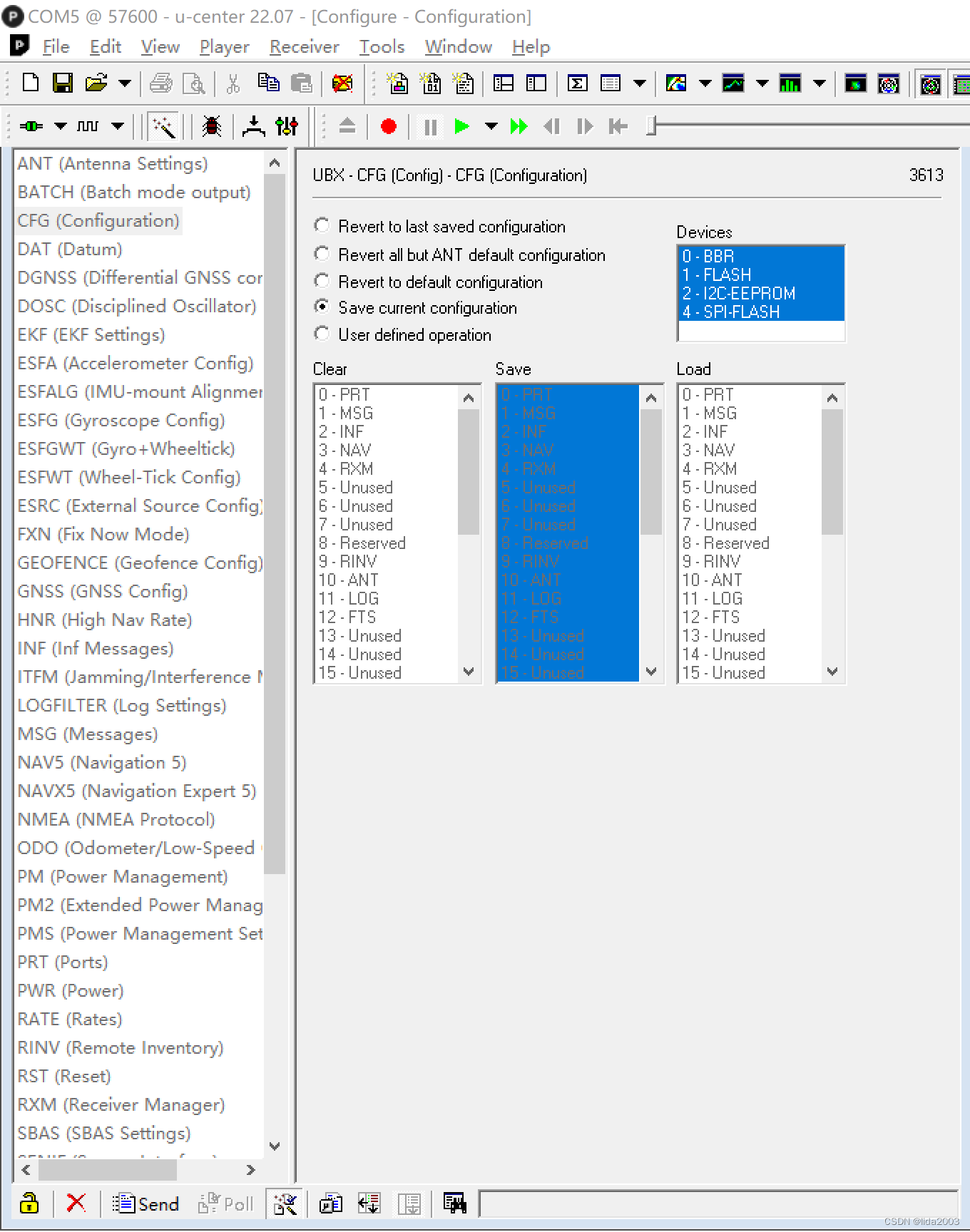
3.4.5 CFG (Configuration)
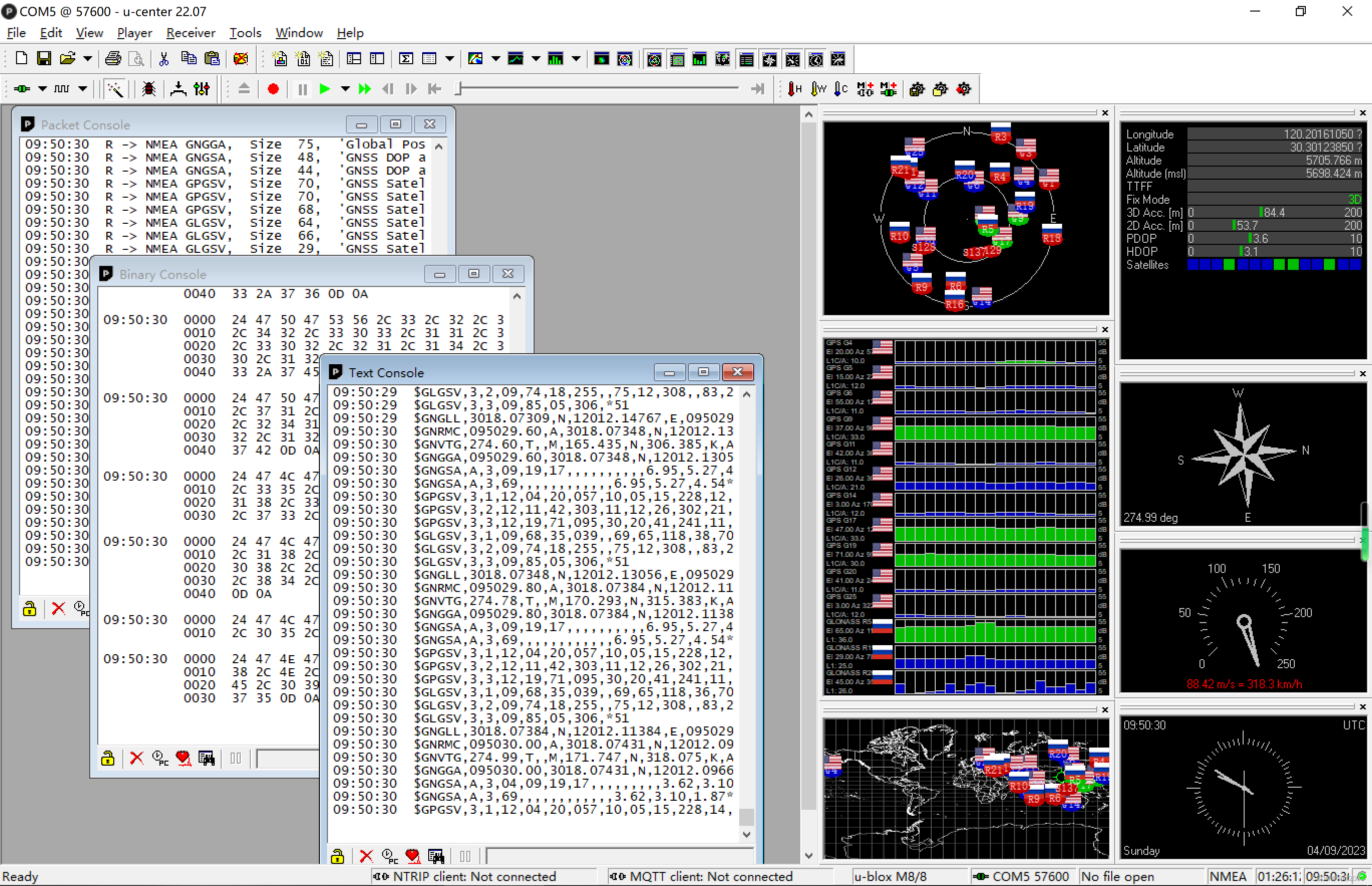
3.4.6 常规配置输出
3.5 BN880 GPS优化

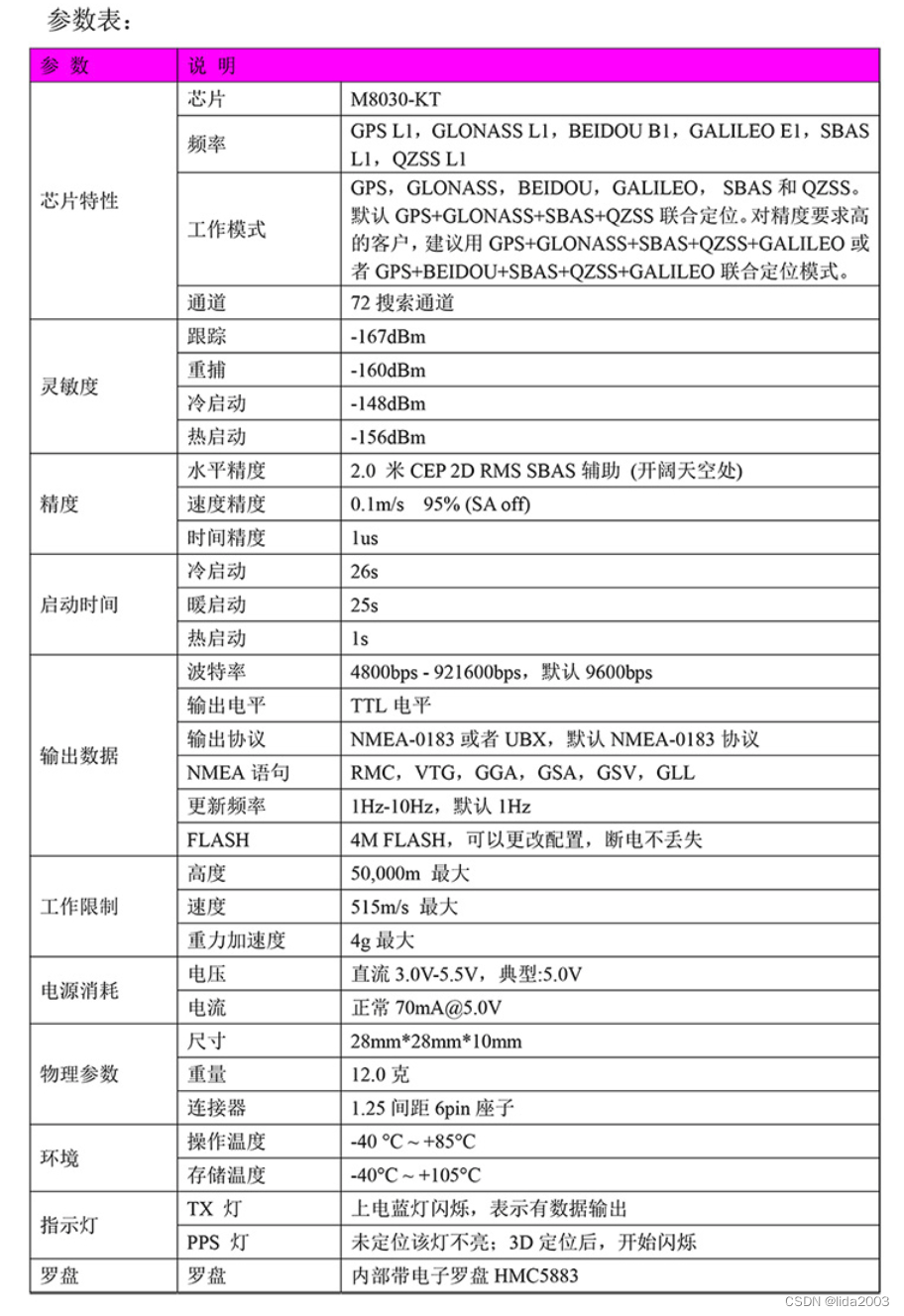
3.5.1 模块规格
3.5.2 优化配置输出
4. 对比测试
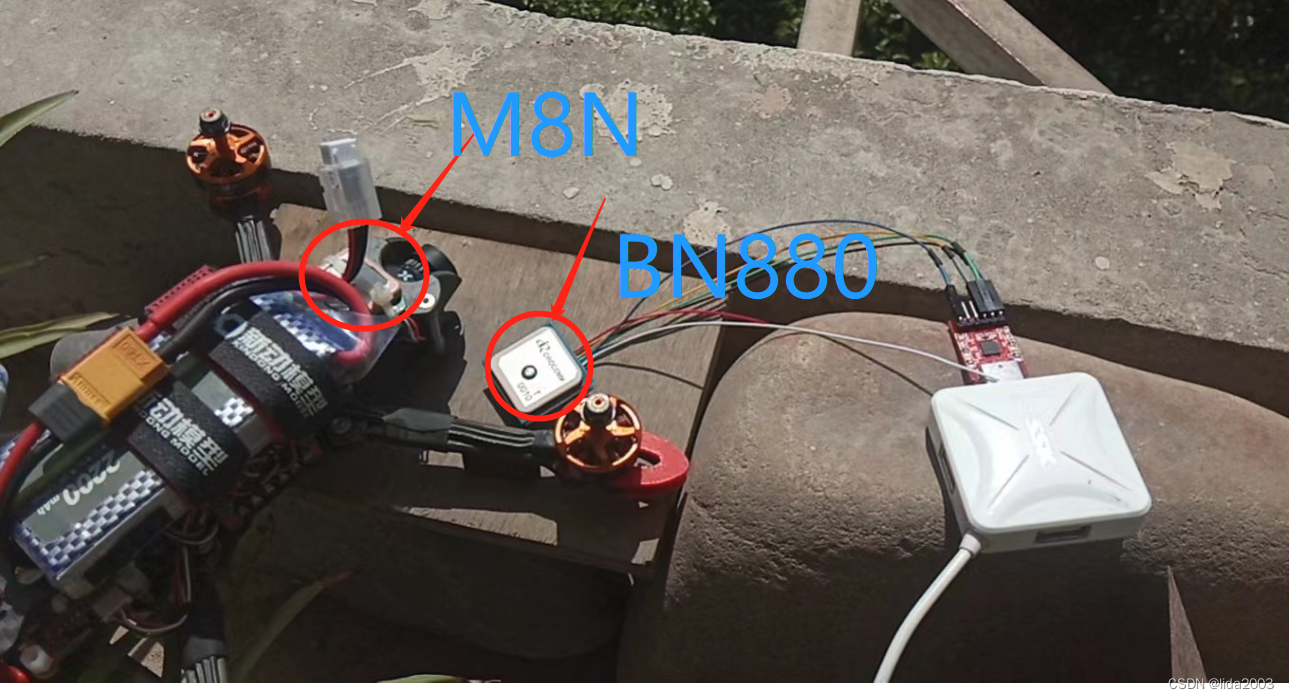
- 同一时刻
- 同一位置
- 30分钟测试
- M8N 6分钟,锁定5颗星(BF OSD显示),持续锁定;
- BN880 8分钟3D锁定,但是9分钟又掉了定位,后续一直没有定位(u-center显示);
5. 总结
综上所述,回顾之前的问题,可能存在问题如下:
- BN880模块配置可能存在异常
- 在尝试调整配置的时候,波特率被修改为230400 bps
- 测试的BN880不如M8N的定位能力强
最后,出现了波特率、配置都异常。不过,经过“自我实验”初步已经定位问题,并根据规格书进行了优化。
6. 参考资料
【1】ArduPilot飞控之DIY-F450计划
【2】How To Optimize GPS Receiver Settings in U-Center To Get More Satellite Locks
【3】U-Center GNSS evaluation software for Windows
【4】U-Center User Guide
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)