ArduPilot飞控之ubuntu22.04-Gazebo模拟
- 1. 源由
- 2. Gazebo安装
- 2.1 ubuntu22.04系统更新
- 2.2 安装Gazebo Garden
- 2.3 安装ArduPilot Gazebo插件
- 2.3.1 基础库安装
- 2.3.2 源代码编译
- 2.3.3 配置插件
- 2.4 测试Gazebo Garden
- 3. ArduPilot SITL + Gazebo模拟
- 3.1 Gazebo Garden模拟环境
- 3.2 ArduPilot SITL仿真环境
- 3.3 ArduPilot SITL + Gazebo 测试视频
- 4. 参考资料
- 5. 补充资料
-
1. 源由
Gazebo是一款知名且备受业界推崇的模拟器,已被广泛用于地面、海洋和太空机器人的许多模拟挑战,包括DARPA机器人竞赛。
这里简单介绍如何使用最新一代Gazebo作为ArduPilot Rover、Coper和Plane的外部模拟器。为后续模拟器调试奠定基础。
2. Gazebo安装
2.1 ubuntu22.04系统更新
$ sudo apt-get update
$ sudo apt-get install lsb-release wget gnupg
2.2 安装Gazebo Garden
$ sudo wget https://packages.osrfoundation.org/gazebo.gpg -O /usr/share/keyrings/pkgs-osrf-archive-keyring.gpg
$ echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/pkgs-osrf-archive-keyring.gpg] http://packages.osrfoundation.org/gazebo/ubuntu-stable $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/gazebo-stable.list > /dev/null
$ sudo apt-get update
$ sudo apt-get install gz-garden
2.3 安装ArduPilot Gazebo插件
2.3.1 基础库安装
$ sudo apt install libgz-sim7-dev rapidjson-dev
2.3.2 源代码编译
$ git clone git@github.com:ArduPilot/ardupilot_gazebo.git
$ cd ardupilot_gazebo
$ mkdir build && cd build
$ cmake .. -DCMAKE_BUILD_TYPE=RelWithDebInfo
$ make -j4
2.3.3 配置插件
可选择手工或者脚本配置方法
$ export GZ_SIM_SYSTEM_PLUGIN_PATH=<ardupilot_gazebo path>/build:$GZ_SIM_SYSTEM_PLUGIN_PATH
$ export GZ_SIM_RESOURCE_PATH=<ardupilot_gazebo path>/models:$HOME/ardupilot_gazebo/worlds:$GZ_SIM_RESOURCE_PATH
or
$ echo 'export GZ_SIM_SYSTEM_PLUGIN_PATH=$HOME/ardupilot_gazebo/build:${GZ_SIM_SYSTEM_PLUGIN_PATH}' >> ~/.bashrc
$ echo 'export GZ_SIM_RESOURCE_PATH=$HOME/ardupilot_gazebo/models:$HOME/ardupilot_gazebo/worlds:${GZ_SIM_RESOURCE_PATH}' >> ~/.bashrc
这里笔者采用脚本配置方法:
$ pwd
/home/daniel/Work/ardupilot_gazebo
$ echo 'export GZ_SIM_SYSTEM_PLUGIN_PATH=/home/daniel/Work/ardupilot_gazebo/build:${GZ_SIM_SYSTEM_PLUGIN_PATH}' >> ~/.bashrc
$ echo 'export GZ_SIM_RESOURCE_PATH=/home/daniel/Work/ardupilot_gazebo/models:/home/daniel/Work/ardupilot_gazebo/worlds:${GZ_SIM_RESOURCE_PATH}' >> ~/.bashrc
$ . ~/.profile
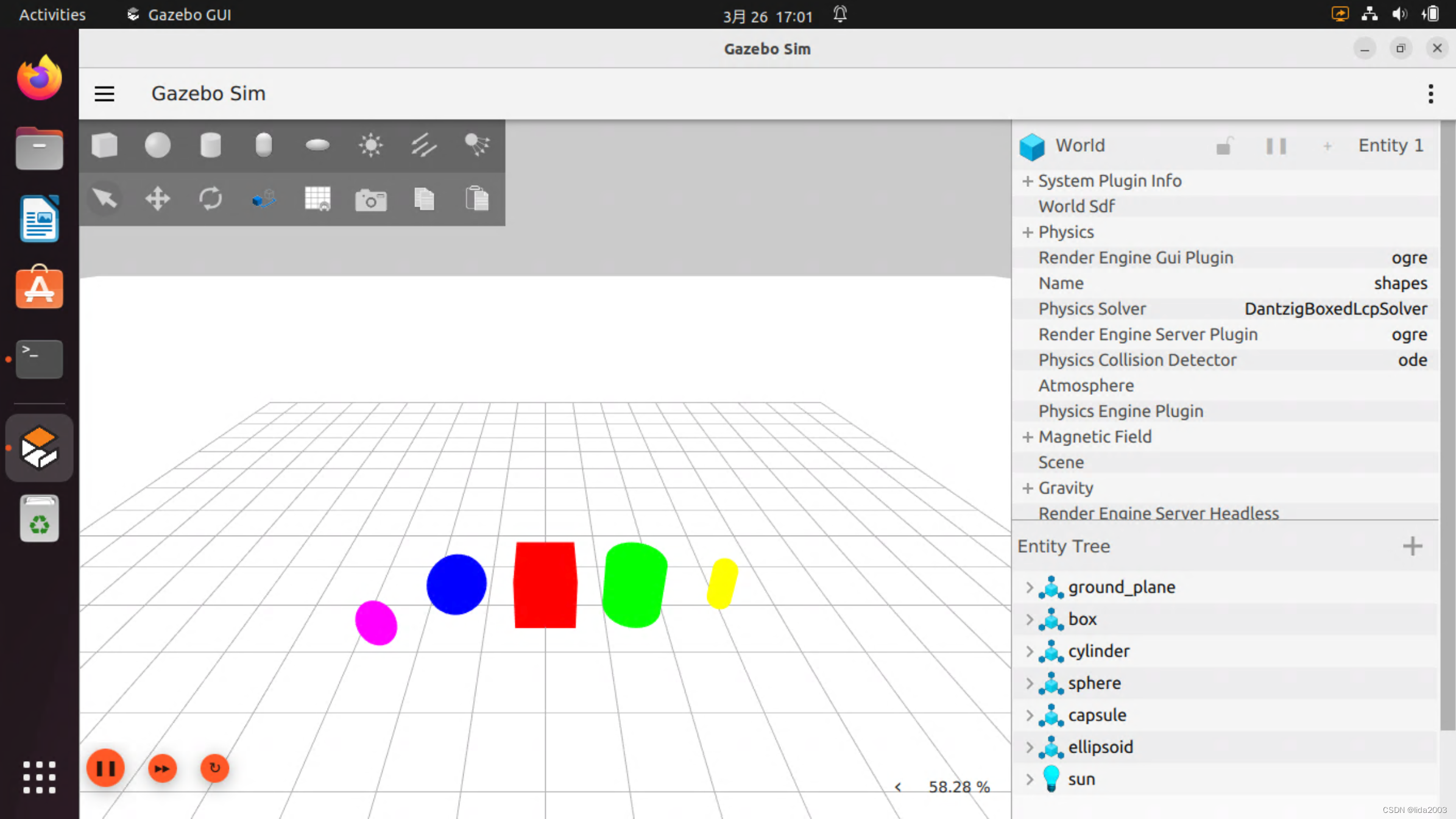
2.4 测试Gazebo Garden
$ gz sim -v4 -r shapes.sdf
[Msg] Gazebo Sim GUI v7.4.0
[Dbg] [gz.cc:162] Subscribing to [/gazebo/starting_world].
[Dbg] [gz.cc:164] Waiting for a world to be set from the GUI...
[Dbg] [Gui.cc:260] Waiting for subscribers to [/gazebo/starting_world]...
[Msg] Received world [shapes.sdf] from the GUI.
[Dbg] [gz.cc:168] Unsubscribing from [/gazebo/starting_world].
[Msg] Gazebo Sim Server v7.4.0
[Msg] Loading SDF world file[/usr/share/gz/gz-sim7/worlds/shapes.sdf].
Warning: Ignoring XDG_SESSION_TYPE=wayland on Gnome. Use QT_QPA_PLATFORM=wayland to run on Wayland anyway.
[Msg] Serving entity system service on [/entity/system/add]
[Msg] Loaded level [3]
[Msg] No systems loaded from SDF, loading defaults
[Dbg] [ServerConfig.cc:1042] Loaded (3) plugins from file [/home/daniel/.gz/sim/7/server.config]
[Dbg] [Physics.cc:869] Loaded [gz::physics::dartsim::Plugin] from library [/usr/lib/x86_64-linux-gnu/gz-physics-6/engine-plugins/libgz-physics-dartsim-plugin.so]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::Physics] for entity [1]
[Msg] Create service on [/world/shapes/create]
[Msg] Remove service on [/world/shapes/remove]
[Msg] Pose service on [/world/shapes/set_pose]
[Msg] Pose service on [/world/shapes/set_pose_vector]
[Msg] Light configuration service on [/world/shapes/light_config]
[Msg] Physics service on [/world/shapes/set_physics]
[Msg] SphericalCoordinates service on [/world/shapes/set_spherical_coordinates]
[Msg] Enable collision service on [/world/shapes/enable_collision]
[Msg] Disable collision service on [/world/shapes/disable_collision]
[Msg] Material service on [/world/shapes/visual_config]
[Msg] Material service on [/world/shapes/wheel_slip]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::UserCommands] for entity [1]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::SceneBroadcaster] for entity [1]
[Msg] Serving world controls on [/world/shapes/control], [/world/shapes/control/state] and [/world/shapes/playback/control]
[Msg] Serving GUI information on [/world/shapes/gui/info]
[Msg] World [shapes] initialized with [default_physics] physics profile.
[Msg] Serving world SDF generation service on [/world/shapes/generate_world_sdf]
[Msg] Serving world names on [/gazebo/worlds]
[Msg] Resource path add service on [/gazebo/resource_paths/add].
[Msg] Resource path get service on [/gazebo/resource_paths/get].
[Msg] Resource path resolve service on [/gazebo/resource_paths/resolve].
[Msg] Resource paths published on [/gazebo/resource_paths].
[Msg] Server control service on [/server_control].
[Msg] Found no publishers on /stats, adding root stats topic
[Msg] Found no publishers on /clock, adding root clock topic
[Dbg] [SimulationRunner.cc:513] Creating PostUpdate worker threads: 2
[Dbg] [SimulationRunner.cc:524] Creating postupdate worker thread (0)
[Dbg] [Application.cc:96] Initializing application.
[Dbg] [Application.cc:122] Qt using OpenGL graphics interface
[Msg] Serving scene information on [/world/shapes/scene/info]
[Msg] Serving graph information on [/world/shapes/scene/graph]
[Msg] Serving full state on [/world/shapes/state]
[Msg] Serving full state (async) on [/world/shapes/state_async]
[Msg] Publishing scene information on [/world/shapes/scene/info]
[Msg] Publishing entity deletions on [/world/shapes/scene/deletion]
[Msg] Publishing state changes on [/world/shapes/state]
[Msg] Publishing pose messages on [/world/shapes/pose/info]
[Msg] Publishing dynamic pose messages on [/world/shapes/dynamic_pose/info]
[GUI] [Dbg] [Application.cc:596] Create main window
[GUI] [Wrn] [Application.cc:845] [QT] qrc:/qml/StyleDialog.qml:112:3: QML Connections: Implicitly defined onFoo properties in Connections are deprecated. Use this syntax instead: function onFoo(<arguments>) { ... }
[GUI] [Wrn] [Application.cc:845] [QT] qrc:/qml/StyleDialog.qml:105:3: QML Connections: Implicitly defined onFoo properties in Connections are deprecated. Use this syntax instead: function onFoo(<arguments>) { ... }
[GUI] [Wrn] [Application.cc:845] [QT] qrc:/qml/StyleDialog.qml:98:3: QML Connections: Implicitly defined onFoo properties in Connections are deprecated. Use this syntax instead: function onFoo(<arguments>) { ... }
[GUI] [Wrn] [Application.cc:845] [QT] qrc:qml/Main.qml:102:3: QML Connections: Implicitly defined onFoo properties in Connections are deprecated. Use this syntax instead: function onFoo(<arguments>) { ... }
[GUI] [Wrn] [Application.cc:845] [QT] qrc:/qml/PluginMenu.qml:27:3: QML Connections: Implicitly defined onFoo properties in Connections are deprecated. Use this syntax instead: function onFoo(<arguments>) { ... }
[GUI] [Dbg] [PathManager.cc:67] Requesting resource paths through [/gazebo/resource_paths/get]
[GUI] [Wrn] [Application.cc:845] [QT] file::/Gazebo/GazeboDrawer.qml:241:3: QML Connections: Implicitly defined onFoo properties in Connections are deprecated. Use this syntax instead: function onFoo(<arguments>) { ... }
[GUI] [Dbg] [PathManager.cc:56] Received resource paths.
[GUI] [Wrn] [Application.cc:845] [QT] file::/Gazebo/GazeboDrawer.qml:147:3: QML Dialog: Binding loop detected for property "implicitHeight"
[GUI] [Wrn] [Application.cc:845] [QT] file::/Gazebo/GazeboDrawer.qml:147:3: QML Dialog: Binding loop detected for property "implicitHeight"
[GUI] [Dbg] [Gui.cc:340] GUI requesting list of world names. The server may be busy downloading resources. Please be patient.
[GUI] [Dbg] [Gui.cc:398] Requesting GUI from [/world/shapes/gui/info]...
[GUI] [Dbg] [GuiRunner.cc:149] Requesting initial state from [/world/shapes/state]...
[GUI] [Msg] Loading config [/home/daniel/.gz/sim/7/gui.config]
[GUI] [Dbg] [Application.cc:453] Loading plugin [MinimalScene]
[Dbg] [EntityComponentManager.cc:1619] Updated state thread iterators: 2 threads processing around 15 entities each.
[Wrn] [Component.hh:144] Trying to serialize component with data type [N3sdf3v135WorldE], which doesn't have `operator<<`. Component will not be serialized.
[Wrn] [Model.hh:69] Skipping serialization / deserialization for models with //pose/@relative_to attribute.
[GUI] [Dbg] [MinimalScene.cc:657] Creating gz-rendering interface for OpenGL
[GUI] [Dbg] [MinimalScene.cc:657] Creating gz-rendering interface for OpenGL
[GUI] [Dbg] [MinimalScene.cc:813] Creating render thread interface for OpenGL
[GUI] [Msg] Added plugin [3D View] to main window
[GUI] [Msg] Loaded plugin [MinimalScene] from path [/usr/lib/x86_64-linux-gnu/gz-gui-7/plugins/libMinimalScene.so]
[GUI] [Dbg] [Application.cc:453] Loading plugin [EntityContextMenuPlugin]
[GUI] [Wrn] [Application.cc:845] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:57:5: QML Connections: Implicitly defined onFoo properties in Connections are deprecated. Use this syntax instead: function onFoo(<arguments>) { ... }
[GUI] [Wrn] [Application.cc:845] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:52:3: QML RenderWindowOverlay: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:845] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:67:3: QML EntityContextMenu: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:845] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:52:3: QML RenderWindowOverlay: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:845] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:67:3: QML EntityContextMenu: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:845] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:52:3: QML RenderWindowOverlay: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:845] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:67:3: QML EntityContextMenu: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:845] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:52:3: QML RenderWindowOverlay: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:845] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:67:3: QML EntityContextMenu: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:845] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:52:3: QML RenderWindowOverlay: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:845] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:67:3: QML EntityContextMenu: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:845] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:52:3: QML RenderWindowOverlay: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:845] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:67:3: QML EntityContextMenu: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Msg] Added plugin [Entity Context Menu] to main window
[GUI] [Msg] Loaded plugin [EntityContextMenuPlugin] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libEntityContextMenuPlugin.so]
[GUI] [Dbg] [Application.cc:453] Loading plugin [GzSceneManager]
[GUI] [Msg] Added plugin [Scene Manager] to main window
[GUI] [Msg] Loaded plugin [GzSceneManager] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libGzSceneManager.so]
[GUI] [Dbg] [Application.cc:453] Loading plugin [InteractiveViewControl]
[GUI] [Msg] Camera view controller topic advertised on [/gui/camera/view_control]
[GUI] [Msg] Camera reference visual topic advertised on [/gui/camera/view_control/reference_visual]
[GUI] [Msg] Camera view control sensitivity advertised on [/gui/camera/view_control/sensitivity]
[GUI] [Msg] Added plugin [Interactive view control] to main window
[GUI] [Msg] Loaded plugin [InteractiveViewControl] from path [/usr/lib/x86_64-linux-gnu/gz-gui-7/plugins/libInteractiveViewControl.so]
[GUI] [Dbg] [Application.cc:453] Loading plugin [CameraTracking]
[GUI] [Msg] Added plugin [Camera tracking] to main window
[GUI] [Msg] Loaded plugin [CameraTracking] from path [/usr/lib/x86_64-linux-gnu/gz-gui-7/plugins/libCameraTracking.so]
[GUI] [Dbg] [Application.cc:453] Loading plugin [MarkerManager]
[GUI] [Msg] Listening to stats on [/world/shapes/stats]
[GUI] [Msg] Added plugin [Marker Manager] to main window
[GUI] [Msg] Loaded plugin [MarkerManager] from path [/usr/lib/x86_64-linux-gnu/gz-gui-7/plugins/libMarkerManager.so]
[GUI] [Dbg] [Application.cc:453] Loading plugin [SelectEntities]
[GUI] [Msg] Added plugin [Select entities] to main window
[GUI] [Msg] Loaded plugin [SelectEntities] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libSelectEntities.so]
[GUI] [Dbg] [Application.cc:453] Loading plugin [Spawn]
[GUI] [Wrn] [Application.cc:845] [QT] file::/Spawn/Spawn.qml:32:3: QML Connections: Implicitly defined onFoo properties in Connections are deprecated. Use this syntax instead: function onFoo(<arguments>) { ... }
[GUI] [Msg] Added plugin [Spawn] to main window
[GUI] [Msg] Loaded plugin [Spawn] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libSpawn.so]
[GUI] [Dbg] [Application.cc:453] Loading plugin [VisualizationCapabilities]
[GUI] [Msg] View as transparent service on [/gui/view/transparent]
[GUI] [Msg] View as wireframes service on [/gui/view/wireframes]
[GUI] [Msg] View center of mass service on [/gui/view/com]
[GUI] [Msg] View inertia service on [/gui/view/inertia]
[GUI] [Msg] View collisions service on [/gui/view/collisions]
[GUI] [Msg] View joints service on [/gui/view/joints]
[GUI] [Msg] View frames service on [/gui/view/frames]
[GUI] [Msg] Added plugin [Visualization capabilities] to main window
[GUI] [Msg] Loaded plugin [VisualizationCapabilities] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libVisualizationCapabilities.so]
[GUI] [Dbg] [Application.cc:453] Loading plugin [WorldControl]
[GUI] [Wrn] [Application.cc:845] [QT] file::/WorldControl/WorldControl.qml:30:3: QML Connections: Implicitly defined onFoo properties in Connections are deprecated. Use this syntax instead: function onFoo(<arguments>) { ... }
[GUI] [Msg] Using world control service [/world/shapes/control]
[GUI] [Msg] Listening to stats on [/world/shapes/stats]
[GUI] [Dbg] [WorldControl.cc:250] Using an event to share WorldControl msgs with the server
[GUI] [Msg] Added plugin [World control] to main window
[GUI] [Msg] Loaded plugin [WorldControl] from path [/usr/lib/x86_64-linux-gnu/gz-gui-7/plugins/libWorldControl.so]
[GUI] [Dbg] [Application.cc:453] Loading plugin [WorldStats]
[GUI] [Msg] Listening to stats on [/world/shapes/stats]
[GUI] [Msg] Added plugin [World stats] to main window
[GUI] [Msg] Loaded plugin [WorldStats] from path [/usr/lib/x86_64-linux-gnu/gz-gui-7/plugins/libWorldStats.so]
[GUI] [Dbg] [Application.cc:453] Loading plugin [Shapes]
[GUI] [Msg] Added plugin [Shapes] to main window
[GUI] [Msg] Loaded plugin [Shapes] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libShapes.so]
[GUI] [Dbg] [Application.cc:453] Loading plugin [Lights]
[GUI] [Msg] Added plugin [Lights] to main window
[GUI] [Msg] Loaded plugin [Lights] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libLights.so]
[GUI] [Dbg] [Application.cc:453] Loading plugin [TransformControl]
[GUI] [Wrn] [Application.cc:845] [QT] file::/TransformControl/TransformControl.qml:104:3: QML Connections: Implicitly defined onFoo properties in Connections are deprecated. Use this syntax instead: function onFoo(<arguments>) { ... }
[GUI] [Wrn] [Application.cc:845] [QT] file::/TransformControl/TransformControl.qml:99:3: QML Connections: Implicitly defined onFoo properties in Connections are deprecated. Use this syntax instead: function onFoo(<arguments>) { ... }
[GUI] [Wrn] [Application.cc:845] [QT] file::/TransformControl/TransformControl.qml:94:3: QML Connections: Implicitly defined onFoo properties in Connections are deprecated. Use this syntax instead: function onFoo(<arguments>) { ... }
[GUI] [Wrn] [Application.cc:845] [QT] file::/TransformControl/TransformControl.qml:89:3: QML Connections: Implicitly defined onFoo properties in Connections are deprecated. Use this syntax instead: function onFoo(<arguments>) { ... }
[GUI] [Msg] Added plugin [Transform control] to main window
[GUI] [Msg] Loaded plugin [TransformControl] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libTransformControl.so]
[GUI] [Dbg] [Application.cc:453] Loading plugin [Screenshot]
[GUI] [Msg] Screenshot service on [/gui/screenshot]
[GUI] [Msg] Added plugin [Screenshot] to main window
[GUI] [Msg] Loaded plugin [Screenshot] from path [/usr/lib/x86_64-linux-gnu/gz-gui-7/plugins/libScreenshot.so]
[GUI] [Dbg] [Application.cc:453] Loading plugin [CopyPaste]
[GUI] [Msg] Added plugin [Copy/Paste] to main window
[GUI] [Msg] Loaded plugin [CopyPaste] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libCopyPaste.so]
[GUI] [Dbg] [Application.cc:453] Loading plugin [ComponentInspector]
[GUI] [Msg] Added plugin [Component inspector] to main window
[GUI] [Msg] Loaded plugin [ComponentInspector] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libComponentInspector.so]
[GUI] [Dbg] [Application.cc:453] Loading plugin [EntityTree]
[GUI] [Wrn] [Application.cc:845] [QT] file::/EntityTree/EntityTree.qml:148:7: QML ToolButton: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Msg] Added plugin [Entity tree] to main window
[GUI] [Msg] Loaded plugin [EntityTree] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libEntityTree.so]
[GUI] [Dbg] [Application.cc:323] Loading window config
[GUI] [Msg] Using server control service [/server_control]
[GUI] [Dbg] [Application.cc:610] Applying config
[GUI] [Wrn] [Component.hh:189] Trying to deserialize component with data type [N3sdf3v135WorldE], which doesn't have `operator>>`. Component will not be deserialized.
[GUI] [Wrn] [Model.hh:98] Unable to deserialize sdf::Model
[GUI] [Wrn] [Model.hh:98] Unable to deserialize sdf::Model
[GUI] [Wrn] [Model.hh:98] Unable to deserialize sdf::Model
[GUI] [Wrn] [Model.hh:98] Unable to deserialize sdf::Model
[GUI] [Wrn] [Model.hh:98] Unable to deserialize sdf::Model
[GUI] [Wrn] [Application.cc:845] [QT] file::/EntityTree/EntityTree.qml:148:7: QML ToolButton: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:845] [QT] file::/WorldStats/WorldStats.qml:53:3: QML RowLayout: Binding loop detected for property "x"
[GUI] [Wrn] [Application.cc:845] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:52:3: QML RenderWindowOverlay: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:845] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:67:3: QML EntityContextMenu: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Dbg] [MinimalScene.cc:657] Creating gz-rendering interface for OpenGL
[GUI] [Dbg] [MinimalScene.cc:813] Creating render thread interface for OpenGL
[GUI] [Wrn] [Application.cc:845] [QT] file::/Gazebo/GazeboDrawer.qml:147:3: QML Dialog: Binding loop detected for property "implicitHeight"
[GUI] [Msg] Loading plugin [gz-rendering-ogre2]
[GUI] [Err] [Ogre2RenderEngine.cc:1113] Unable to create the rendering window: OGRE EXCEPTION(3:RenderingAPIException): OpenGL 3.3 is not supported. Please update your graphics card drivers. in GL3PlusRenderSystem::initialiseContext at ./RenderSystems/GL3Plus/src/OgreGL3PlusRenderSystem.cpp (line 3434)
[GUI] [Err] [Ogre2RenderEngine.cc:1113] Unable to create the rendering window: OGRE EXCEPTION(3:RenderingAPIException): OpenGL 3.3 is not supported. Please update your graphics card drivers. in GL3PlusRenderSystem::initialiseContext at ./RenderSystems/GL3Plus/src/OgreGL3PlusRenderSystem.cpp (line 3434)
[GUI] [Err] [Ogre2RenderEngine.cc:1113] Unable to create the rendering window: OGRE EXCEPTION(3:RenderingAPIException): OpenGL 3.3 is not supported. Please update your graphics card drivers. in GL3PlusRenderSystem::initialiseContext at ./RenderSystems/GL3Plus/src/OgreGL3PlusRenderSystem.cpp (line 3434)
[GUI] [Err] [Ogre2RenderEngine.cc:1113] Unable to create the rendering window: OGRE EXCEPTION(3:RenderingAPIException): OpenGL 3.3 is not supported. Please update your graphics card drivers. in GL3PlusRenderSystem::initialiseContext at ./RenderSystems/GL3Plus/src/OgreGL3PlusRenderSystem.cpp (line 3434)
[GUI] [Err] [Ogre2RenderEngine.cc:1113] Unable to create the rendering window: OGRE EXCEPTION(3:RenderingAPIException): OpenGL 3.3 is not supported. Please update your graphics card drivers. in GL3PlusRenderSystem::initialiseContext at ./RenderSystems/GL3Plus/src/OgreGL3PlusRenderSystem.cpp (line 3434)
[GUI] [Err] [Ogre2RenderEngine.cc:1113] Unable to create the rendering window: OGRE EXCEPTION(3:RenderingAPIException): OpenGL 3.3 is not supported. Please update your graphics card drivers. in GL3PlusRenderSystem::initialiseContext at ./RenderSystems/GL3Plus/src/OgreGL3PlusRenderSystem.cpp (line 3434)
[GUI] [Err] [Ogre2RenderEngine.cc:1113] Unable to create the rendering window: OGRE EXCEPTION(3:RenderingAPIException): OpenGL 3.3 is not supported. Please update your graphics card drivers. in GL3PlusRenderSystem::initialiseContext at ./RenderSystems/GL3Plus/src/OgreGL3PlusRenderSystem.cpp (line 3434)
[GUI] [Err] [Ogre2RenderEngine.cc:1113] Unable to create the rendering window: OGRE EXCEPTION(3:RenderingAPIException): OpenGL 3.3 is not supported. Please update your graphics card drivers. in GL3PlusRenderSystem::initialiseContext at ./RenderSystems/GL3Plus/src/OgreGL3PlusRenderSystem.cpp (line 3434)
[GUI] [Err] [Ogre2RenderEngine.cc:1113] Unable to create the rendering window: OGRE EXCEPTION(3:RenderingAPIException): OpenGL 3.3 is not supported. Please update your graphics card drivers. in GL3PlusRenderSystem::initialiseContext at ./RenderSystems/GL3Plus/src/OgreGL3PlusRenderSystem.cpp (line 3434)
[GUI] [Err] [Ogre2RenderEngine.cc:1113] Unable to create the rendering window: OGRE EXCEPTION(3:RenderingAPIException): OpenGL 3.3 is not supported. Please update your graphics card drivers. in GL3PlusRenderSystem::initialiseContext at ./RenderSystems/GL3Plus/src/OgreGL3PlusRenderSystem.cpp (line 3434)
[GUI] [Err] [Ogre2RenderEngine.cc:1121] Unable to create the rendering window after [11] attempts.
[GUI] [Err] [Ogre2RenderEngine.cc:1032] Failed to create dummy render window.
Stack trace (most recent call last):
Segmentation fault (Address not mapped to object [0x220])
[Dbg] [SignalHandler.cc:141] Received signal[2].
[Dbg] [ServerPrivate.cc:115] Server received signal[2]
[Dbg] [gz.cc:411] Shutting down gz-sim-server
[Dbg] [SimulationRunner.cc:540] Exiting postupdate worker thread (0)
笔记本硬件环境遇到问题:不支持OpenGL3.3
$ sudo apt-get install mesa-utils
[sudo] password for daniel:
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
The following packages were automatically installed and are no longer required:
tightvncpasswd usb-modeswitch usb-modeswitch-data
Use 'sudo apt autoremove' to remove them.
The following additional packages will be installed:
mesa-utils-bin
The following NEW packages will be installed:
mesa-utils mesa-utils-bin
0 upgraded, 2 newly installed, 0 to remove and 0 not upgraded.
Need to get 1,118 kB of archives.
After this operation, 2,455 kB of additional disk space will be used.
Do you want to continue? [Y/n] Y
Get:1 http://cn.archive.ubuntu.com/ubuntu jammy/universe amd64 mesa-utils-bin amd64 8.4.0-1ubuntu1 [53.8 kB]
Get:2 http://cn.archive.ubuntu.com/ubuntu jammy/universe amd64 mesa-utils amd64 8.4.0-1ubuntu1 [1,065 kB]
Fetched 1,118 kB in 5s (242 kB/s)
Selecting previously unselected package mesa-utils-bin:amd64.
(Reading database ... 310676 files and directories currently installed.)
Preparing to unpack .../mesa-utils-bin_8.4.0-1ubuntu1_amd64.deb ...
Unpacking mesa-utils-bin:amd64 (8.4.0-1ubuntu1) ...
Selecting previously unselected package mesa-utils.
Preparing to unpack .../mesa-utils_8.4.0-1ubuntu1_amd64.deb ...
Unpacking mesa-utils (8.4.0-1ubuntu1) ...
Setting up mesa-utils-bin:amd64 (8.4.0-1ubuntu1) ...
Setting up mesa-utils (8.4.0-1ubuntu1) ...
Processing triggers for man-db (2.10.2-1) ...
$ glxinfo | grep "OpenGL version"
OpenGL version string: 3.0 Mesa 22.2.5
更换Gazebo启动命令,性能可能会不太好!
$ gz sim -v4 -r shapes.sdf --render-engine ogre
3. ArduPilot SITL + Gazebo模拟
笔记本环境
daniel@daniel-ThinkPad-SL410:~$ uname -r
5.19.0-35-generic
daniel@daniel-ThinkPad-SL410:~$ lsb_release -a
No LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 22.04.2 LTS
Release: 22.04
Codename: jammy
ArduPilot版本
$ git log -n 1
commit c33653cd4ebec780d6961c0bcbd42a38c787fb28 (HEAD -> Copter-4.3, origin/Copter-4.3)
Author: bugobliterator <siddharthbharatpurohit@gmail.com>
Date: Sat Mar 18 09:04:26 2023 +1100
bootloaders: add CubeOrangePlus-bdshot bootloader
Gazebo版本
$ gz sim --version
Gazebo Sim, version 7.4.0
Copyright (C) 2018 Open Source Robotics Foundation.
Released under the Apache 2.0 License.
ArduPilot Gazebo plugin版本
$ git log -n 1
commit 0753b067a5a20219930818de34395577b930c129 (HEAD -> main, origin/main, origin/HEAD)
Author: Rhys Mainwaring <rhys.mainwaring@me.com>
Date: Mon Mar 20 15:51:29 2023 +0000
Update README (
Update example models section with links to recent additions to SITL_Models/Gazebo.
Signed-off-by: Rhys Mainwaring <rhys.mainwaring@me.com>
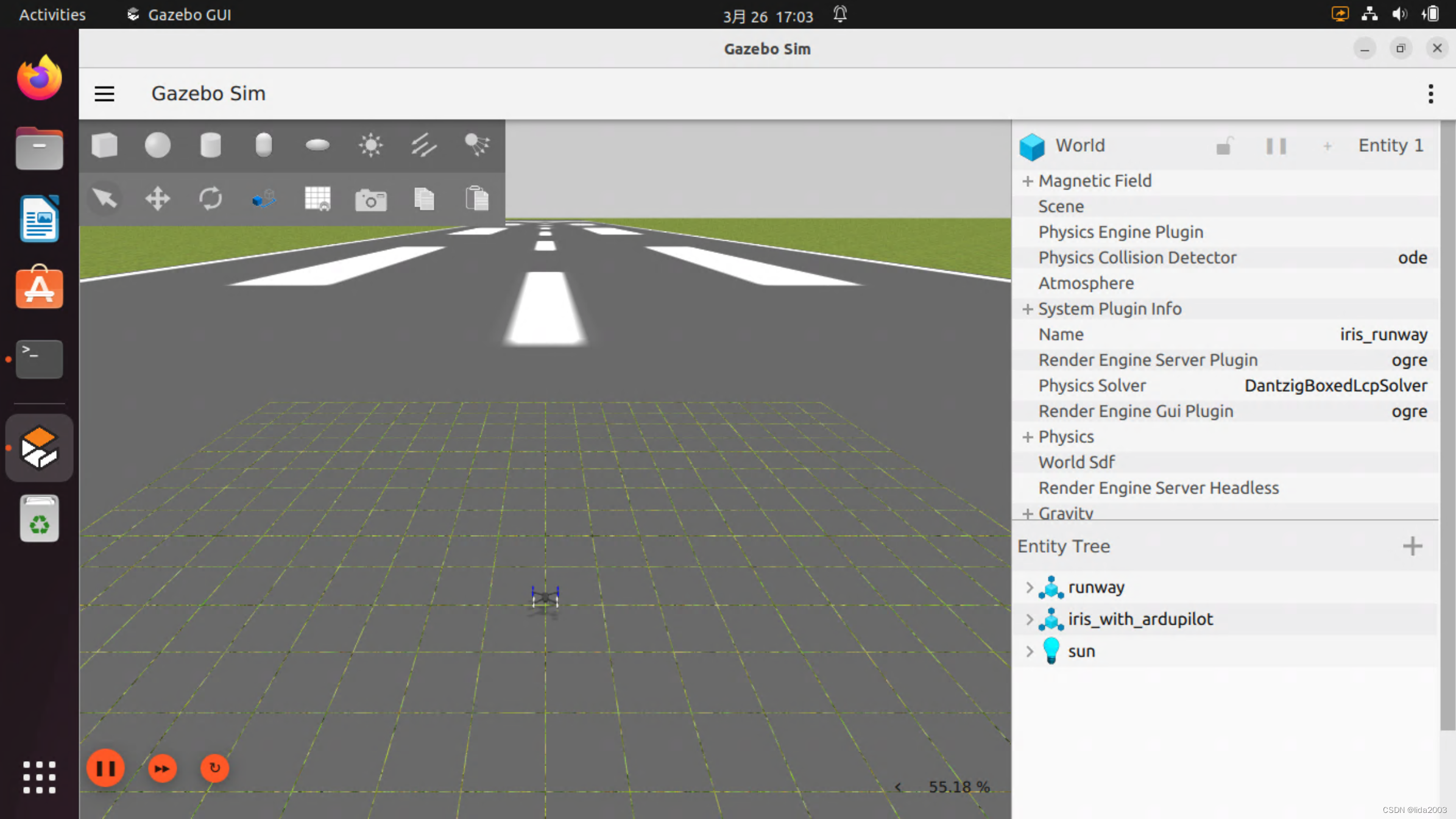
3.1 Gazebo Garden模拟环境
$ gz sim -v4 -r iris_runway.sdf --render-engine ogre
3.2 ArduPilot SITL仿真环境
$ sim_vehicle.py -v ArduCopter -f gazebo-iris --model JSON --map --console
注:SITL安装,详见:ArduPilot飞控之ubuntu22.04-SITL安装
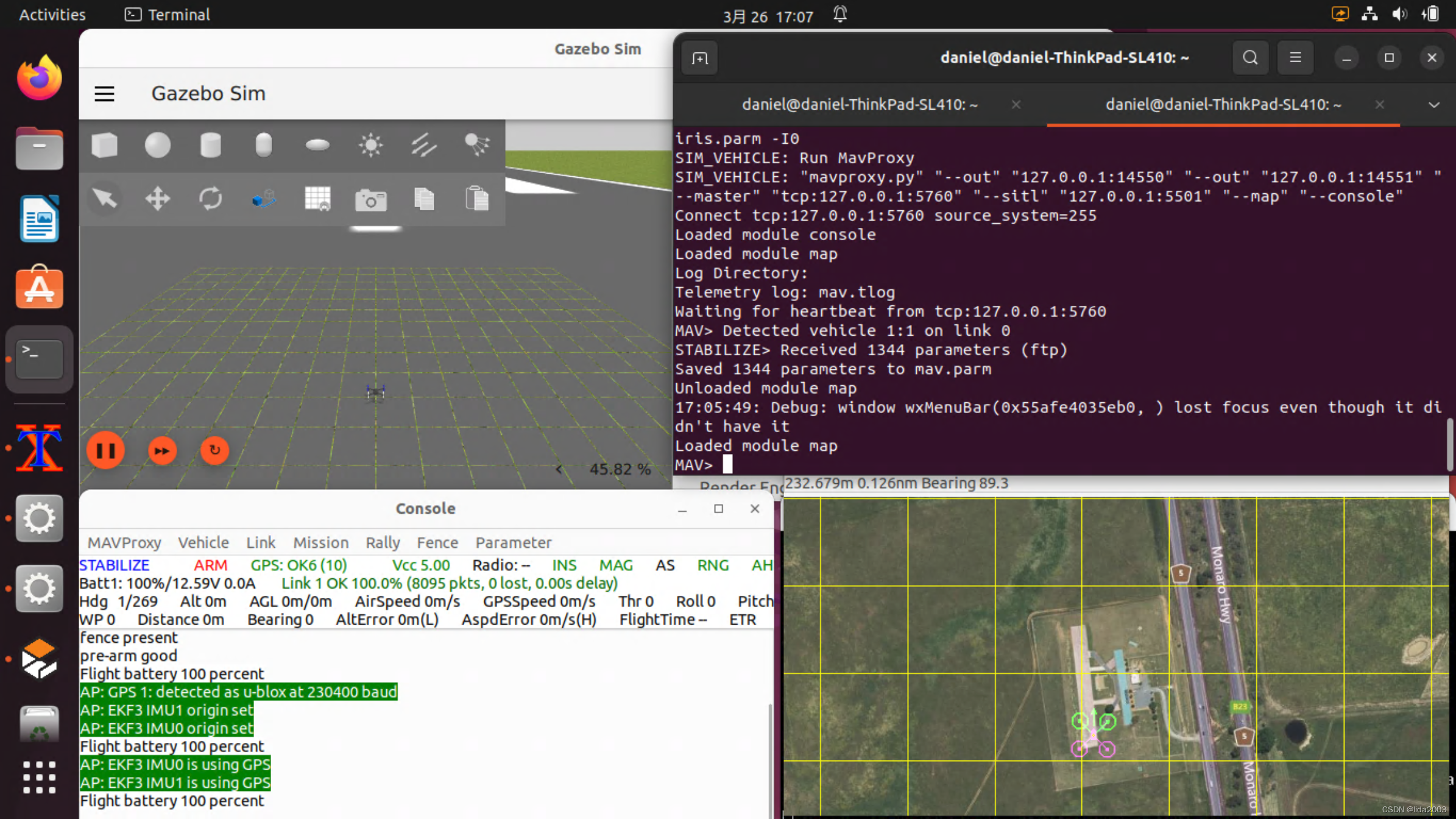
3.3 ArduPilot SITL + Gazebo 测试视频
ArduPilot SITL + Gazebo Demo Try
MAVProxy输入命令如下:
mode guided
arm throttle
takeoff 5
position 0 0 3
position 100 100 0
position 100 -200 0
rtl
4. 参考资料
【1】Using SITL with Gazebo
【2】Gazebo Garden/7th major release of Gazebo
【3】ArduPilot Gazebo Plugin
【4】ArduPilot飞控之ubuntu22.04-SITL安装
【5】MAVProxy
5. 补充资料
5.1 官网视频
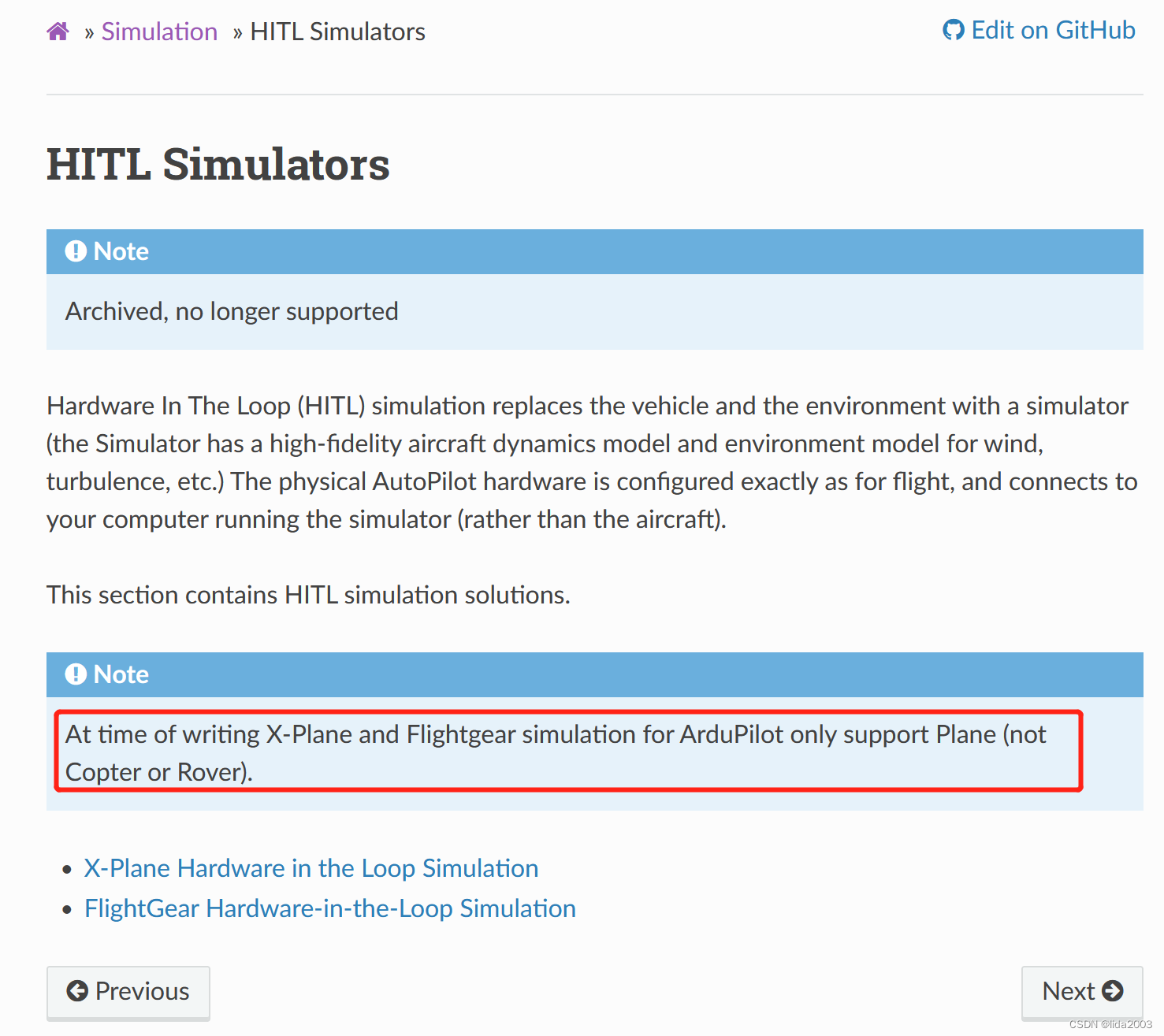
5.2 关于HITL
当前ArdupilotCopter尚没有HITL模拟的方法,后面将跳过Copter HITL部分。
有兴趣的朋友可以适时去跟进了解下hitl-simulators。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)