我们用
P
I
PI
PI控制器来引入这个零点,
P
I
PI
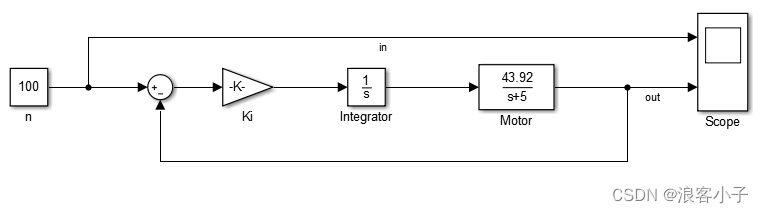
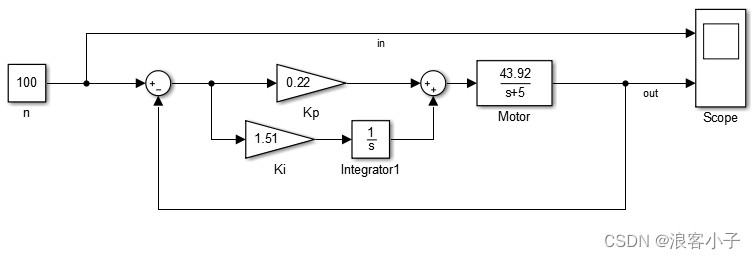
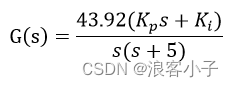
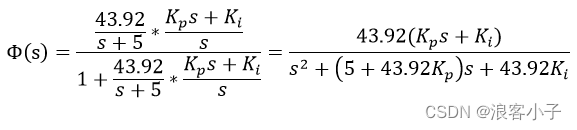
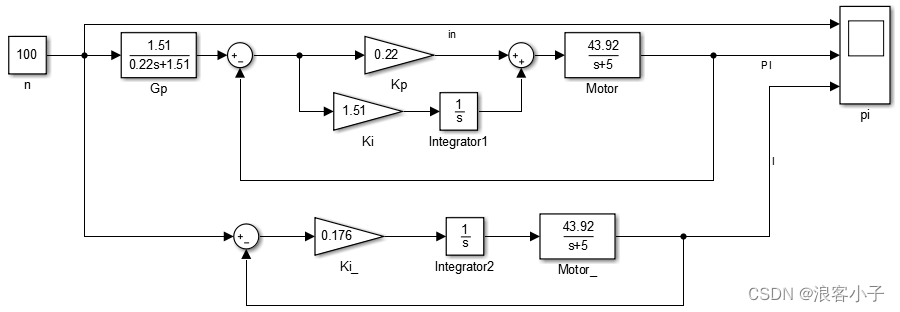
PI控制器的传递函数为 系统框图如下 开环传递函数为 闭环传递函数
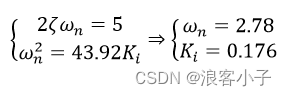
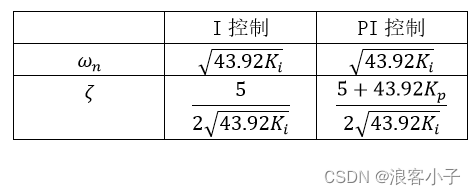
从这个闭环传递函数中可以看出,开环零点与开环极点共同决定闭环极点,闭环零点由开环零点决定(不看开环增益)。与上述积分控制情况下相比 从表中可以看出,当两种控制器积分系数
K
K
Ki相同时,系统的无阻尼自然频率
ω
ω
ωn也相同,但相比
I
I
I控制的系统,
P
I
PI
PI控制系统的阻尼比
ζ
ζ
ζ要更大,那么超调量更小,调节时间更短。那么也就是说,在
I
I
I控制与
P
I
PI
PI控制下系统的阻尼比
ζ
ζ
ζ相同时,
P
I
PI
PI控制的积分系数
K
K
Ki要更大,无阻尼自然频率
ω
ω
ωn也更大,故两个系统响应的超调量相同,但
P
I
PI
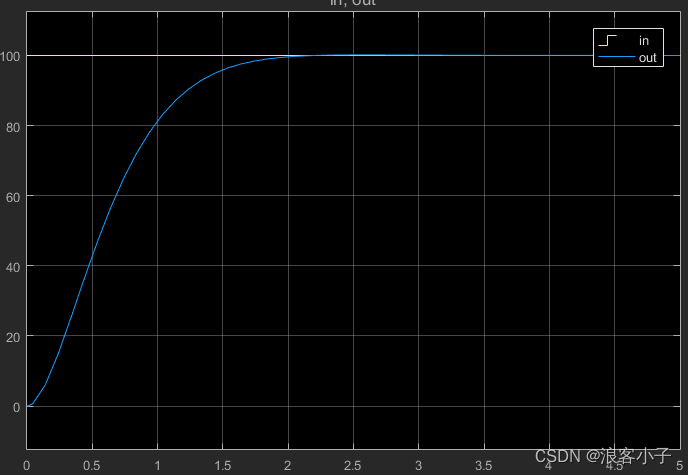
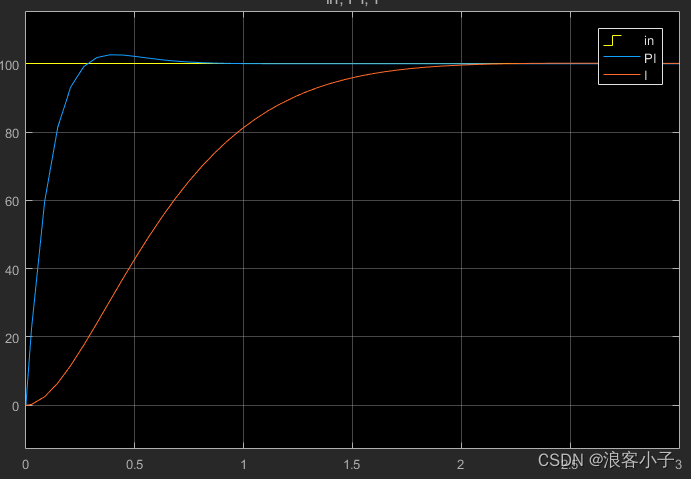
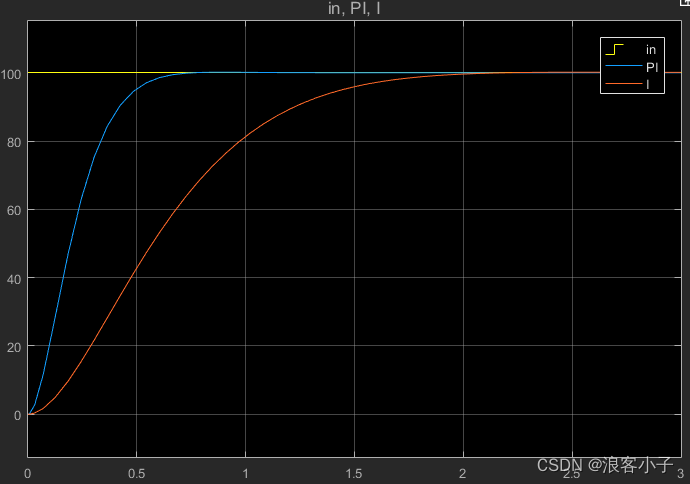
PI控制的系统调节时间会更短。 取 此时对比相同阻尼比
ζ
ζ
ζ情况下,两种控制器的控制效果 可以看出,
I
I
I控制即未引入开环零点时,系统响应调节时间长,超调可以忽略不计,但
P
I
PI
PI控制即引入开环零点时,系统响应虽然调节时间很短,但却有一个较为明显的超调,这是由于引入开环零点时,同时引入了闭环零点。
闭环零点对系统响应的影响
上述中可以发现,尽管阻尼比
ζ
ζ
ζ相同,
P
I
PI
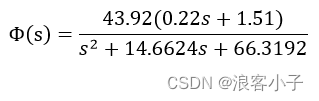
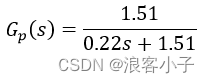
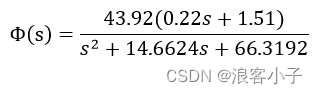
PI控制却有了一个明显的超调,这是闭环零点造成的,我们可以引入一个闭环极点来消掉这个闭环零点,也就是引入一个前置滤波器。在
K
K
Kp
=
0.22
=0.22
=0.22,
K
K
Ki
=
1.51
=1.51
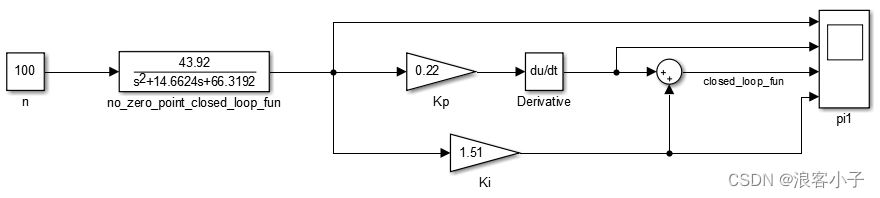
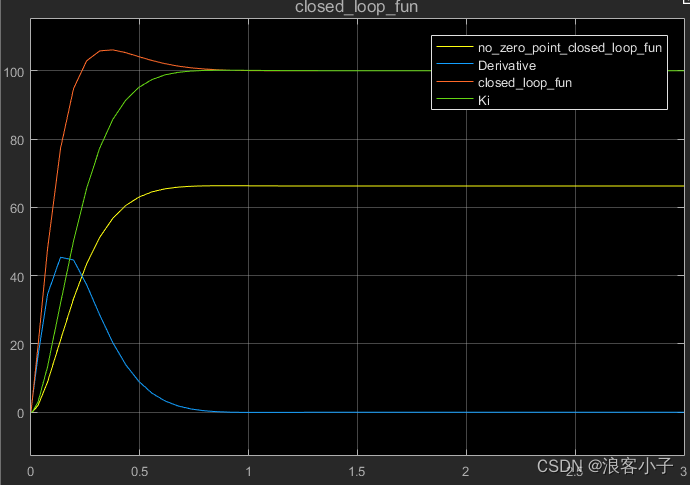
=1.51时的闭环传递函数 那么要消掉这个闭环零点,前置滤波器可以确定为 系统框图如下 此时系统响应为 可以看出,引入前置滤波器后,调节时间没有明显的变化,但消除了那个明显的超调(其实并没有完全消除超调量,此时的超调量很小可以忽略不计)。所以,闭环零点会增加系统响应的超调量,原因如下 将闭环传递函数 改成如下结构 它的响应与原闭环传递函数响应相同,来看看各位置响应 蓝色曲线表示经过微分后的输出,绿色曲线表示经
K
K
Ki后的输出,两条曲线相加就是橙色曲线,即原闭环传递函数的响应曲线,从这个图可以看出,引入闭环零点后,会增加超调,同时也会减小系统响应的峰值时间。