上面讲完了最简单的一阶系统动态性能指标,下面说说二阶的
1.二阶系统的标准形式
二阶系统的典型结构:
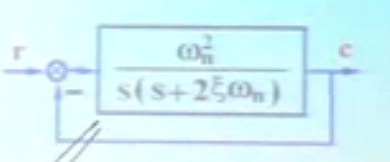
由这个图,我们可以轻松算出他的开环传递函数,增益,闭环传递函数和增益
这里不手打了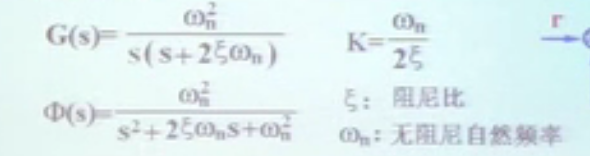
在写二阶传递函数时,我们一般把它写成首一形(传递函数依然是化成尾一情况去看)
闭环虽然可以用Mason去算,但没必要,计算时直接写=开环分子/(开环分子+开环分母)
2.二阶传递函数的分类:
1.ξ = 0 零阻尼 极点是虚轴上那个关于实轴对称的两个点
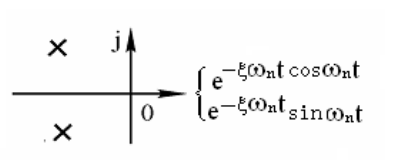
2.0 < ξ < 1 欠阻尼 极点是虚轴左边关于实轴对称的两个点
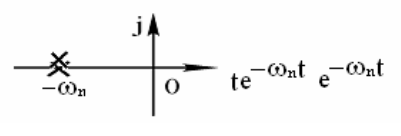
3.ξ = 1 临界阻尼 实轴负半轴上一点
4.ξ > 1 过阻尼 实轴负半轴上互异的两点
下面具体看图
1.
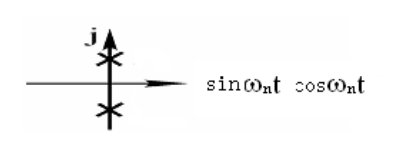
单位阶跃响应曲线:在稳态值上下波动,到不了稳态,就像sin
单位阶跃曲线是一个有超调量的曲线
3.
单位阶跃响应曲线:夹在24之间的一曲线

一个相对平滑的曲线,
3.对临界阻尼和过阻尼动态性能指标的计算
其实这里的要求不高,要求会算调节时间就行,因为他们是单调上升曲线,没有超调量需要计算
思路:
根据结构图之类计算单位阶跃响应,然后Laplace变换
 以上这一坨讲的就是
以上这一坨讲的就是
令分母为零,得到的两个根 分别让他们等于(-1/T1),(-1/T2),就得到了T和 ξ,ω
两个二阶传递函数参数之间的关系
然后算出单位阶跃响应,Laplace变换成为h(t),最后发现 ξ和 ts/T1有对应的关系,
即ξ确定,ts/T1也确定了
得到这个结论,我们绘制出了一个ξ在ts/T1和T1/T2的表格,并得到了针对二阶过阻尼的ts解法

对于给定的二阶传递函数,我们对分母,计算出T1,T2,ξ
如果ξ >= 1,我们知道了是过阻尼,则计算T1/T2,对应给的表格,可以看到ts/T1的值
然后我们就得到ts了。
超调量 = 0%
这里再说一个主极点的概念
我们可以发现,过阻尼其实就是两个惯性环节的积,然后我们会发现,给靠近虚轴的那个极点一个阶跃信号,他的输出和组合的时候输出差不多,而给远离的那个极点阶跃会发现输出和阶跃差不多,所以一般认为:
靠近虚轴的极点就是主极点,当一个靠近虚轴很近,另外一个很远,这是我们可以忽略
远的极点
4.对零阻尼和欠阻尼动态性能指标的计算
首先,我们要知道,二阶的通式都是上面说的
wn^2/s(s+2*ξ*wn)
知道这个以后,我们上面说过,欠阻尼的时候,极点是在虚轴右边并关于实轴对称的两点,所以有必要了解一下这两个极点的表示方法:
1.实部+虚部
通过令传递函数分母为0,解出两个虚根
:-wn*ξ +/- √(1-ξ^2) *wn 即是实部加虚部了
2.自定义的极坐标:
从虚轴负半轴开始,顺时针转到原点指向上极点方向的角度 beta
cos beta = ξ sin beta = √(1-ξ^2)
ξ大,beta小
下面开始推导出单位阶跃响应曲线的相关:
1.通过闭环传递函数计算出 单位阶跃响应(×(1/S))
2.拆分并用Laplace 化成 h(t)
3.化简 h(t) 用到上面说的角beta
得到: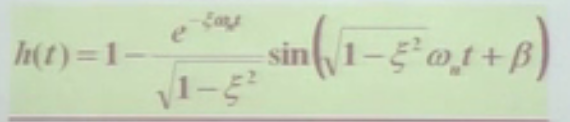 通过这个我们可以去计算动态性能指标了(就是那条曲线的函数表达式)
通过这个我们可以去计算动态性能指标了(就是那条曲线的函数表达式)
a. ξ = 0,即零阻尼情况
cos beta = 0,beta = 90度,上式化简为:
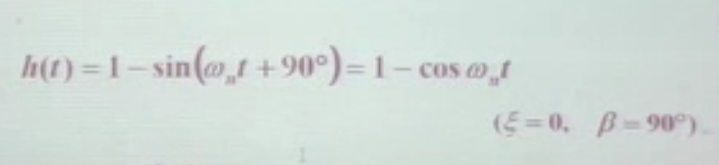
曲线类似sin/cos的曲线,超调量100%,调节时间 ∞
b. 0 < ξ < 1,即欠阻尼情况
欠阻尼系统曲线如下

由上面导出的式子以及sin的范围可以看出,函数必然处在1+/- X的两条包络线之间,稳态值趋于1。
超调量:
步骤 1.找到峰值点(求导/通过laplace得到单位脉冲响应再反变换)
2.代入式子中求得峰值M
3.超调量= (M-1)/1
1.
阻尼比越大,曲线趋于1的速度越快(阻尼比就好像你父母逼你学习的力度,逼的越紧,你能越快走上正轨),所以阻尼比越大,超调量越小

由此可以计算出tp
tp为峰值时间 = pai/虚部 虚部为 √(1-ξ^2) | *wn
求出h(tp)
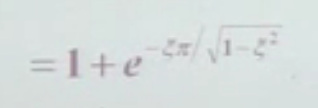
由此可以得到超调量:
***(只和阻尼比有关,所以到极点的一条线上所有点超调量相同)
 记忆:
记忆:e^(pai * 实部/虚部)
调节时间:
以包络线进入误差带的时间作为调节时间
计算方法:即包络线和稳态值的差为0.05
计算公式: 3.5/(-)负的实部
说明s平面上,在一条竖直线上的所有点的调节时间相同
总结
 ps用的时候保证是欠阻尼的情况
ps用的时候保证是欠阻尼的情况
传递函数解题步骤
1.写出闭环传递函数
2. a.一阶函数,超调量 = 0,调节时间 = 3T ,T是分母一次方项的系数(TS),结束!
b.二阶函数,写出wn(分子开根) ,计算出阻尼比(分母一次方项/2wn) 判断出类型
3. a.过阻尼和临界阻尼情况:1.超调量 = 0,
2.调节时间:解分母方程,得到(-1/T1和-1/T2)
算出T1/T2,查表得到ts/T1,计算出ts
b.欠阻尼:解出极点的坐标,1.超调量:pai/虚部
2.峰值时间:e^(pai*实部/虚部)
3.调节时间:3.5/负实部
补充一些概念和技巧:
1.最佳阻尼比:ξ = 0.707,虽然按照包络线求调节时间的模式,一条竖线上所有点调节
时间相同,实际上按照最初的定义 ξ = 0.707的时候调节时间最短
2.在给性能指标求参数的时候会给出稳态值,这个时候用终值定理会很有用