1 代码包地址

2 硬件准备
2.1 SCOUT MINI 小白车 + 尾部航空插头 + CAN_TO_USB适配器


2.2 接线
如上图,带有四根颜色线的为航空插头线:
红线—VCC 电池正极
黑线—GDN 电池负极
黄线—CAN_H
蓝线—CAN_L
CAN_TO_USB适配器一端接小车CAN口(即黄蓝线),
另一端USB口接入电脑即可
3 具体操作
在主目录下新建 catkin_sl文件夹,在文件夹下新建src,将下载的包放在此文件夹下
3.1 ROS安装和环境设置
此步自行按照如下官网链接进行
3.2 配置 CAN-TO-USB 适配器
**注意:**每次拔查硬件后重新通过电脑控制小车前,都需要重新运行步骤 3.2.1 和 3.2.2 以启用内核模块。
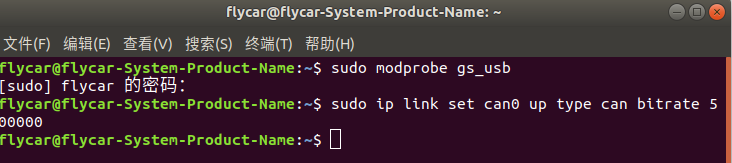
3.2.1 设置CAN转USB适配器
启用gs_usb 内核模块(本指令在进行2中硬件准备工作后才可以使用)
sudo modprobe gs_usb
3.2.2 设置can设备参数
sudo ip link set can0 up type can bitrate 500000
3.2.3 查看can设备
如果在前面的步骤中没有发生错误,使用以下指令查看can设备
ifconfig -a

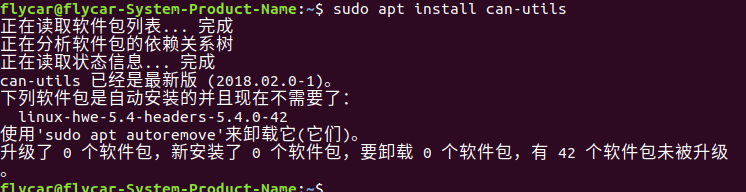
3.2.4 安装和使用can-utils来测试硬件
sudo apt install can-utils
3.2.5 测试指令
candump can0 //receiving data from can0
cansend can0 001#1122334455667788 //send data to can0
接收成功如下,不成功报错请返回执行 3.2.1 和 3.2.2

3.3 ROS Package 的使用
3.3.1 安装 ROS packages 依赖
sudo apt install ros-melodic-teleop-twist-keyboard
如果是 Kinetic版本,把上述指令中的“melodic” 改成 “kinetic” 即可
3.3.2 编译
将scout_ros package 下载至的您的catkin 工作空间,并进行编译(我的catkin编译工作空间在: ~/catkin_sl/src 目录下)
cd ~/catkin_sl/src
git clone https://github.com/westonrobot/scout_ros.git
cd ..
catkin_make
(!请保证网络通畅极好!
此处我已下载过,所以显示已经存在,正常下载会显示正在克隆…接收5%…直至完成)

3.3.3 配置 Webots simulation 环境
- 下载安装 webots-R2021b-x86-64_ubuntu-18.04.tar.bz2 (download from https://cyberbotics.com/ )
- 安装 Webots ROS package
sudo apt install ros-melodic-webots-ros

3. 设置 WEBOTS_HOME 变量,把下面这行代码加入到 "~/.bashrc"中
export WEBOTS_HOME=/home/flycar/catkin_sl/src/webots

4. 确保将所有所需文件夹放置在此路径下 /home/flycar/catkin_ls/src ,在catkin_ls下打开终端编译ROS工作空间下的所有功能包
cd ~/catkin_ls
catkin_make

3.4 启动 ROS nodes
3.4.1 开始 the base node
roslaunch scout_bringup scout_minimal.launch
问题
出现如下问题一般是网络问题或查看IP是否一致:在/.bashrc
下改为一致保存

 然后运行如下两个命令
然后运行如下两个命令
source /.bashrc
roscore
 再重新运行 roslaunch scout_bringup scout_minimal.launch即可
再重新运行 roslaunch scout_bringup scout_minimal.launch即可

3.4.2 开启键盘控制
Start the keyboard tele - op node
roslaunch scout_bringup scout_teleop_keyboard.launch

4 结果
| 键盘控制 |
小车运动情况 |
| I |
前进 |
| K/其它任意键 |
停止 |
| < |
后退 |
| U |
左转 |
| O |
右转 |
| J |
左自转 |
| L |
右自转 |
简要列举几个控制,具体自行实验
注意!一定要先清楚停止键是哪个或者先把遥控手柄打开再进行键盘控制!!不然它就乱撞去了!根本停不下来哈哈哈哈!!

