我理解错了,相机内参矩阵和相机畸变参数是两个东西,而且好像实际pnp好像没有用到相机的外参矩阵。
内参我觉得主要就是指畸变参数。畸变又分为径向和切向畸变。畸变应该是比较好理解的对吧。
https://blog.csdn.net/sunboyiris/article/details/78082699
https://blog.csdn.net/sinat_16643223/article/details/110442795
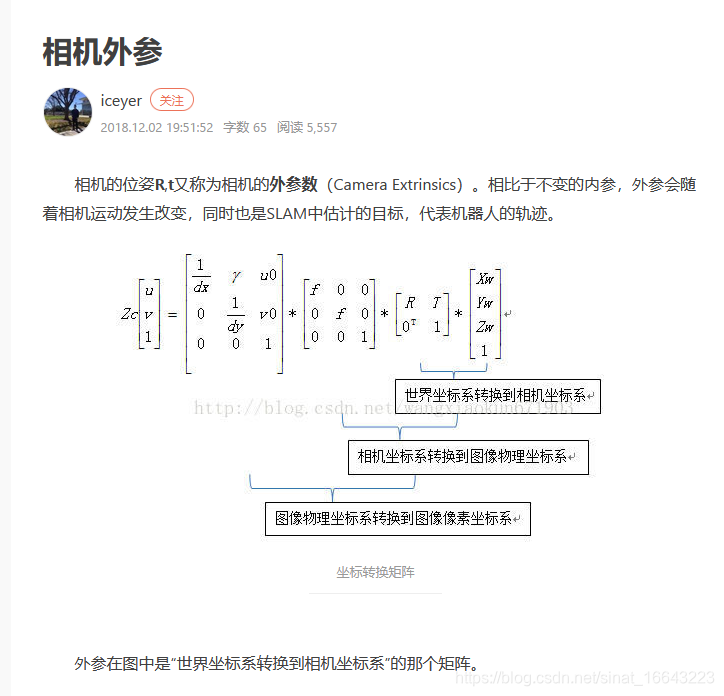
外参呢,就是平移矩阵和旋转矩阵,两个坐标系之间的关系就可以用平移矩阵加旋转矩阵描述嘛,和tf一样,这个我之前总结过对吧。
https://blog.csdn.net/sinat_16643223/article/details/114649640

https://blog.csdn.net/sunboyiris/article/details/78082699
那我们标定的时候,标定板
相机外参难道是这个意思?
https://www.guyuehome.com/7689
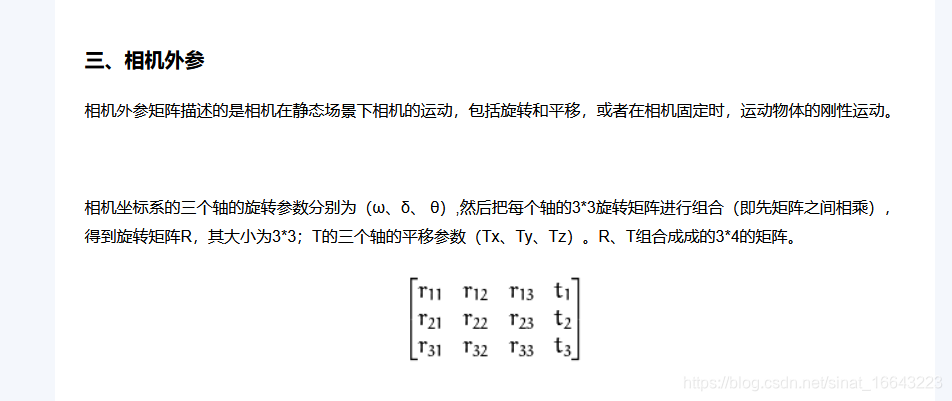
相机外参似乎就是相机的位姿啊,相机外参是相机外部参数啊,相机外参不就是我们要求的相机位置么!!!!!!!!!!!!!!!!
http://www.baidu.com/link?url=fGc_0a9F1XZ5tveYx6jE7baW8SkihhDpf6bFDeYFzbT7Fi7PAKBsLhVMl5WbTqd6&wd=&eqid=ee0bcdbe0000796400000006605d9e30

https://www.jianshu.com/p/2db2b167fb90
是不是已知内参其他几个参数可以求外参就是pnp?
标定是已知几个求相机内参?
我们这么想想,标定是不是已经知道特征点现实世界的三维坐标了,因为知道那些方格子的边长了嘛,而且知道像素点坐标。
http://blog.sina.com.cn/s/blog_15ff1a2ca0102xjd9.html
https://baijiahao.baidu.com/s?id=1603212014194819932&wfr=spider&for=pc

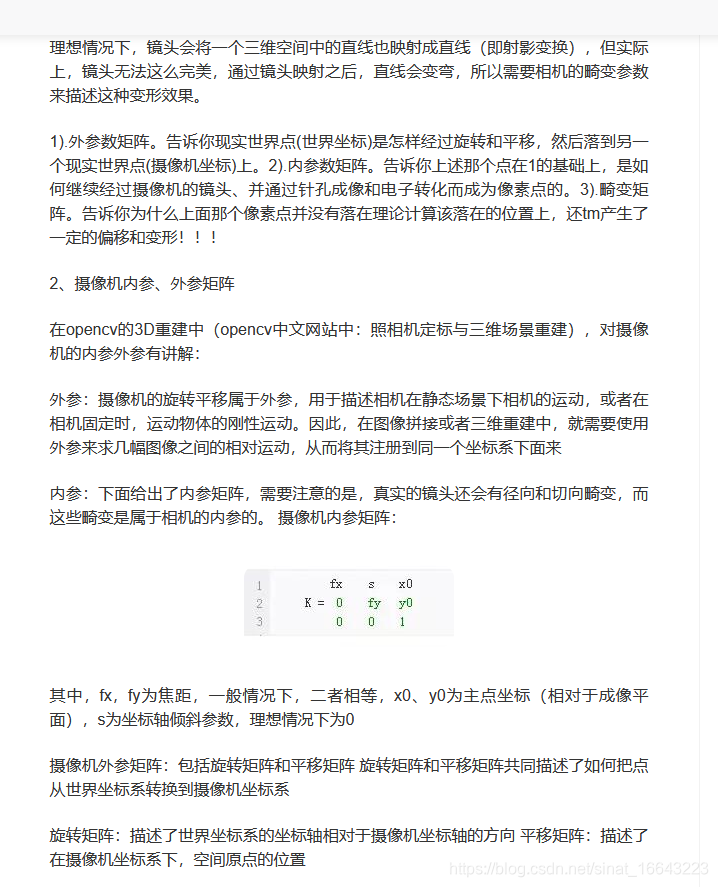
这里说了相机内参包括内参矩阵和畸变参数矩阵!!!!!这样就好理解说得通了。
也好理解ROS下标定就得到内参矩阵和畸变参数就可以了。做pnp也是用内参矩阵和标定参数就可以了。并没有外参。
https://blog.csdn.net/weixin_42872123/article/details/110468692?utm_term=%E7%9B%B8%E6%9C%BA%E7%9A%84%E5%A4%96%E5%8F%82%E6%9C%89%E4%BB%80%E4%B9%88&utm_medium=distribute.pc_aggpage_search_result.none-task-blog-2~all~sobaiduweb~default-2-110468692&spm=3001.4430
只要获得 特征点的世界坐标(三维坐标)、2D坐标(像素坐标)、相机内参矩阵、相机畸变参数矩阵 以上四个参数即可以解得相机与标志物之间的外参(R旋转矩阵、T位置矩阵)
再回看这句话是不是有感觉了,这里都明确说了,是得到相机的外参!!!!!!!!
这个opencv里的标定程序明确说了就是计算相机内参矩阵和畸变系数。

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)