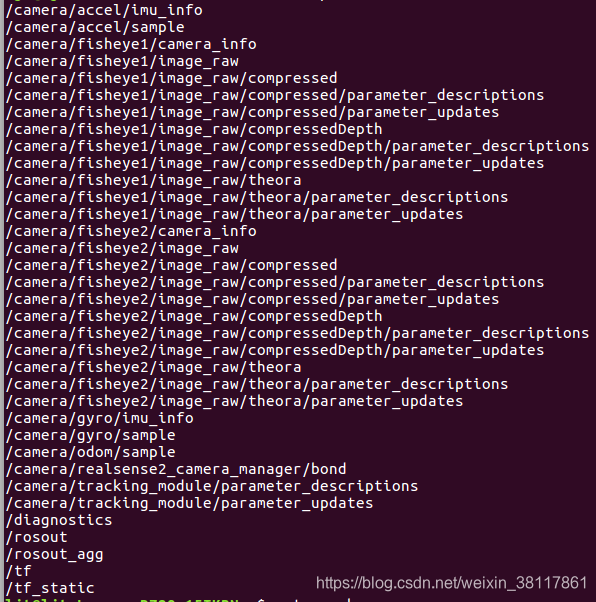
roslaunch realsense2_camera rs_t265.launch rosrun rviz rviz roslaunch vins_estimator euroc.launch
roslaunch realsense2_camera rs_t265.launch
rosrun rviz rviz
roslaunch vins_estimator euroc.launch
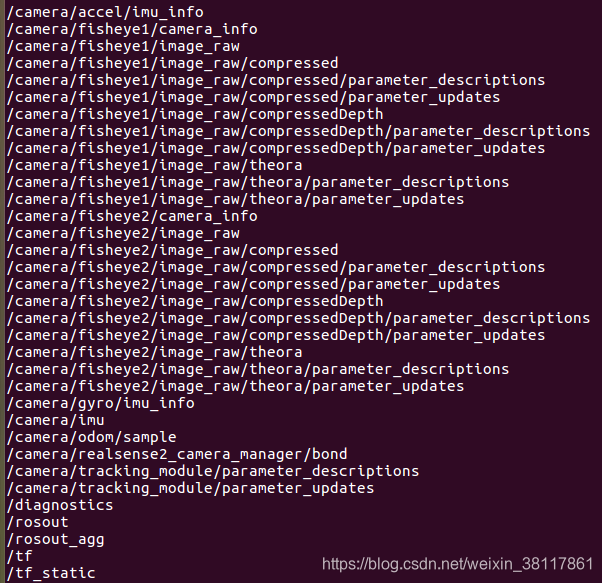
(将加计和陀螺仪主题放在一起)修改rs_camera.launch:
rs_camera.launch