问题背景:
项目需要提供一份系统使用的计算机硬盘备份和恢复方案,方便计算机软硬件故障后快速的恢复系统。之前项目使用的工具是Macrium reflect工具,但这个工具现在收费了,而且功能比较多,很多也用不到。所以需要找个替代方案。
解决方案:
通过网络搜索发现一块开源免费软件Redo Rescue比较好用,自己尝试使用了下,这里记录下来,以免忘记。
需要材料:
1、U盘一个,2GB大小即可,用于制作引导盘。
2、移动硬盘一个,建议2TB,根据自己需要备份计算机硬盘的决定。用于存放备份文件。
操作步骤:
在备份和恢复硬盘时,我们并不用启动硬盘所在的操作系统,而是直接通过引导盘使用里面的备份恢复软件Redo Rescue。这样在操作系统故障无法登录时也不会影响我们的操作。
(1)在备份硬盘前,我们首先需要制作一个启动引导盘:
1、 首先到https://www.balena.io/etcher#download-etcher网站下载免费软件Etcher,它是一个制作引导盘的工具。我们下载基于windows系统的可执行包。
2、 然后到http://redorescue.com/网站下载免费软件Redo Rescue,它是一个ISO文件。
3、 双击直接打开步骤1下载的Etcher软件如下图,然后按提示的步骤操作即可。

从文件烧录:即Redo Rescue软件包,ISO文件
选择目标磁盘:前面准备的制作引导盘的U盘(需提前插入USB口)
现在烧录:Etcher软件烧录Redo Rescue软件包到U盘
烧录完成后,U盘引导盘即制作完成。
(2)备份磁盘映像
1、首先把上面制作的引导U盘和存储备份文件的硬盘插入到目标计算机的USB口上。
2、启动计算机进入BIOS设置界面(一般是按F8或F12或Delete键进入),在Boot设置里
修改 计算机引导顺序。把USB引导调整到最上面,即让计算机启动时首先进入U盘的
引导程序。
3、引导程序设置完成保存后,计算机会从U盘加载引导程序,启动后界面如下: 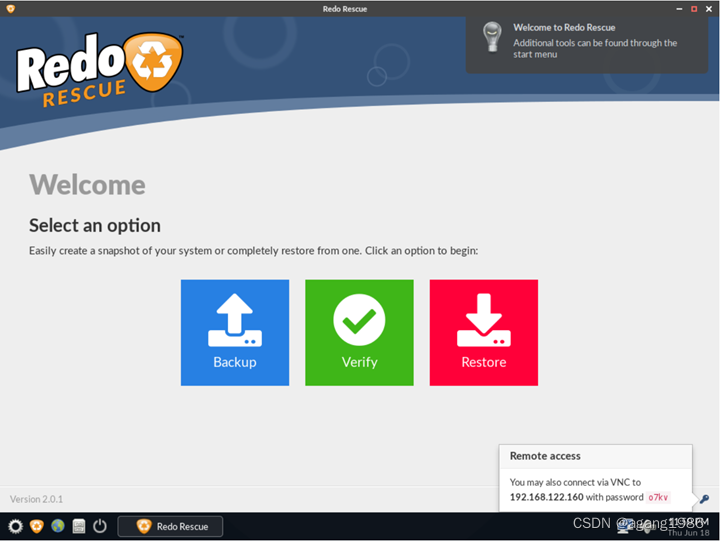
4、选择Backup
5、选择需要备份的磁盘分区,需要选择所有磁盘空间,即勾选所有。
6、选择下一步后界面如下,选择备份文件存储的位置。这里选中插入的移动硬盘。
7、选择下一步后界面如下,输入备份包的名字
8、再选择下一步即开始备份磁盘数据。
备份完成后,当前计算机硬盘的所有数据都存储到了移动硬盘上。为以后的恢复操作提供数据源。
(3)还原磁盘映像
当硬件环境发生故障无法修复时,可以使用之前备份的磁盘镜像文件快速恢复环境。
1、首先把上面制作的引导U盘和存储了备份文件的硬盘插入到目标计算机的USB口上。
2、启动计算机进入BIOS设置界面(一般是按F8或F12或Delete键进入),在Boot设置里
修改计算机引导顺序。把USB引导调整到最上面,即让计算机启动时首先进入U盘的
引导程序。
3、引导程序设置完成保存后,计算机会从U盘加载引导程序。
4、选择Restore
5、选择数据源位置,即插入的移动硬盘,然后再选择之前备份的当前计算机系统的备份文件。
6、 再选择目标磁盘位置,即当前计算机的硬盘空间,这里勾选所有的分区。需要注意的是,这里的还原目标计算机一定要用之前备份的相同计算机的备份文件,不能选错备份文件。切当前计算机的硬盘空间需要大于等于之前备份文件计算机的硬盘空间。否则还原报错。
7、 确认后,点击还原即可。
还原完成后,拔掉引导U盘和移动硬盘,重启计算机即可。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)