今天继续给大家介绍Linux运维相关知识,本文主要内容是Docker静态IP地址配置。
一、安装Docker桥接网络
在前文Docker详解(十四)——Docker网络类型详解中,我们讲解了Docker网络的四种模式。今天,我们就来实现Docker容器的静态IP地址配置。我们尝试把Docker容器以类似Vmware桥接的方式与物理机处于同一个网络内,同时拥有自己的固定IP地址。
要实现Docker容器与物理机所处统一网络,就必须首先配置当前物理机网卡的桥接网络。
其配置与KVM详解(二)——KVM安装部署一文的桥接网络配置完全一致,基本过程就是删除物理机实际网卡中有关IP地址的配置,然后创建一个桥接网卡,在桥接网卡中配置IP地址的相关信息。对上述过程还存在困惑的可以自行查看该文中的部署,在这里就不详细介绍了。
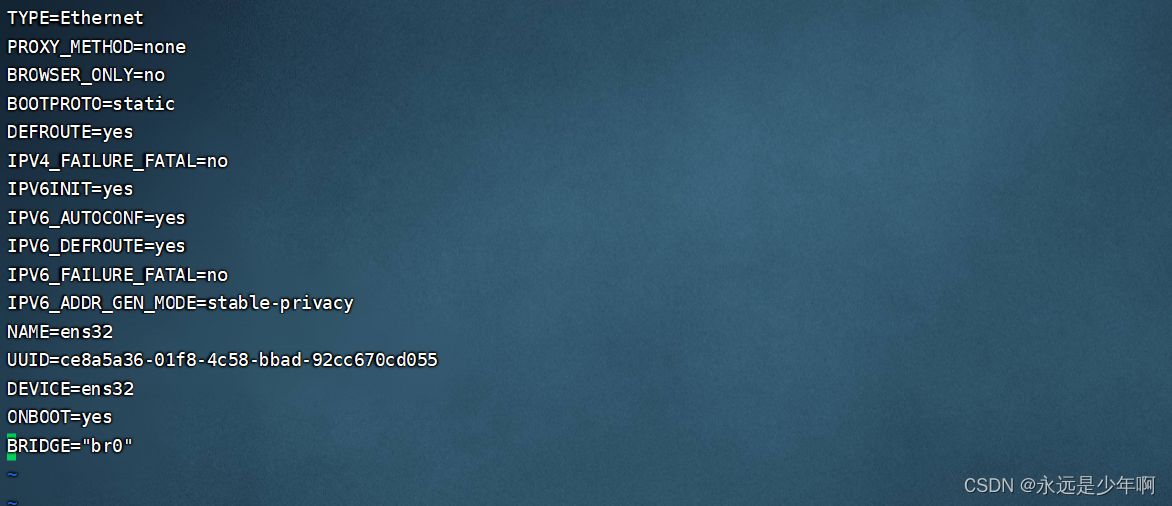
最终的物理机网卡配置如下:
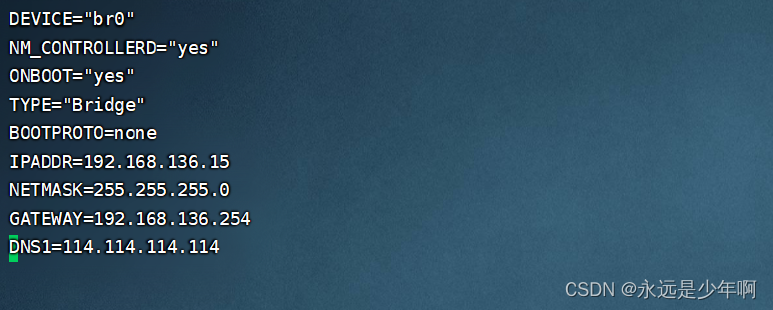
最终的物理机桥接网卡配置如下:
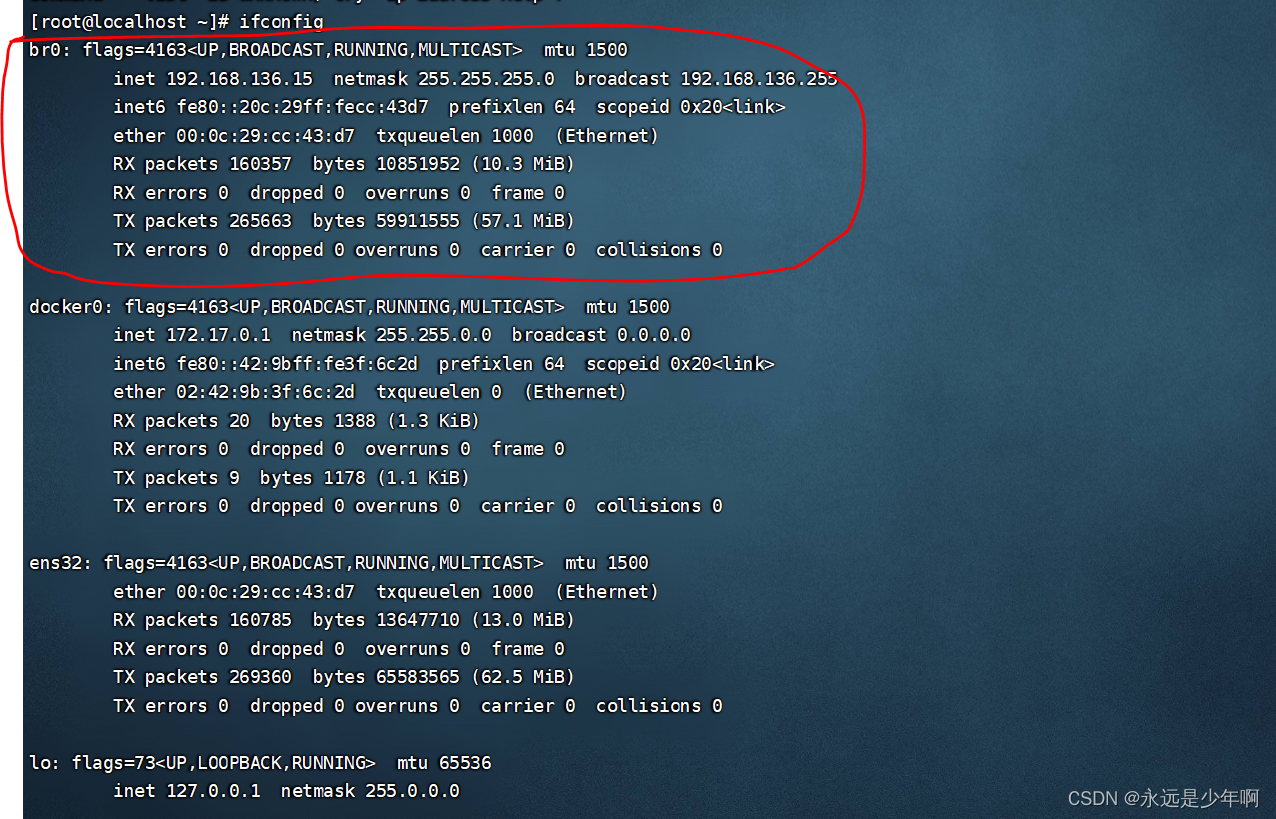
最终的物理机网络情况如下:
二、pipework的下载与使用
在我们配置好Docker的桥接网络后,实现Docker容器的静态IP设置还需要pipework的脚本。pipework脚本下载地址在Github上,其网址如下:https://github.com/jpetazzo/pipework,页面如下所示:
将该pipework包下载完成后,接下来我们解压,解压结果如下所示:
pipework不需要安装,为了使用方便,我们只需要把该启动脚本复制到/usr/bin/下即可,执行命令:
cp -a /root/pipework-master/pipework /usr/bin/
即可。
三、Docker容器启动
在完成pipework的安装后,接下来我们就可以启动Docker容器了。
我们正常启动一个Docker容器,然后再物理设备上执行命令:
pipework 【网桥名】 【容器ID】 【静态IP地址】/【子网掩码】@【网关】
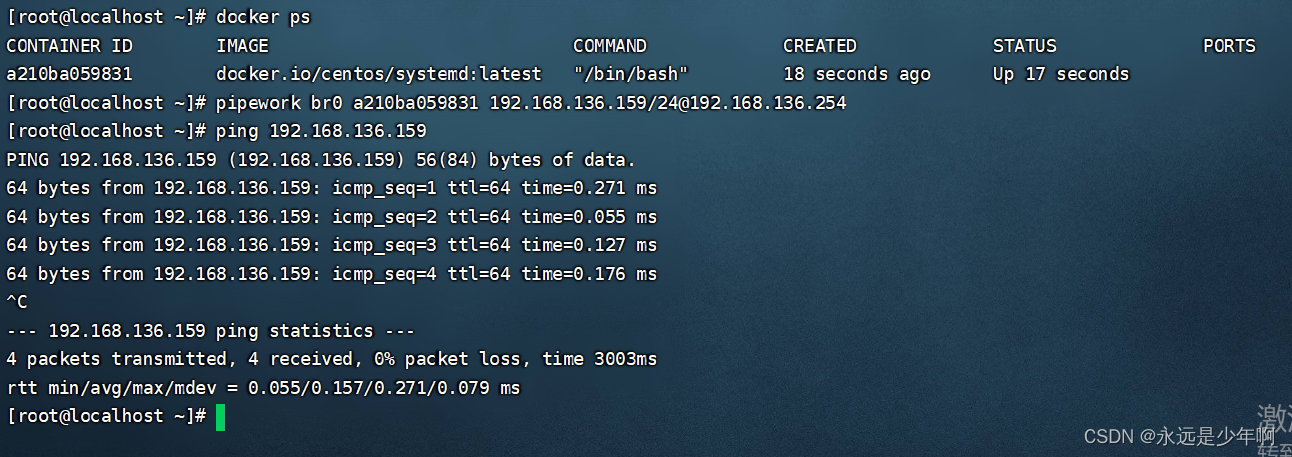
例如,我们当前物理设备的IP地址为192.168.136.15/24,我们想给Docker容器分配192.168.136.159的IP地址,那么我们可以执行以下命令:
pipework br0 a210ba059831 192.168.136.159/24@192.168.136.254
这样,该容器就会生成这样的网络配置。我们在物理设备上尝试PING该Docker容器的IP地址,发现可以PING通,如下所示:
我们在该容器中尝试PING物理设备的IP地址,发现也可以PING通,如下所示:
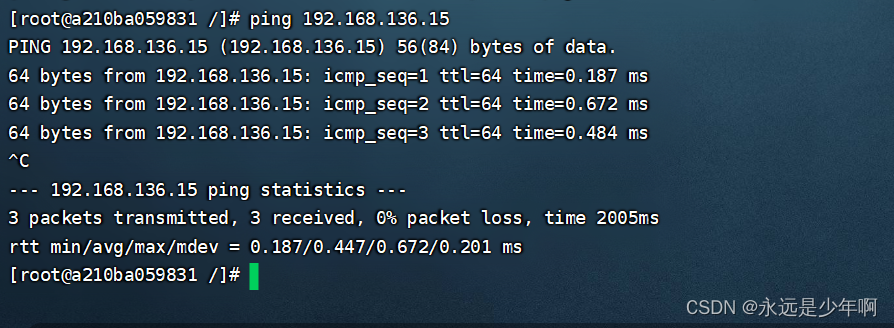
这样,我们的Docker容器静态IP地址配置实战成功!
原创不易,转载请说明出处:https://blog.csdn.net/weixin_40228200
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)