一、编译环境
1.ubuntu20.04
2.px4_V2
二、编写测试程序
下载好px4code之后,在src/examples/px4_simple_app里面有cmakelist.txt和px4_sample_app.cpp两个文件;
三、修改PX4-Autopilot/boards/px4/fmu-v2/default.cmake
想要在px4_v2的板子上运行这个测试程序,官方写的是修改PX4-Autopilot/boards/px4/fmu-v2/default.cmake这里面的code,但是最新版本的code是没有这个文件的。
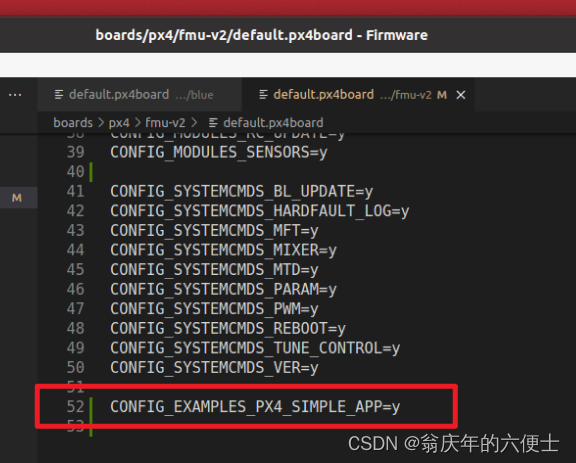
实际应该是修改boards/px4/fmu-v2/default.px4board这个文件
加入一行
CONFIG_EXAMPLES_PX4_SIMPLE_APP=y
如下图片所示:
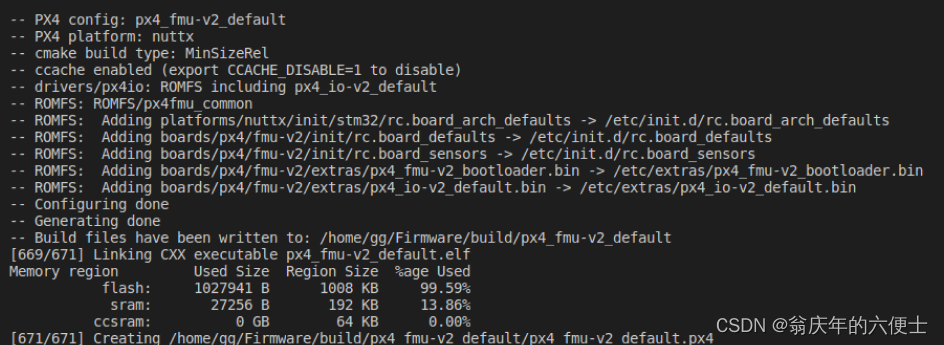
四、编译code
make px4_fmu-v2_default
最后编译结果如下图所示:
五、下载到px4_V2
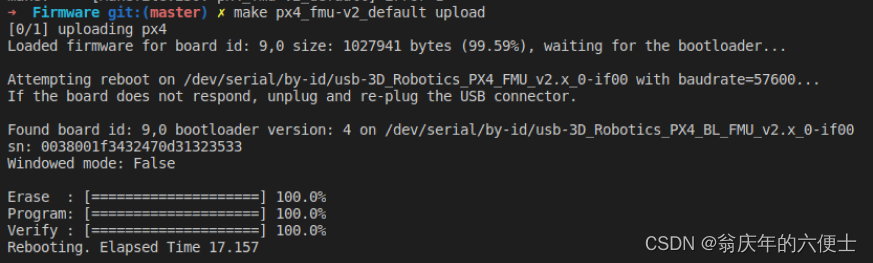
make px4_fmu-v2_default upload
下载结果如下图所示:
六、使用QGC运行测试例程
1.打开qgc(如果没有安装,请参考官方文档安装一下,很简单)
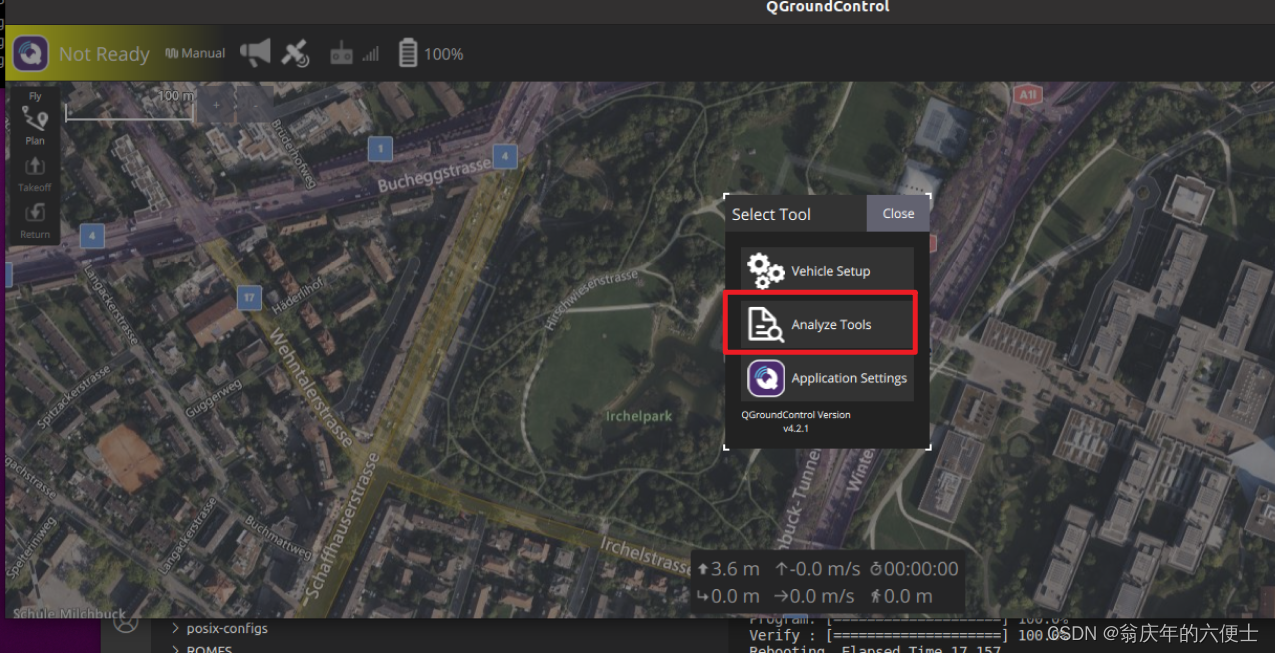
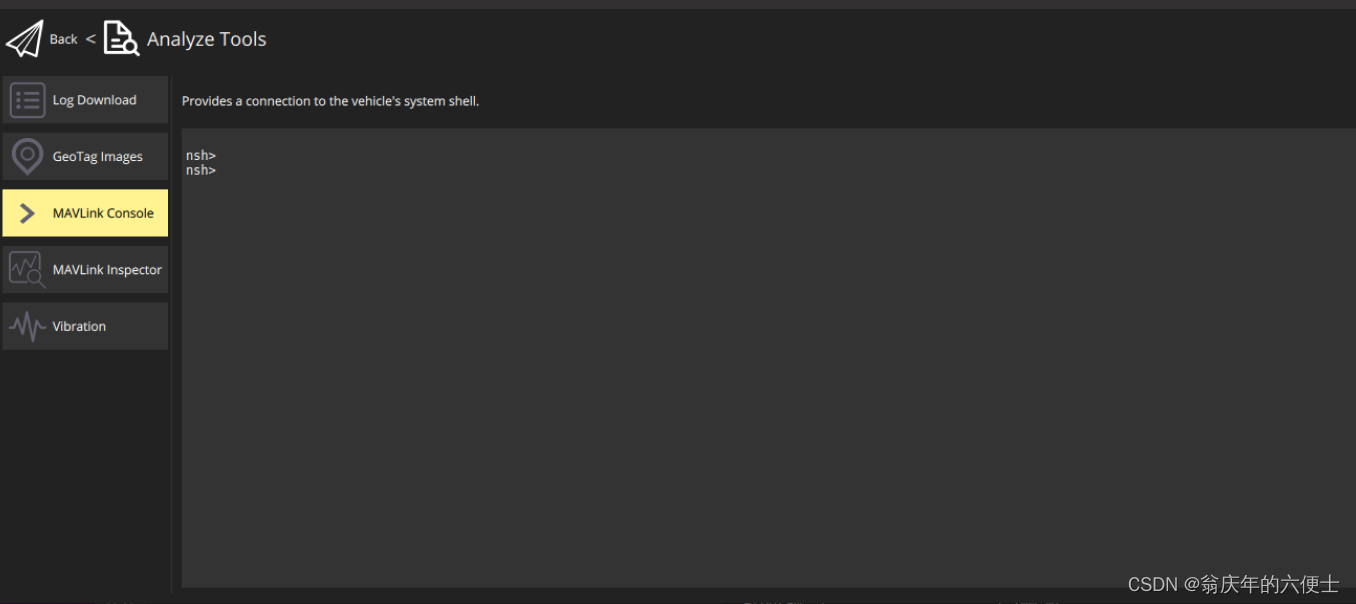
2.打开mavlink控制台
3.使用help
敲下help之后,就可以看到可以测试例程了;
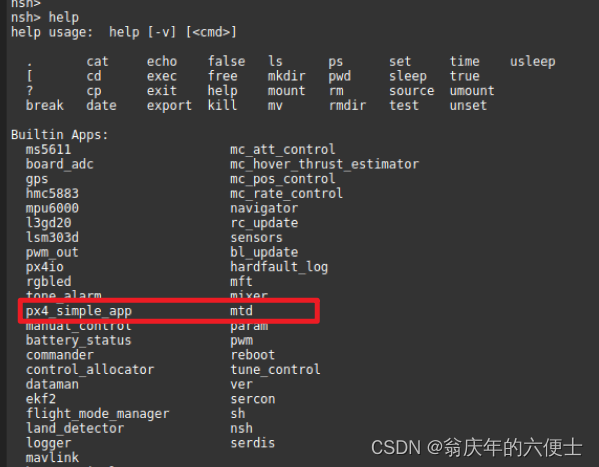
4.运行px4_simple_app
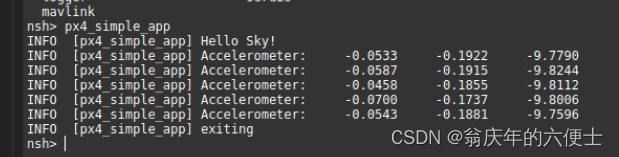
可以看到程序在板子上运行起来了;
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)