一、下载固件
在px4的git上找到相应对于硬件型号的固件;
二、 烧录固件
在qgc上,点击高级上的自定义,即可烧录相应固件;
三、 选择机架、校准传感器、设置遥控器
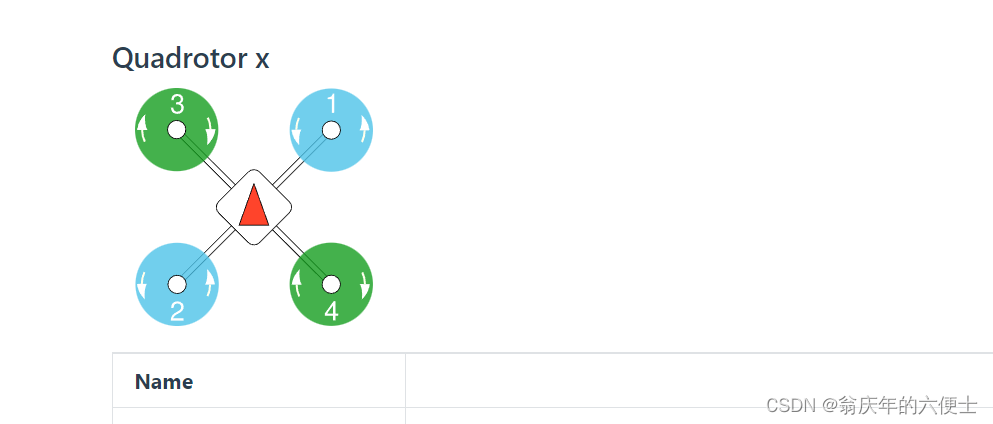
选择机架类型之后,但是不知道机架上电机的序号,可以查看PX4的指导手册;
校准磁力计、陀螺仪、加速度计;
将接收机连接到PX4之后,执行校准,按照提示,将遥感拨到相应的位置;
四、设置参数,跳过电源检查、跳过usb检查
CBRK_SUPPLY_CHK = 894281,跳过电源检查
CBRK_USB_CHK = 197848,跳过USB检查
CBRK_IO_SAFETY = 22027
五、校准电调
首先,将4个电调电机,全部连接到PX4上,并上电;
按下QGC上校准电调的按钮,此时4个电机后开始转动;
然后给PX4的power上插上电源;
最后QGC会提示校准完成,可以拔下电源,此时电机停止转动;
六、使用mavlink测试电机转向
pwm test -c 1 -p 1200 // 这是测试电机1的,测试其他电机,只需要把1改成其他数字;
不知道机架上电机的序号,可以查看PX4的指导手册;
七、准备起飞
使用遥控器,把左边摇杆打到坐下(美国手)是解锁,如果qgc报告飞行前检查有错误,前点击qgc左上角,会提示错误的原因,Pre-arm check 如果error,建议把加速度和陀螺仪校准一遍;再不行就把固件刷一遍;
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)