Python
Java
PHP
IOS
Android
Nodejs
JavaScript
Html5
Windows
Ubuntu
Linux
PIXHawk用QGC刷Firmware
2023-05-16
1.准备版本
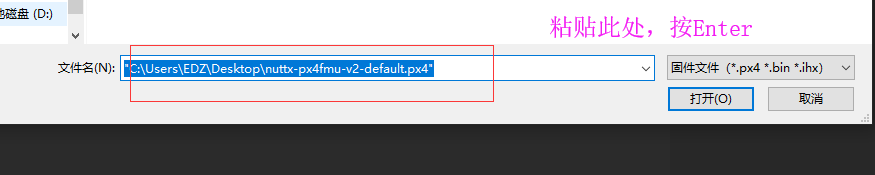
2.开始刷
确定后会出现弹窗,再弹窗的文件名处粘贴
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
PIXHAWK
QGC
firmware
PIXHawk用QGC刷Firmware 的相关文章
搜一下会发现CSDN上有不少树莓派连接Pixhawk的,或者ROS连接Pixhawk的
搜一下会发现CSDN上有不少树莓派连接Pixhawk的 xff0c 或者ROS连接Pixhawk的 xff0c 来进行相对应的实验 看来大家基本都是用Pixhawk 有很多人已经做成了 xff0c 做出来了 xff0c 所以甚至感觉没必要去
Pixhawk无人机教程-8.1 在Mission Planner中下载与分析日志(转载)
摘自 xff1a https www ncnynl com archives 201608 491 html Pixhawk无人机教程 8 1 在Mission Planner中下载与分析日志 闪存日志 目录 闪存日志日志类型 闪存 VS
PIXHAWK机架类型的的设置选择与电机通道顺序设置
1 共轴直升机 main1 左侧斜盘电机 xff0c 控制俯仰 main2 xff1a 左侧斜盘电机 xff0c 控制滚转 main3 xff1a 上面旋翼 xff0c 逆时针旋转 main4 xff1a 下面旋翼 xff0c 顺时针旋转
关于pixhawk硬件IMU和compass那点事儿
文章目录 前言一 IMU和compass是什么 xff1f 二 导航坐标系与机体坐标系三 安装IMU xff0c compasss四 hwdef中设置IMU xff0c compass朝向总结 前言 继上一篇讲解了pixhawk的硬件组成
PIXHAWK添加自定义消息存储到SD卡
四旋翼调试阶段总会出现很多难以预见的现象 xff0c 这时为了找到所出问题的原因 xff0c 就需要获得原始相关数据进行分析 xff0c pixhawk代码提供了记录飞行日志的功能 xff0c 能够将飞行中的重要数据存入SD卡中 xff0c
pixhawk调试过程中QGC报错显示问题及解决方案汇总
1 室内环境下解锁无人机 xff0c 报错 xff1a Not arming geofence RTL requiers valid home 解决 xff1a 去掉安全设置里面的地理围栏 xff0c 否则只能在有GPS的环境下解锁
Pixhawk_bootloader简介
Pixhawk Bootloader引导过程简介 自己结合网络上的资源总结的内容 有不对的地方请及时指出 有侵权的请指出 QQ 4862879 Pixhawk硬件使用STM32的芯片 Cortex M3的内核有三种启动方式 xff0c 其分
Pixhawk飞行模式的讨论
手动模式 offboard 地面站 操控的区别 使用遥控操纵的模式 Simple and Super Simple 选项 加了这个选项之后 xff0c 它的磁力计会记录飞机解锁时 xff0c 朝向就是无人机的前方 每个飞行模式的旁边都有一个
pixhawk commander.cpp的飞行模式切换解读
commander cpp逻辑性太强了 xff0c 涉及整个系统的运作 xff0c 所以分别拆分成小块看 另此篇blog大部分是参考 xff08 Pixhawk原生固件解读 xff09 飞行模式 xff0c 控制模式的思路 xff0c 笔者
Pixhawk代码分析-源码框架
源码框架 pixhawk代码框架 xff1a pixhawk代码框架基础分析 xff1a 阅读下面内容时请结合源码阅读 xff0c 便于理解 The basic structure of ArduPilot is broken up int
pixhawk: px4代码初学分析:追溯电机控制--pwm输出
追溯电机控制 pwm输出 正常工作状态下pwm输出过程简述 xff1a 其他状态下pwm输出 xff1a 正常工作状态下pwm输出过程简述 xff1a 姿态解算部分得出姿态控制量通过px4io cpp把姿态控制量发送给IOIO串口读取姿态控
【Pixhawk】注册一个字符型驱动设备
最近学习Pixhawk的SPI xff0c 本以为PX4是STM32单片机而已 xff0c 写个SPI驱动应该很简单 但是当我看到mpu9250的那些cpp文件 xff0c 我一下就蒙了 由于PX4用的NUTTX系统 xff0c 类似Lin
pixhawk接口图以及引脚说明
pixhawk接口图和引脚如下 pixhawk可以同时使用2个GPS xff0c 这只能使用其中一个罗盘 xff0c 实际中飞控挑选其中信号好的一个GPS进行定位 硬件部分 xff1a 第二个GPS插在serial 4 5接口上 xff0c
搭建pixhawk飞控无人小车--替换自带遥控器
因为小车原装遥控器接收机和电调版整合在一个小板子上 xff0c 且没有相关资料 xff0c 无法接入飞控 因此单独购买遥控器 在某宝上购买富斯遥控器i6 xff0c 总共六个通道 三个双向开关 一个三向开关 遥控器简单入门视频如下 xff0
QGC4.1.2二次开发(2)QGC连接与数据收发
文章目录 前言一 连接原理二 连接过程与数据收发1 连接过程 xff08 以串口为例 xff09 2 数据发送 总结 前言 QGC连接无人机飞控时支持多种连接方式 xff0c 并且可以自动连接 xff0c 不由让人好奇它的实现原理 xff0
DroneKit教程(二):控制Pixhawk示例
DroneKit教程 xff08 二 xff09 xff1a 控制Pixhawk示例 本篇提供了一个简单的示例 xff0c 配以详细的注释说明不同语句的功能 xff0c 希望能给各位一个总体的框架和印象 该示例文件改写自DroneKit的官
DroneKit教程(三):连接Pixhawk飞控
DroneKit教程 xff08 三 xff09 xff1a 连接Pixhawk飞控 DroneKit提供了非常简便的代码 xff0c 可通过多种方式与飞控连接 连接飞控 使用DroneKit中的connect函数 xff0c 可以方便地连
自己组装Pixhawk F450无人机的一些细节
首先参考文档为 xff1a 1 https mp weixin qq com s VXKU kIB v i0AX3zgtLig 2 https mp weixin qq com s Qzzl dQ6Tz2pXNp7Oj0lTg 3 http
pixhawk 整体架构的认识
此篇blog的目的是对px4工程有一个整体认识 xff0c 对各个信号的流向有个了解 xff0c 以及控制算法采用的控制框架 PX4自动驾驶仪软件 可分为三大部分 xff1a 实时操作系统 中间件和飞行控制栈 1 NuttX实时操作系统 提
iPhone 检查固件版本
HI all 我想为 iPhone 2 2 和 3 0 版本制作一款应用程序 2 2 中的某些方法在 3 0 中已弃用 如 UITableViewCell setText 和 setLabel 有什么方法可以检查 iPhone 上使用的固件
随机推荐
MATLAB二维图形坐标变换
图形绘制及坐标变换 矩形的绘制和坐标变换示例 MATLAB代码 思考为什么用MATLAB xff1f 矩阵适合作坐标变换 xff0c 而C语言的数组则较为麻烦 xff0c 需要创建二维数组 xff0c 写for循环 xff1b 方法一 xf
毁伤评估总结
毁伤评估总结 计算部分 xff08 1 xff09 破片飞散速度计算 Gurney公式 xff1a 计算破片初速度 v 0 61 2
ORB_SLAM2编译及试运行(含ROS)
ORB SLAM2 github project linkORB SLAM2的安装与运行 Build and examples span class token function cd span ORB SLAM2 span class t
基于gazebo的四旋翼无人机iris双目相机ORB_SLAM2
gazebo环境中的四旋翼双目ORB仿真 ORB SLAM2的编译 github project linkORB SLAM2的安装与运行 Build span class token function cd span ORB SLAM2 s
CAS 数据库校验
1 UnknownUsernameAuthenticationException gt BadUsernameOrPasswordAuthenticationException gt BadCredentialsAuthentication
VINS-Fusion、CCM-SLAM、COVINS、ORB-SLAM3编译
VINS Fusion project link on github Build span class token builtin class name cd span catkin ws src span class token func
CCM_SLAM多无人机视觉SLAM仿真(gazebo环境)
0 偷师学艺 follow instructions For using you own datasets or camera you need to create according calibration and launch file
Mavros控制无人机在gazebo环境下进行双目SLAM
Mavros控制无人机在gazebo环境下进行双目SLAM 在这里先放参考 xff0c 键盘控制主要是从初接触ROS时的turtlesim功能包下的键盘控制节点得到的方法 参考 ROS tutorial turtle teleop key
ORB-SLAM2,ORB-SLAM3,ROS编译的Syntax check of ORB_SLAM2/manifest.xml failed解决
OpenCV version 3 xEigen version 3 xUbuntu version 20 04ros version noeticpython V 2 7 18python3 V 3 8 10 build sh正常编译 xf
Hybrid A*论文,Practical Search Techniques in Path Planning for Autonomous Driving笔记
Practical Search Techniques in Path Planning for Autonomous Driving Code reference here KTH GitHub repository based on R
传统网格中心的A*算法回顾
A 算法回顾
Hybrid A*示例代码KTH的path_planner分析
Hybrid A star Algorithm Analysis updating 1 Data Flow in main cpp span class token comment init ros node span ros span c
算法:如何对任务进行调度
1 假设有一个中央调度机 xff0c 有n个相同的任务需要调度到m台服务器上去执行 xff0c 由于每台服务器配置不一样 xff0c 因此 xff0c 服务器执行一个任务所花费的时间也不同 xff0c 第i个服务器执行一个任务所花费的时间也
PELCO-D协议
由于项目的需要 xff0c 近期对云台控制协议PELCO D进行了研究 xff0c 现对云台控制说明书中的信息进行笔记记录 PELCO D协议通过命令报文控制云台 xff0c 通过返回信息对云台位置进行实时监控 PELCO D控制命令格式如
URL读数据、Configuration类、HDFS 的API操作
从Hadoop URL 读取数据 使用java net URL对象文件打开数据流 xff0c 从hadoop文件系统中读取文件 注意 xff1a 不支持通过URL方式进行写操作 让java程序能识别Hadoop中的hdfs URL方案还需要
iptables-ipset仅允许国内访问---端口白名单
前言 xff1a 境外肉鸡攻击有点多 xff0c 并业务无境外访问需求 xff0c IDC机房网络防火墙无法实现8K多条的china大陆地址导入 xff1b 为实现仅china大陆地址访问 xff0c 在业务端口如这里的80 xff0c 使
什么是任务栈?
在一个裸机系统中 xff0c 如果有全局变量 xff0c 有子函数调用 xff0c 有中断发生 那么系统在运行的时候 xff0c 全局变量放在哪里 xff0c 子函数调用时 xff0c 局部变量放在哪里 xff0c 中断发生时 xff0c
Ubuntu vscode 配置c/c++环境 ---- 静态代码检查
我曾一度因为vscode中c语言的静态代码检查问题而困扰 xff0c 想想还是太懒了 xff0c 不愿意折腾 xff0c 今天搞一下 首先在ubuntu中装vscode xff0c xff0c xff0c 然后装clang span cla
ubuntu22.04 运行qq音乐闪退
修改 usr share applications中的qqmusic desktop xff0c 在Exec后加上 no sandbox 如下图所示 xff1a
PIXHawk用QGC刷Firmware
1 准备版本 2 开始刷 确定后会出现弹窗 xff0c 再弹窗的文件名处粘贴
热门标签
npmbuild
mlint
linklabel
rjsonio
nodecanvas
ansisql92
mailcore
yieldfrom
mention
mailqueue
huxley
wix39
rubikscube
nidaqmx
qwik
opengles11
rspecmocks
dvb
rfc3161
facttable