目录
- O、前言
-
- 一、六步换相
- 1 新建cubemx工程
- 2 工程基础配置
- (1)RCC时钟配置
- (2)SYS 调试接口
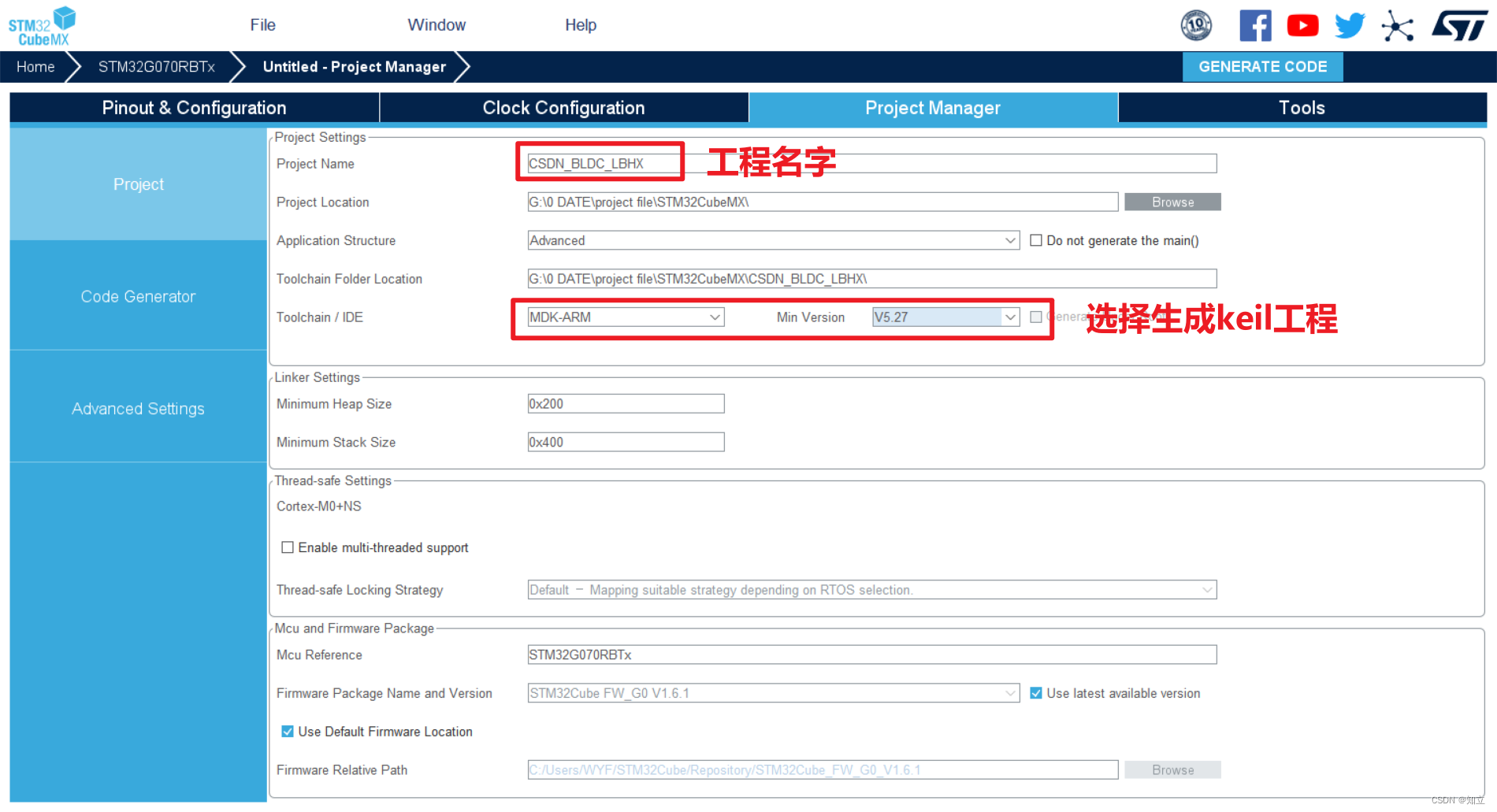
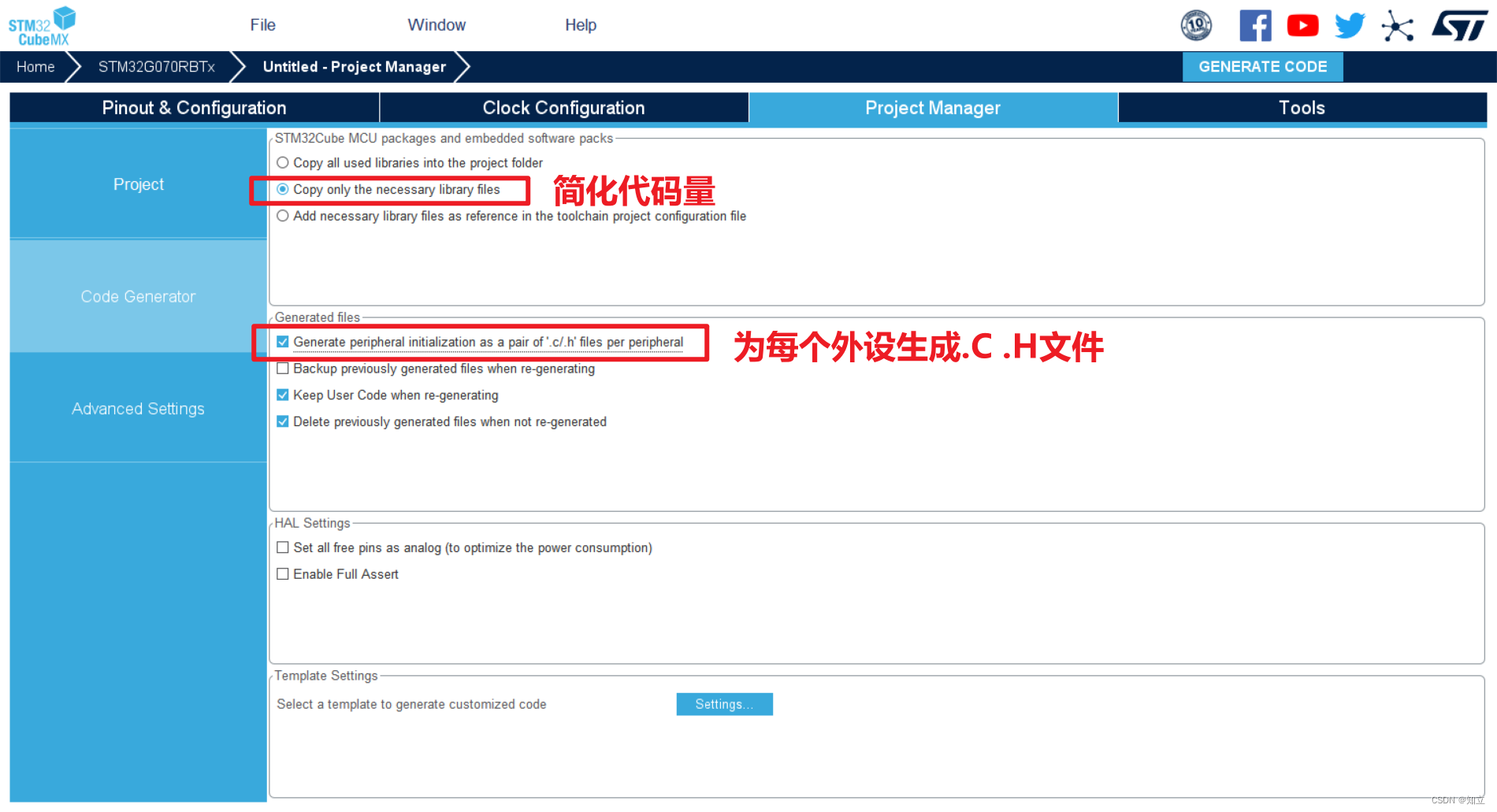
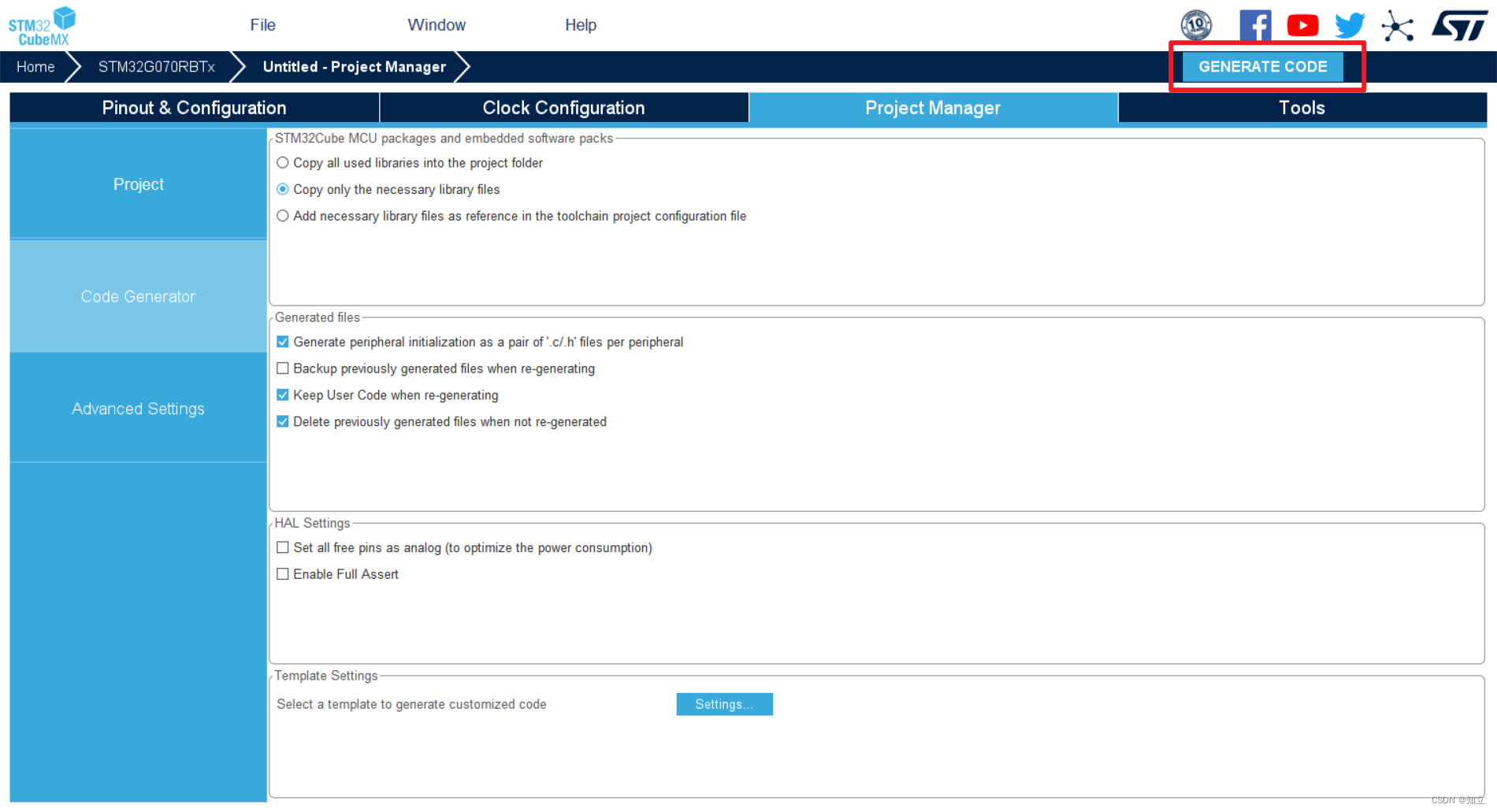
- (3)工程设置,生成MDK工程
- 3 串口
- (1)cubemx配置
- (2)printf重映射
- (3)测试
- 4 霍尔传感器
- (1)Cubemx配置
- (2)初始化启动
- (3)测试定时中断
- (4)测试霍尔中断
- 4 开环控制
- (1)普通PWM cubemx配置
- (2)普通GPIO配置
- (3)开环控制
- 二、FOC
O、前言
- 用作备忘录,也希望能帮助正在入门摸索的朋友少走弯路,从外设开始,到开环,到闭环。
- 参考文章代码:正点原子、野火、硬石,三家文档几乎一样。(个人感觉原子文档写的好)
1 个人经验
- 刚开始学无刷电机控制时是直接去看的FOC,网上理论一大堆,看了几天,理论大概明白了,想去实践编程,发现都是大多都是电机库,或者一些别人的完整代码,没有步骤教学。经过一顿摸索,我的结论是把理论化为单片机代码实际去控制电机的过程,某种程度上比学习理论更困难。
- 我个人做一些单片机小项目的习惯是从头开始做。从一个空白工程开始,一个外设一个外设的调,调通一个测试一个,要用的所有外设调完再去加入控制代码,由开环到闭环,一步一步的来。直接用别人写好的一套代码总感觉心里没底。
- 对于无刷电机控制,我的步骤是这样的:1调霍尔传感器,2调PWM,3调开环控制,4调闭环
2 软硬件介绍
- 软件:STM32cubemx+keil5
- 硬件:网上买的一块无刷电机驱动板,芯片是STM32G070。要注意的是我的电机是BLDC,2对极,间隔60度安装的霍尔传感器。所以我现在实现的都是 基于霍尔传感器的开闭环控制。暂时没整过基于编码器的、基于无感的。
一、六步换相
- 六步换向用到的单片机外设:(根据个人板子引脚要做一些修改)
- TIM3:选择霍尔传感器模式,用于获取3个霍尔值。
- TIM1:通道123,普通PWM模式,用于驱动半桥电路的3个上半桥。(因为我这边用的是HPWM-LON的控制。)
- 普通IO:3个,推挽输出,用于驱动半桥电路的3个下半桥。
- USART2:用于调试用。
- RTC:用于闭环控制。(这个用RTC中断可能不太合适,但是暂时这样…)
- 代码整体的调用流程:
- 开环:电机转动换相时,触发霍尔中断,在霍尔中断回调函数里读取当前的相位值,然后根据相位值进行换相。
- 闭环:在开环的基础上,再开一个定时器,在里边做PID运算,更改占空比设定值。
- 六步换向-开环控制代码:https://github.com/wyfroom/BLDC_LiuBu_KaiHuan_hall
- 六步换向-闭环控制代码:
1 新建cubemx工程
2 工程基础配置
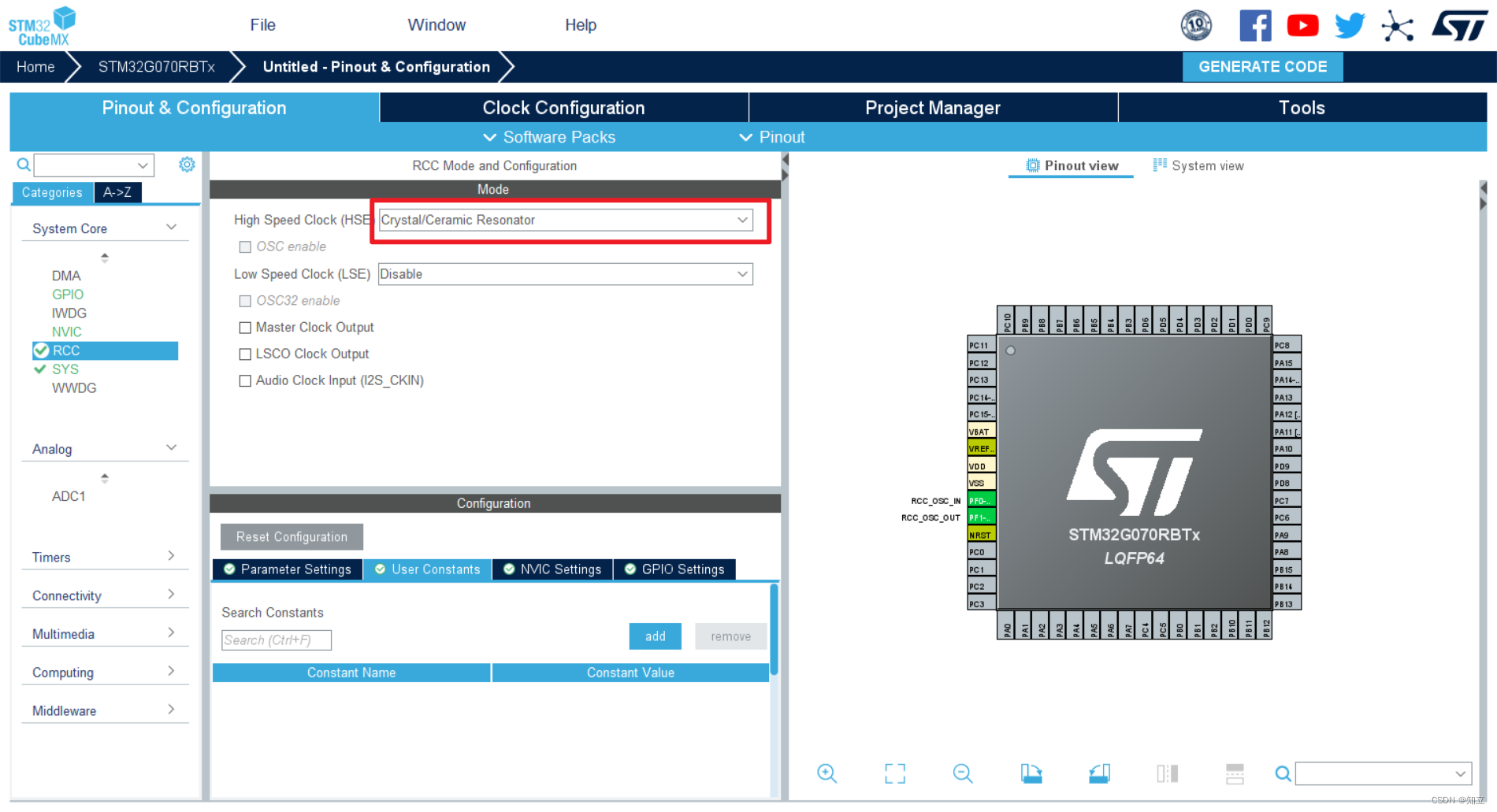
(1)RCC时钟配置
- 选择时钟源,我这块板子只有外部8M晶振。
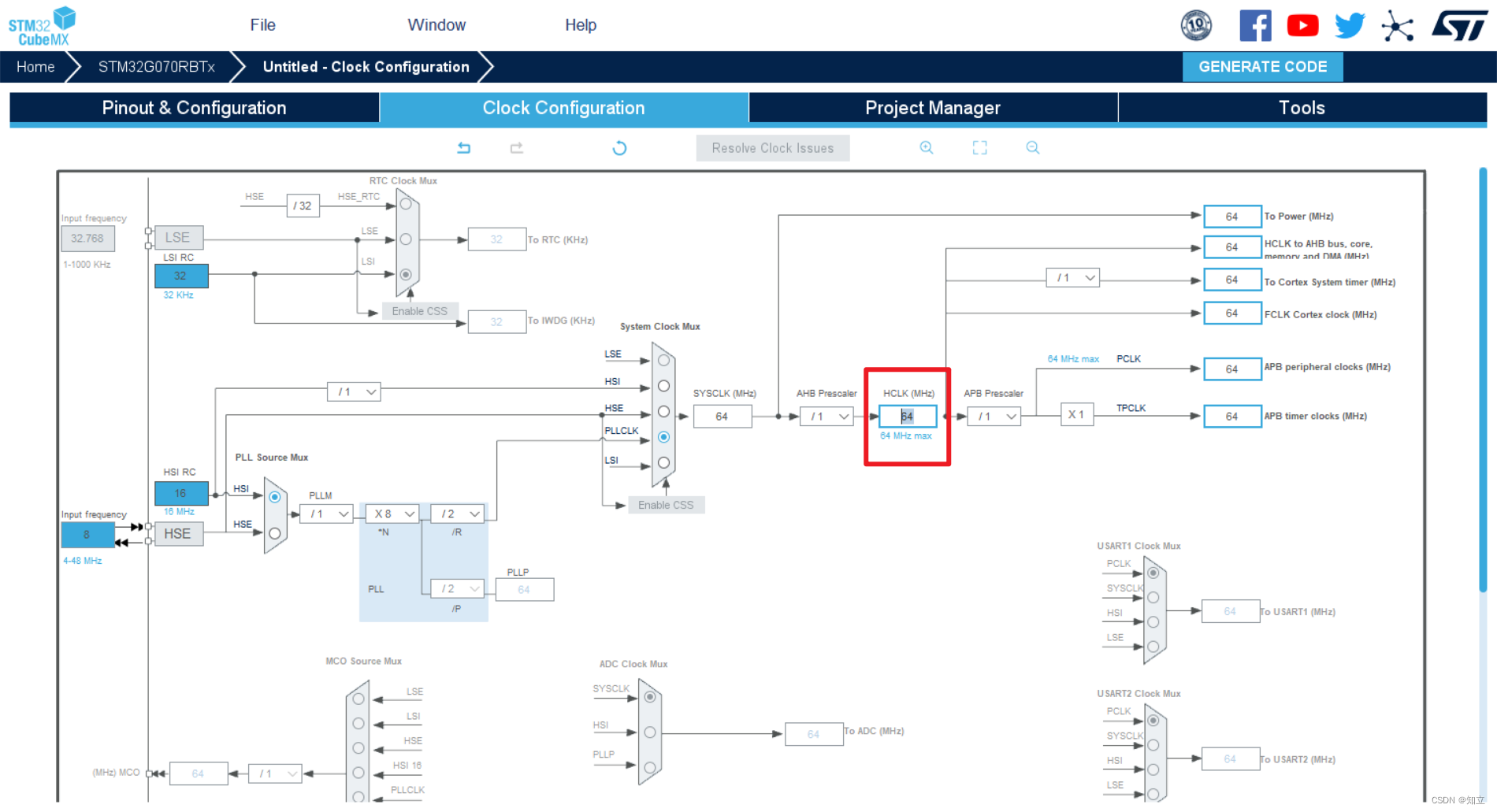
- 手动输入最大时钟频率,然后回车。我这块板子是64M。
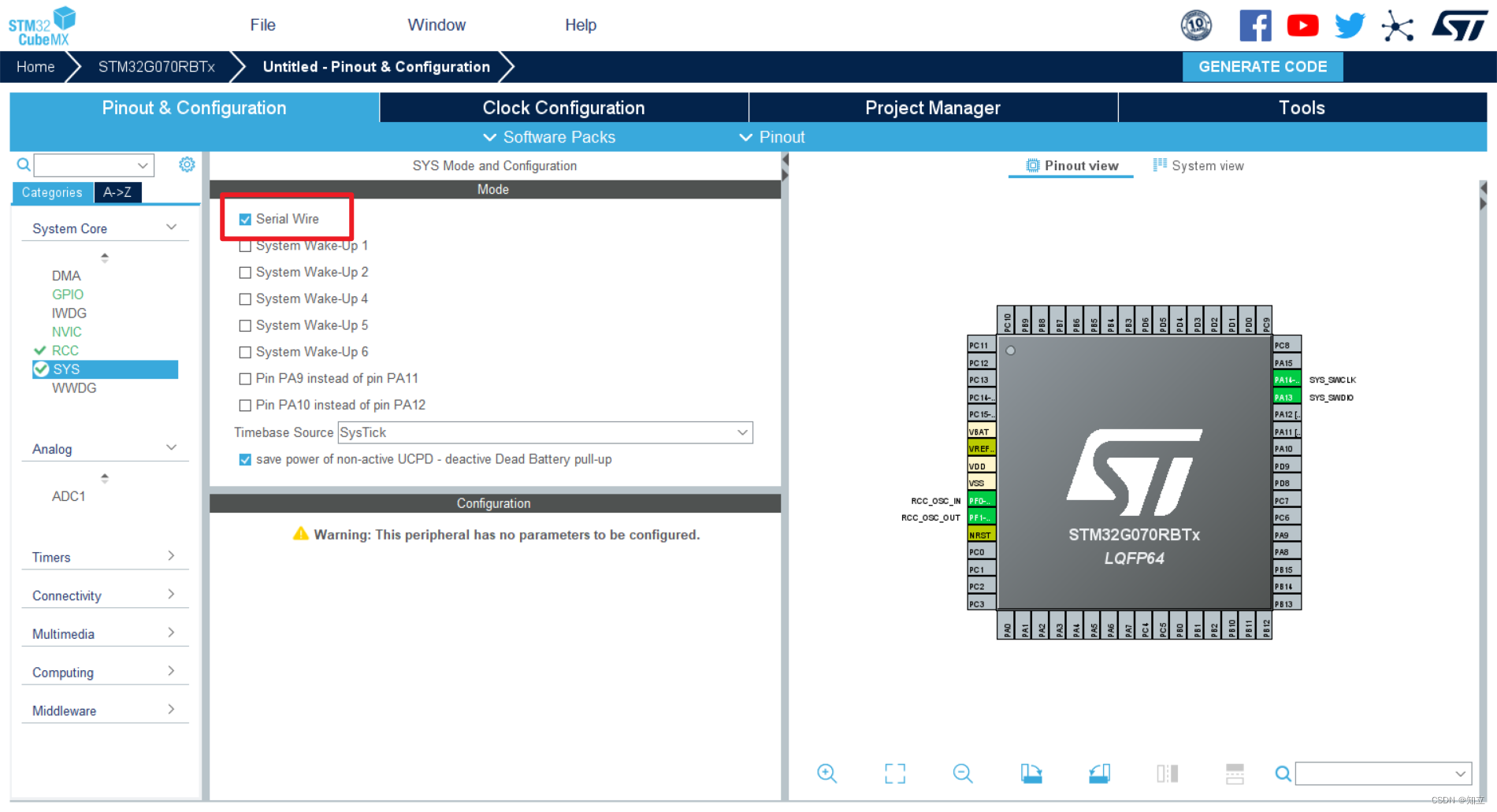
(2)SYS 调试接口
- 我的下载器是SWD两根线的,所以我选这个。
(3)工程设置,生成MDK工程
- 点击生成代码
3 串口
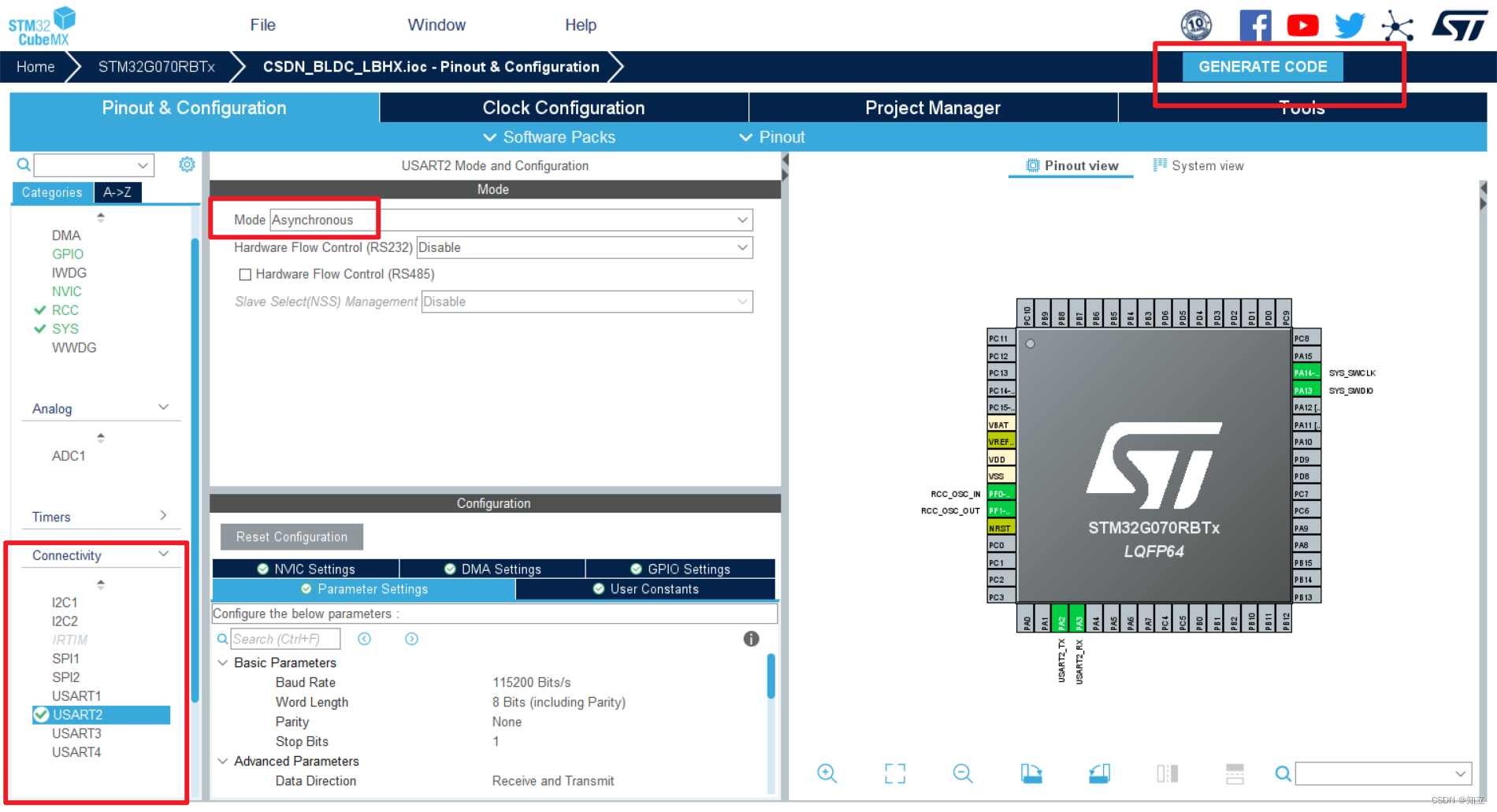
- 这快板子没显示屏,调试中串口还是很有必要。
- 我这块板子是串口2,看好引脚,串口自动配置的引脚不一定是板子上的。比如我这块板子,就不是这两引脚。
(1)cubemx配置
(2)printf重映射
- 添加如下代码到工程的 usart.c 文件中的 /* USER CODE BEGIN 0 / 和 / USER CODE END 0 */之间。
#include <stdio.h>
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
HAL_UART_Transmit(&huart2, (uint8_t *)&ch, 1 , 0xffff);
return ch;
}
- 在main.c里添加头文件 #include <stdio.h>

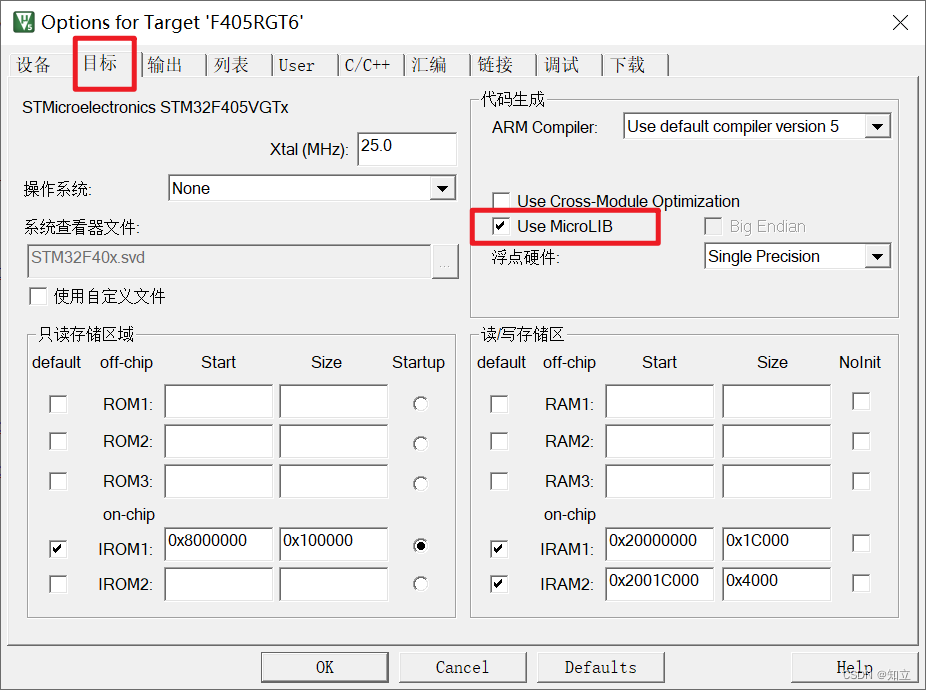
- 之前忘记说了,这个printf重映射要在keil里也设置一下,不然一使用printf单片机就会卡死。抱歉抱歉(2023.3.30)
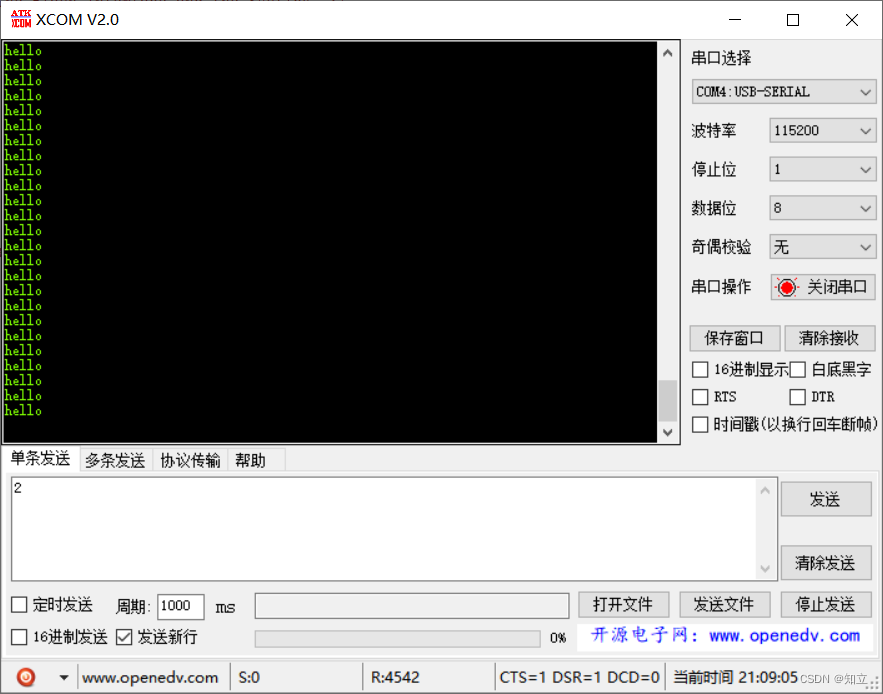
(3)测试
printf("hello\r\n");
HAL_Delay(1000);

4 霍尔传感器
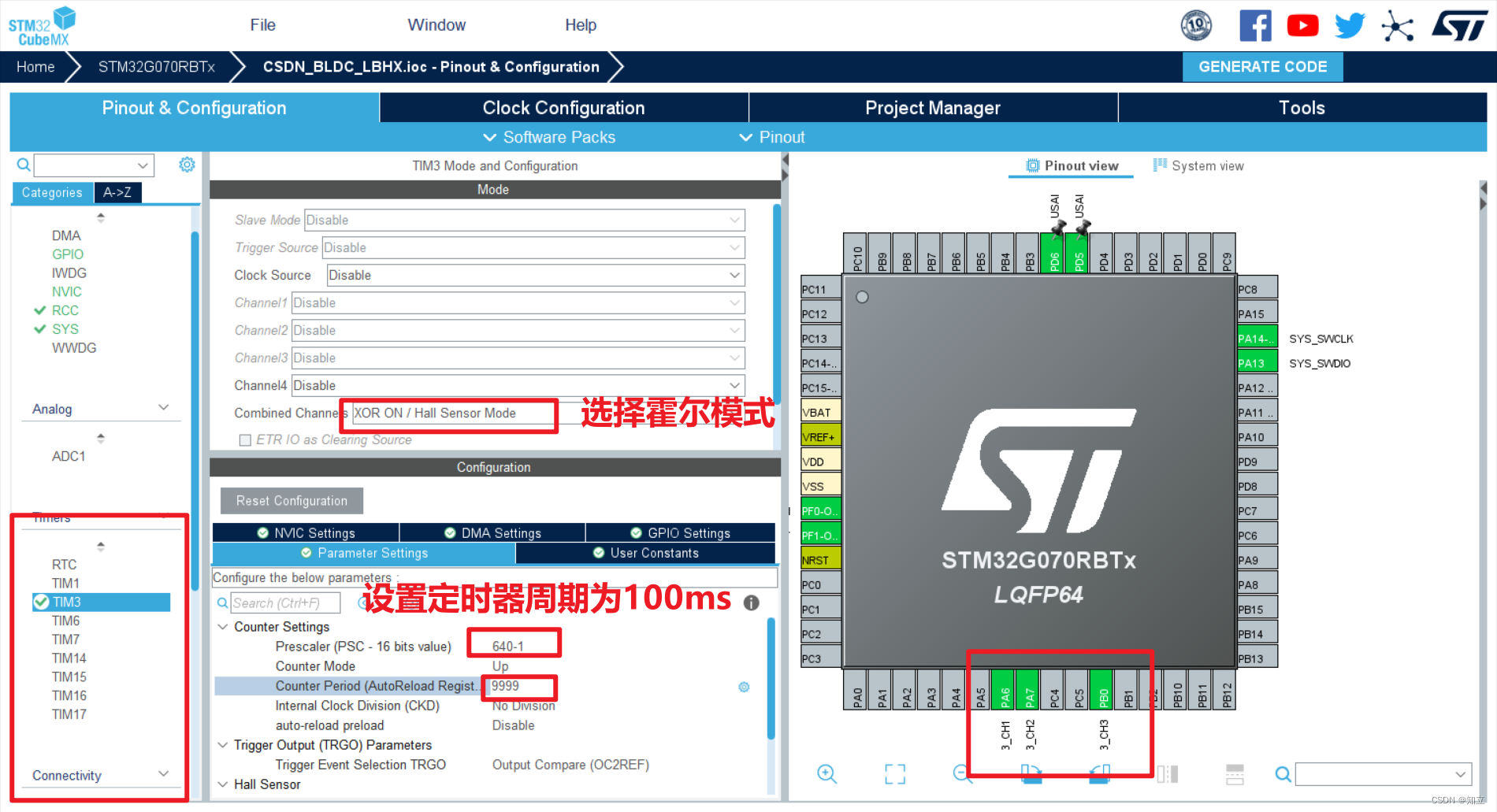
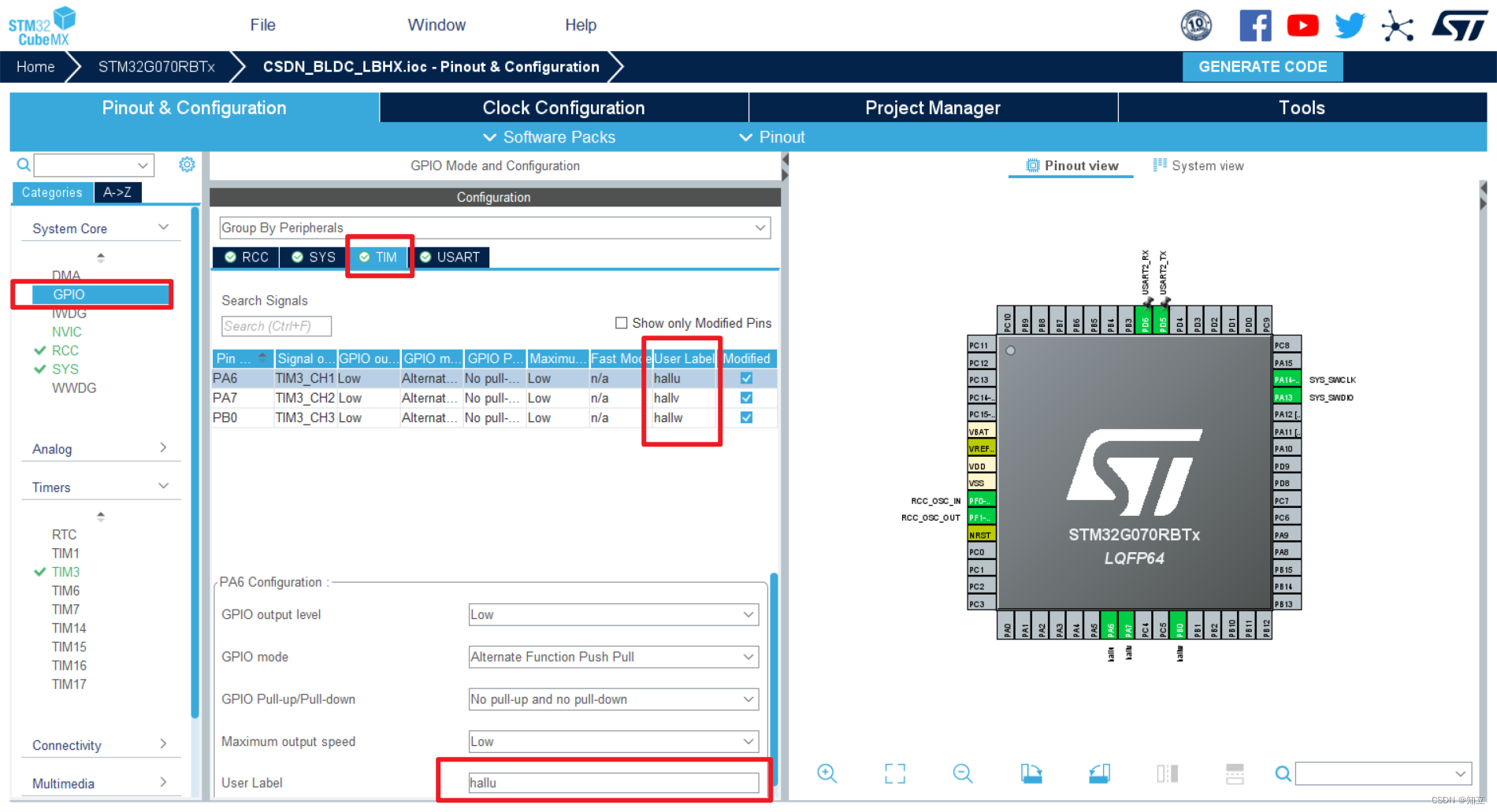
(1)Cubemx配置
- 32定时器有一种霍尔模式,专门为无刷电机霍尔控制整的叭。
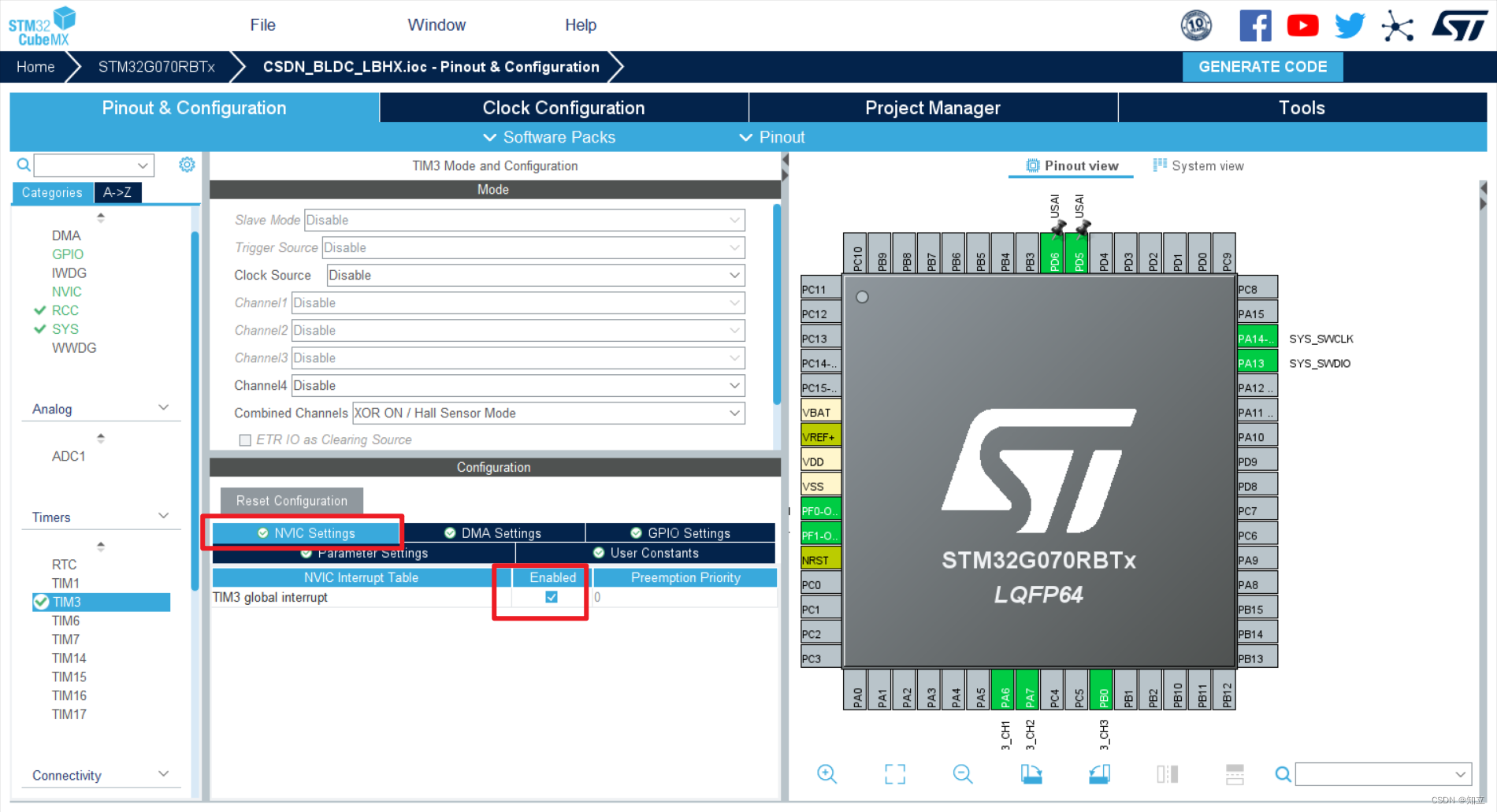
- 打开定时器中断
- 更改引脚名称(可选),为了编程方便
(2)初始化启动
在main中加入下面启动代码。
__HAL_TIM_ENABLE_IT(&htim3,TIM_IT_TRIGGER);
__HAL_TIM_ENABLE_IT(&htim3,TIM_IT_UPDATE);
HAL_TIMEx_HallSensor_Start_IT(&htim3);
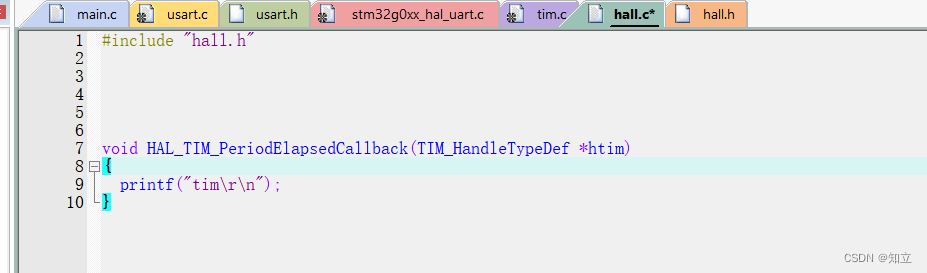
(3)测试定时中断
- 在工程里新建两个文件:hall.c、hall.h。在main里加头文件。
- 加入下面中断回调函数,先测基本定时器中断,串口助手看现象。
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
printf("tim\r\n");
}
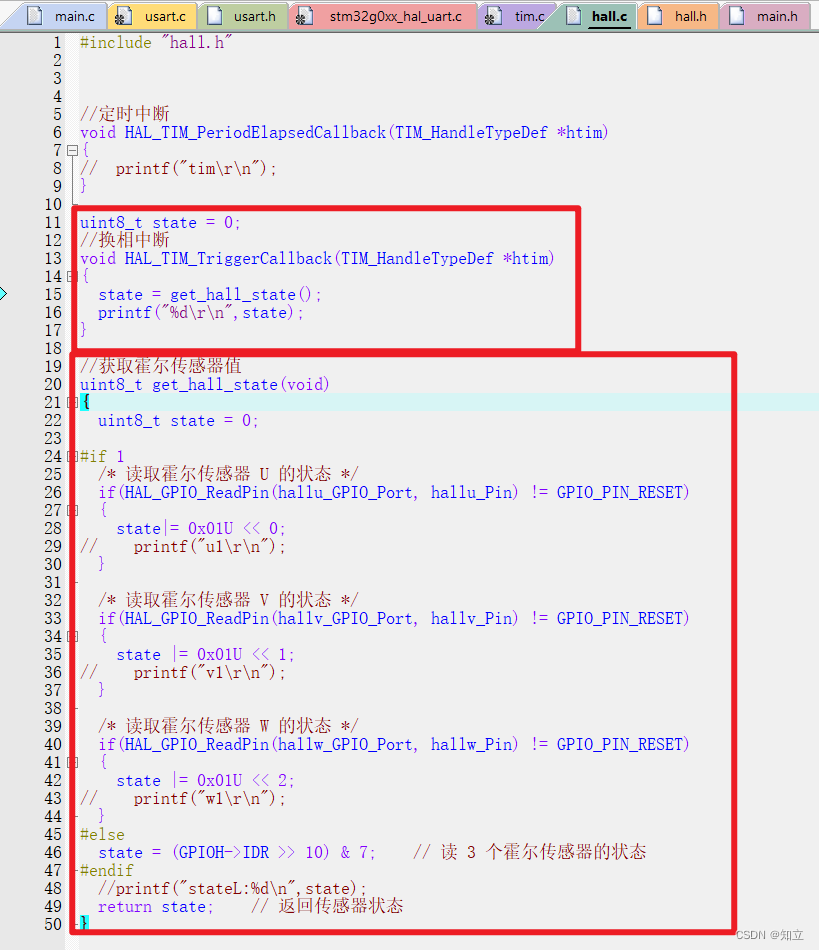
(4)测试霍尔中断
uint8_t state = 0;
void HAL_TIM_TriggerCallback(TIM_HandleTypeDef *htim)
{
state = get_hall_state();
printf("%d\r\n",state);
}
uint8_t get_hall_state(void)
{
uint8_t state = 0;
#if 1
if(HAL_GPIO_ReadPin(hallu_GPIO_Port, hallu_Pin) != GPIO_PIN_RESET)
{
state|= 0x01U << 0;
}
if(HAL_GPIO_ReadPin(hallv_GPIO_Port, hallv_Pin) != GPIO_PIN_RESET)
{
state |= 0x01U << 1;
}
if(HAL_GPIO_ReadPin(hallw_GPIO_Port, hallw_Pin) != GPIO_PIN_RESET)
{
state |= 0x01U << 2;
}
#else
state = (GPIOH->IDR >> 10) & 7;
#endif
return state;
}
- 把电机霍尔接口接到板子上,用手转动电机,能看到串口打印出此时电机对应的霍尔编码值。

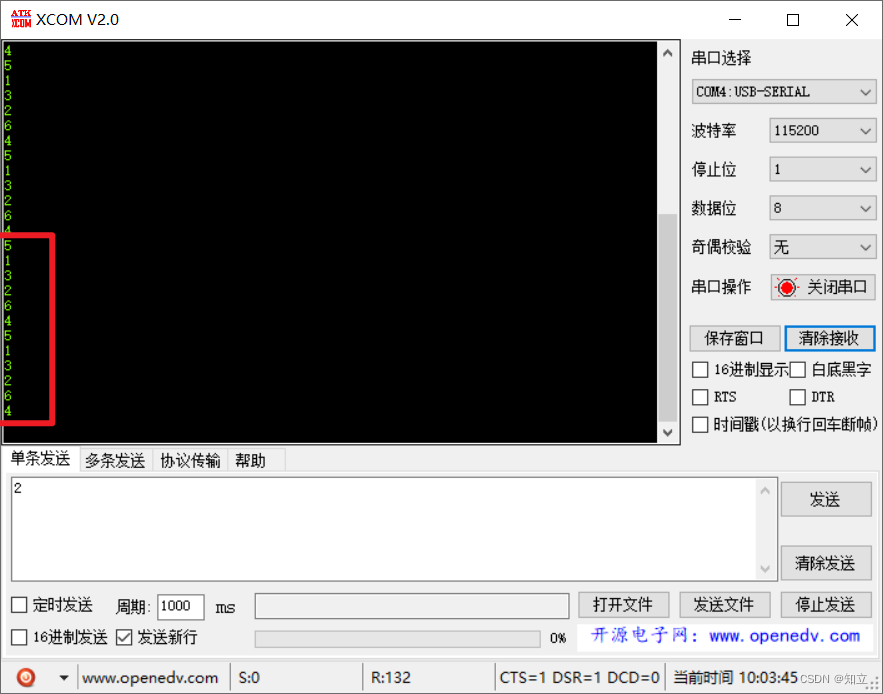
- 这个时候霍尔的状态值读回来了,也就是什么时候换相可以知道了,下一步就是驱动全桥电路,用3个普通PWM+3个普通IO口。
4 开环控制
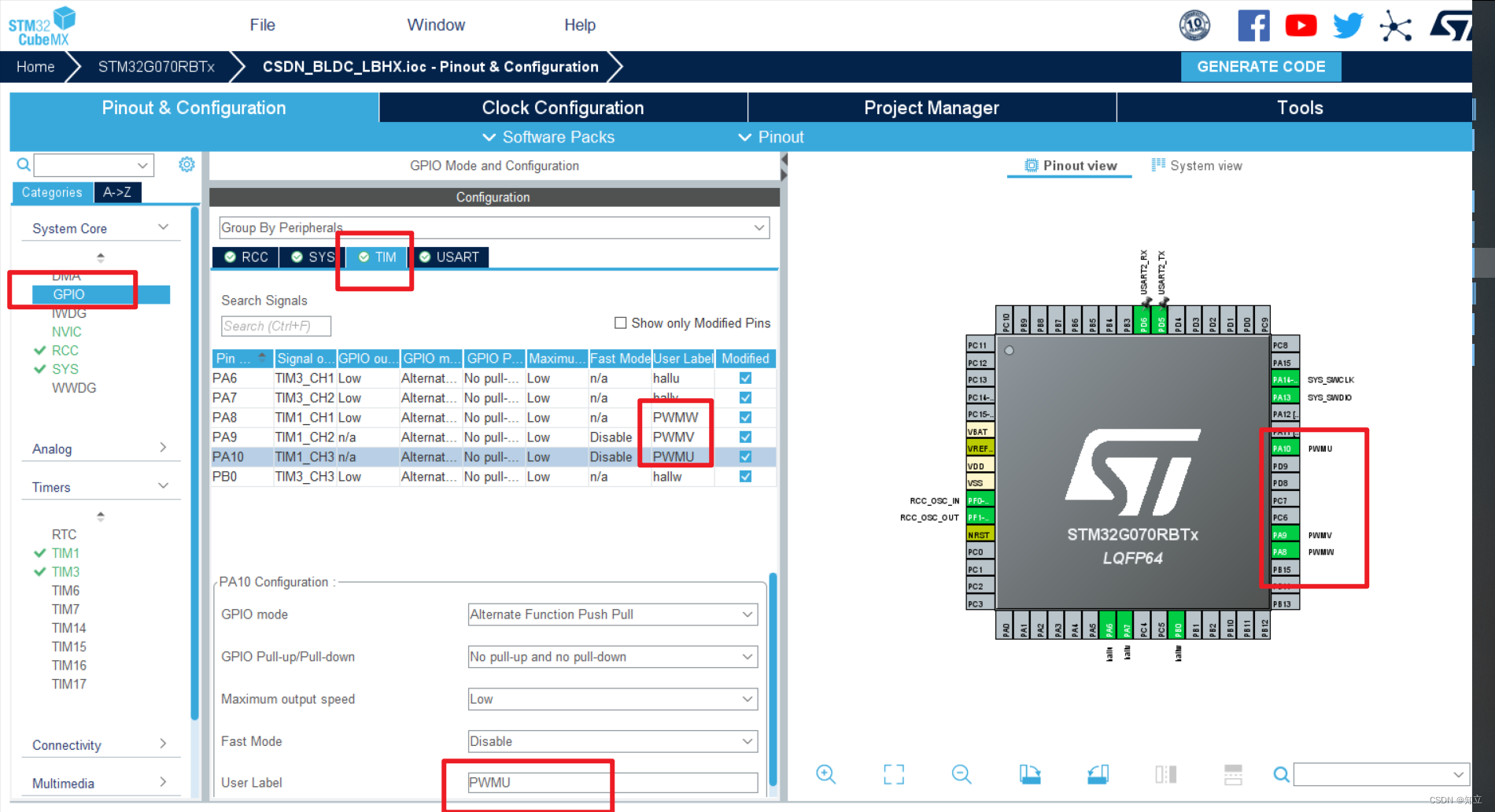
(1)普通PWM cubemx配置
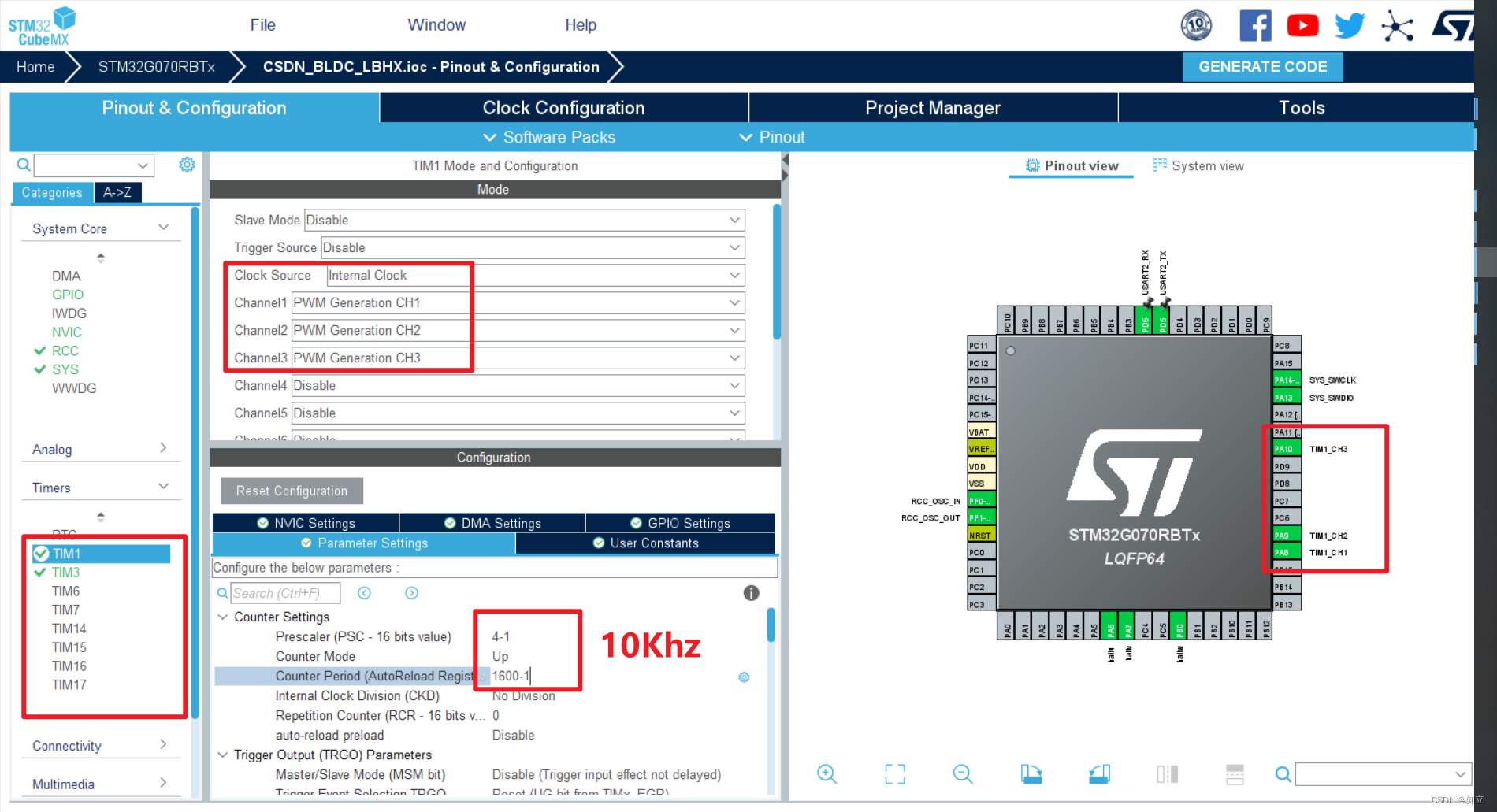
- 更改引脚名字
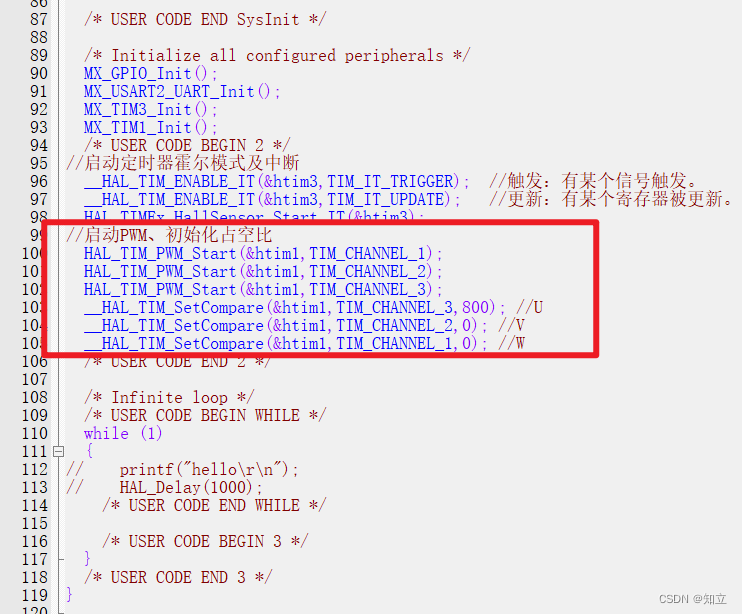
- 测试PWM是否正常输出,加入PWM启动代码和初始化占空比。
用万用表电压档,去测对应引脚电压是否符合占空比值。 - 在main里加入下面代码:
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_3);
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_3,800);
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_2,0);
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_1,0);
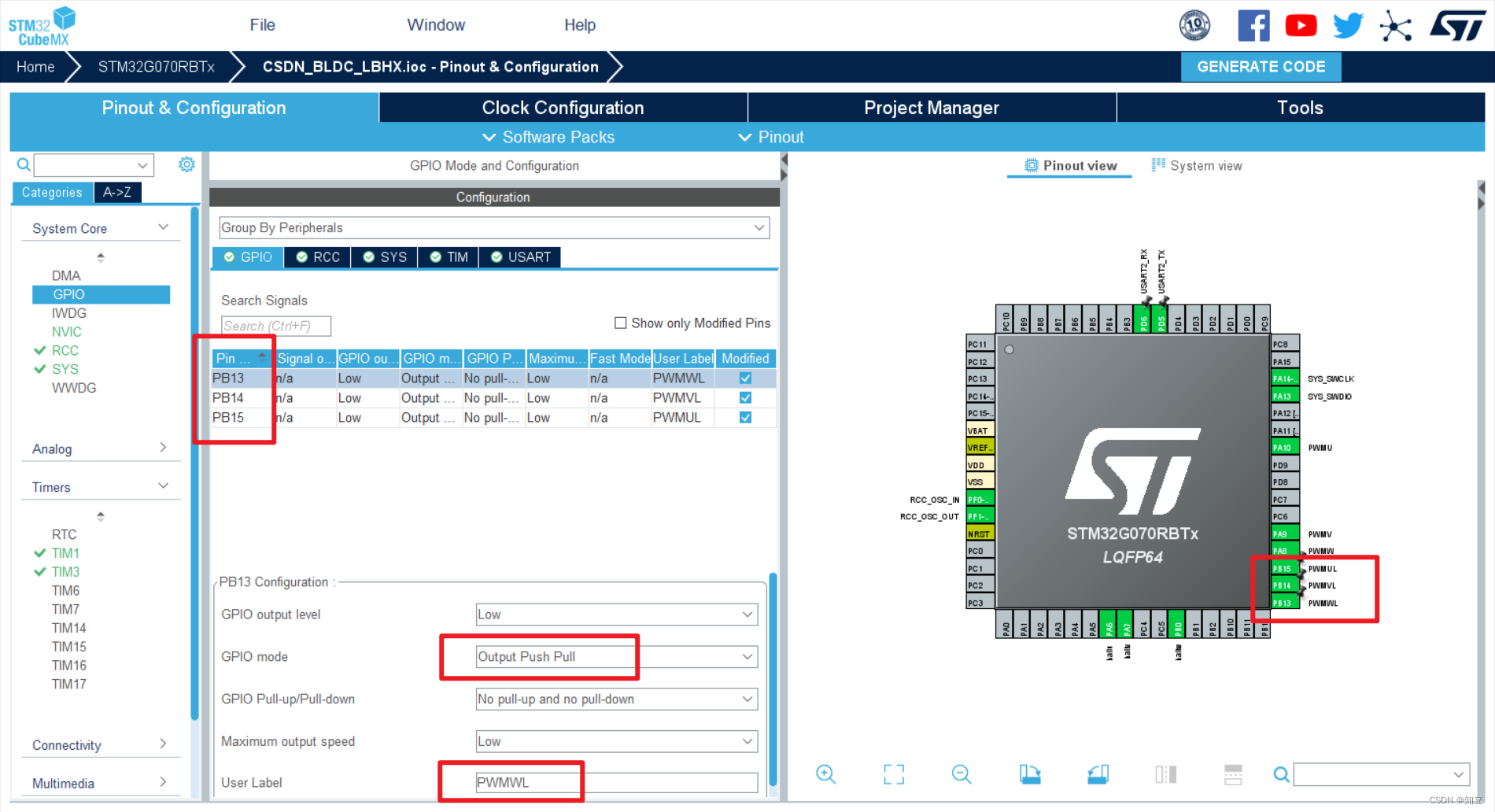
(2)普通GPIO配置
- cubemx
- 测试,在main中加入下代码
- 用电压档,测对应引脚是否正常输出电压。
HAL_GPIO_WritePin(PWMUL_GPIO_Port,PWMUL_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(PWMVL_GPIO_Port,PWMVL_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(PWMWL_GPIO_Port,PWMWL_Pin,GPIO_PIN_RESET);
(3)开环控制
- 我的电机是2对极,60度霍尔,所以能用下面这个换相表。同类型电机可以用,不同的话就要网上找一下对应的换相表,然后改下对应代码。
- 在hall.c里加入换相代码
uint16_t state=0;
uint16_t pwm_pulse=0
void HAL_TIM_TriggerCallback(TIM_HandleTypeDef *htim)
{
state = get_hall_state();
switch(state)
{
case 1:
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_3,pwm_pulse);
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_2,0);
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_1,0);
HAL_GPIO_WritePin(PWMUL_GPIO_Port,PWMUL_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(PWMVL_GPIO_Port,PWMVL_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(PWMWL_GPIO_Port,PWMWL_Pin,GPIO_PIN_SET);
break;
case 2:
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_3,0);
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_2,pwm_pulse);
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_1,0);
HAL_GPIO_WritePin(PWMUL_GPIO_Port,PWMUL_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(PWMVL_GPIO_Port,PWMVL_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(PWMWL_GPIO_Port,PWMWL_Pin,GPIO_PIN_RESET);
break;
case 3:
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_3,0);
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_2,pwm_pulse);
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_1,0);
HAL_GPIO_WritePin(PWMUL_GPIO_Port,PWMUL_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(PWMVL_GPIO_Port,PWMVL_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(PWMWL_GPIO_Port,PWMWL_Pin,GPIO_PIN_SET);
break;
case 4:
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_3,0);
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_2,0);
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_1,pwm_pulse);
HAL_GPIO_WritePin(PWMUL_GPIO_Port,PWMUL_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(PWMVL_GPIO_Port,PWMVL_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(PWMWL_GPIO_Port,PWMWL_Pin,GPIO_PIN_RESET);
break;
case 5:
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_3,pwm_pulse);
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_2,0);
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_1,0);
HAL_GPIO_WritePin(PWMUL_GPIO_Port,PWMUL_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(PWMVL_GPIO_Port,PWMVL_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(PWMWL_GPIO_Port,PWMWL_Pin,GPIO_PIN_RESET);
break;
case 6:
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_3,0);
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_2,0);
__HAL_TIM_SetCompare(&htim1,TIM_CHANNEL_1,pwm_pulse);
HAL_GPIO_WritePin(PWMUL_GPIO_Port,PWMUL_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(PWMVL_GPIO_Port,PWMVL_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(PWMWL_GPIO_Port,PWMWL_Pin,GPIO_PIN_RESET);
break;
}
}
- 更改pwm_pulse占空比值。然后就可以上电测试。!注意,上电前,一定确保你的这个换相逻辑和你的板子是对应起来的,别一上电上下桥同时导通,烧毁一切。
二、FOC
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)