作者:Blue Hole
个人网站:https://www.wcfde.xyz/,欢迎交流。
近几年边缘计算快速发展,已经渗透到各个行业。边缘计算单元也像雨后春笋涌现出来,面对如此多的开发板,我们该如何去选择一款适合学习的开发板呢?
在本篇文章中,我将结合我自身的学习经历和工作经历,给大家分享一些AI嵌入式开发板相关的知识,以帮助大家选择。由于本人水平有限,如有错误,望请大家提出。
首先我们来了解一下什么是边缘AI?边缘AI是指在硬件设备上本地处理的AI算法,可以在没有网络连接的情况下处理数据。这意味着可以在无需进行流式传输或在云端数据存储的情况下进行数据创建,处理等操作。为了实现这些目标,边缘计算可以在云上靠深度学习生成模型,而在数据原点——即设备本身(边缘)执行模型的推理和预测。目前,国际上尚未建立边缘人工智能的标准架构和统一算法,但各大厂商已经开始在相关领域进行探索。比如英伟达已经发布了一系列的边缘计算设备
这些设备包含了机器人,自动驾驶,AioT,无人机等领域。
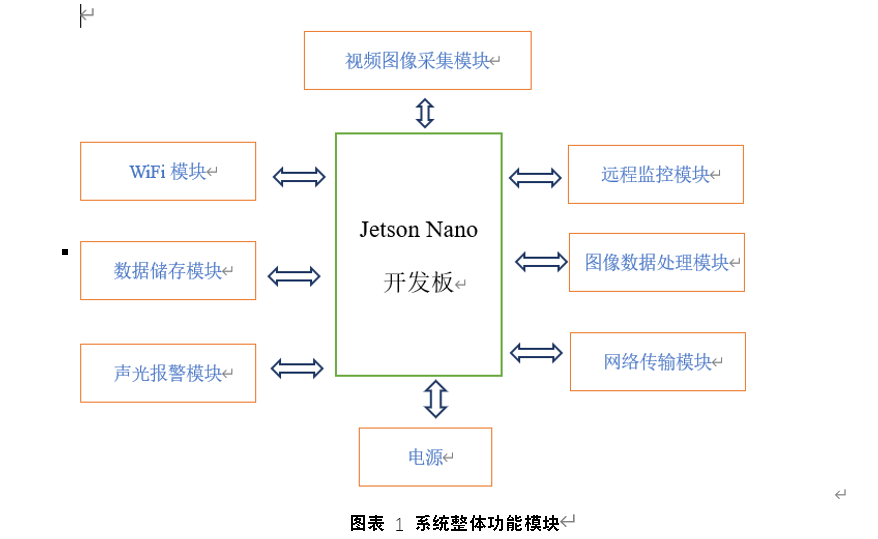
下图是之前我在工作中做的一个项目架构图,Jetson Nano作为边缘计算核心,数据在本地处理,提高了时效性,降低了服务中心的负载。
接下来,我就给大家介绍一下常用的这些开发板
1.树莓派(Raspberry Pi)

首先是树莓派,树莓派也是第一次接触的Arm开发板,大学的时候用来做智能小车,那时候直接用的4B 4G,他的尺寸仅有银行卡大小,树莓派最初的设计目标是用较为廉价的硬件和开源软件为儿童提供一个计算机编程教育平台。但其优秀的扩展性和易于开发的特性,大大的跳出了儿童教育,
成为了极客们的玩具。极客们用树莓派被开发出了千千万万种玩法,并且普通人也可以轻松实现这些玩法。之后会慢慢的给大家分享树莓派的各种玩法,比如大搭建个人私用云盘,个人网站,智能家居控制中心等。

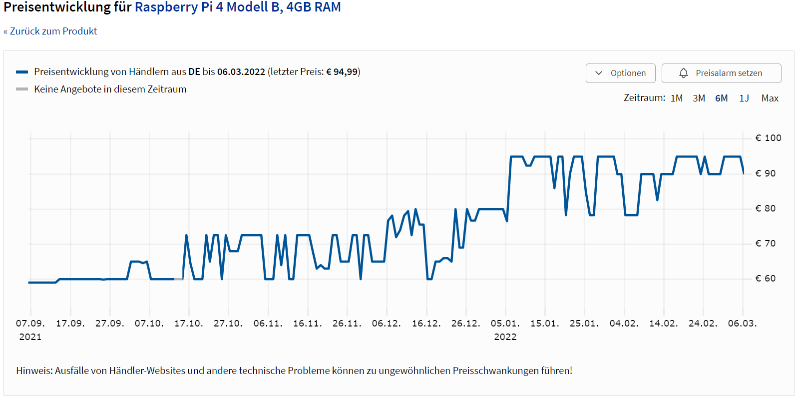
说到树莓派,现在有很多型号,目前已经发展到4B 8G了,也就是意味着市面上大多数的Linux发行版都可以安装。作为一个能运行标准Linux发行版的开发板来说,树莓派之前是非常便宜的,但是大环境的芯片慌,也造成了现在的价格上涨,从去年4月份以来,价格足足翻了一倍,已经成为‘理财项目’。
树莓派价格趋势图:
面对这么多的型号,我们该如何选择呢?
我们抛开价格谈性能,毕竟之前的价格是非常便宜的,我主要对比一下4B和3B+。

我们主要看到,树莓派4B性能与树莓派3B+相比无论是处理器速度,还是多媒体和内存上都有一个显著提升。据我测试,树莓派4B性能与ntel赛扬处理器 x86 PC系统的性能,体验感都差不多。树莓派4B具备1.5Ghz运行的64位四核处理器,最高支持以60fps的4K分辨率的双显示屏,支持高达8GB内存(可根据型号选择1GB、2GB、4GB、8GB),2.4/5.0 Ghz 双频无线LAN,蓝牙5.0/BLE,千兆以太网,USB3.0,和千兆网络功能。还支持40针的GPIO接口,这就使开发板能够添加更多的传感器,连接器,扩展版或者其他一下采用串口通信的智能设备。
除了上面说的支持Linux系统外,树莓派基金会和微软也达成合作,可以让树莓派适用win10系统。
树莓派4B的轻量化和高性能化,大多数轻量型的模型都可以跑,推理效果也是非常不错的。在一些机器人,自动化设备,可以完美的运行一些,,语音识别,人脸检测和一些定点追踪等任务。
在未来的一些创客项目还是工业项目,树莓派的地位会越来越重要的,只不过现在的价格有点高,买的同学可以等等。
2.Intel NCS2
介绍完树莓派,我们接着来说说Intel NCS2。上面提到树莓派只可以跑一些轻量型的神经网络,
那么,如果我们要跑一些中型或者大型网络该怎么办? 这就不得不提Intel NCS2(神经电脑棒 2)了,英特尔在2018年正式推出了身材依然只有U盘大小的第二代神经计算棒(Neural Compute Stick 2/NCS 2),可让开发者更智能、更高效地开发和部署深度神经网络应用,满足新一代智能设备的需求。

硬件配置(官网)
- 处理器:英特尔 Movidius Myriad X 视觉处理器 (VPU)
- 支持的深度学习框架:TensorFlow*、Caffe* 、Apache MXNet*、Open Neural Network Exchange (ONNX*),PyTorch 以及经过 ONNX 转换的 PaddlePaddle*
- 接口:USB 3.0 A 型
- 尺寸:72.5 毫米 x 27 毫米 x 14 毫米(2.85 英寸 x 1.06 英寸 x 0.55 英寸)
软件配置(官网)
- 英特尔发行版 OpenVINO 工具套件
- 支持的操作系统: Ubuntu 16.04.3 LTS(64 位) CentOS* 7.4(64 位) Windows 10(64 位) macOS 10.14.4(或更高) Raspbian(仅限目标)
- 其他(通过 OpenVINO™ 工具套件的开源分发)
Intel NCS 2 的性能比之前的 Movidius 计算棒(一代)有了极大的提升,其中图像分类性能高出约5倍,物体检测性能则高出约4倍。
那大家现在有疑问了,这玩意有啥用???
Intel NCS 2 的主要定位就是在应用于AioT。传统嵌入式设备受价格和体积影响,一般性能比较低(比如树莓派,智能跑一些轻量的神经网络),并不适合做深度学习中有关图像的运算。
深度学习的主力军 GPU ,因为体积较大,价格昂贵等因素,无法应用于AioT的边缘终端,而且在物联网的设备端只需要训练好的网络模型进行推理,不需要训练,因此在一定程度上来说,GPU用于推理会造成性能过剩。而Intel NCS2则解决了这个矛盾,它的主要定位就是用于AioT的边缘终端,
代替原有设备进行深度学习的推理,实现边缘计算。Intel NCS2的体积较小,价格低,专门用于图像计算,性能高于传统的嵌入式设备,起到了取长补短的功能。所以目前用树莓派做人工智能推理,大部分人都会配上一根Intel NCS 2 。
加之,Intel开发了一个专门用于部署推理的工具套件–OpenVINO工具,可以加速模型的推理部署。
我会在后面专门介绍这个工具。我们可以大概先看一些原理图:
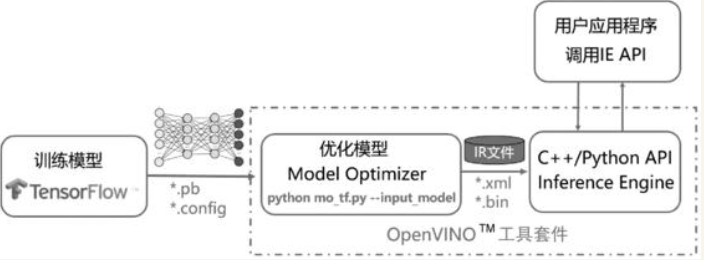
Intel推出的Intel NCS 2 可以作为物联网设备端AI应用的计算核心,搭配树莓派可以完成图像分类,车牌检测,目标检测等常用的深度学习模型的推理任务,实现边缘计算的功能。在应用某些较为复杂的模型时,可以使用多个Intel NCS 2 进行集群工作,或者将Intel NCS 2 作为核心推理设备的加速组件,加速模型的推理,实现更好的应用。
3.Jetson 系列
人工智能越来越普及,传感器收集的数据也越来越多,对计算能力的要求也越来越高。为了满足这一需求,选择GPU是不二选择,但是常规的GPU价格昂贵,体积庞大,功耗过高,这一些特点对于边缘计算是不符合的。为了满足这一些需求,NVIDIA创造了Jetson 系列,Jetson可以说是目前较为领先的边缘计算平台,适用于不同的常见。该平台包括 Jetson 模组(外形小巧的高性能计算机)、用于加速软件的 NVIDIA JetPack™ SDK,以及包含传感器、SDK、服务和产品的生态系统,从而加快开发速度。Jetson 与其他 NVIDIA 平台上所用的相同 AI 软件和云原生工作流相兼容,并能为开发者提供构建软件定义的自主机器所需的性能和能效。
每个 NVIDIA Jetson 都是一个完整的系统模组 (SOM),其中包括 GPU、CPU、内存、电源管理和高速接口等。不同性能、能效和外形规格的组合满足各类行业的开发者所需。我用的比较多的开发板就是Jetson 系列的,非常好用,速度也快,但是价格也是非常昂贵的。
他的产品系列也是非常多的,包含如下:
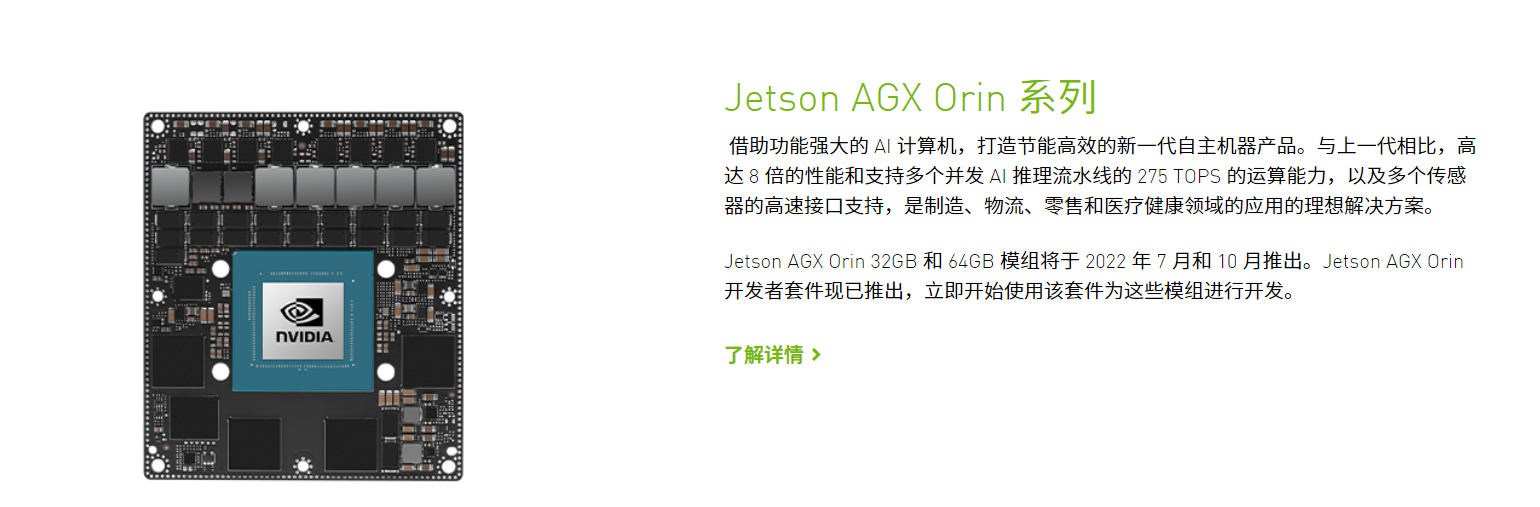

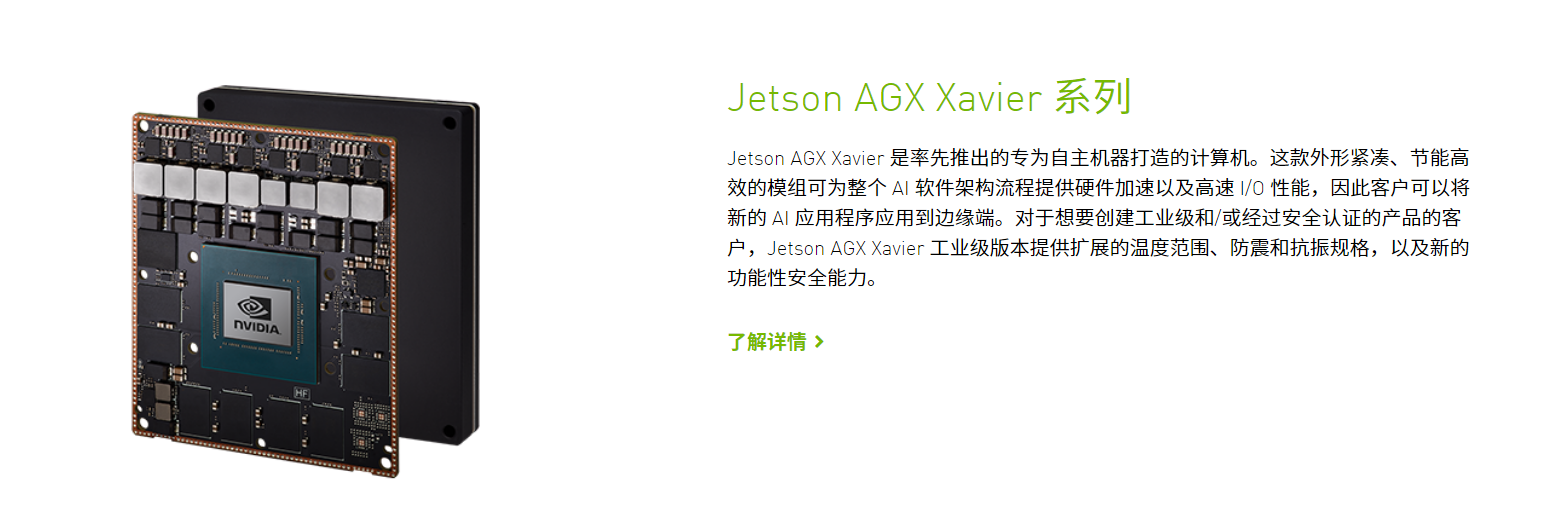
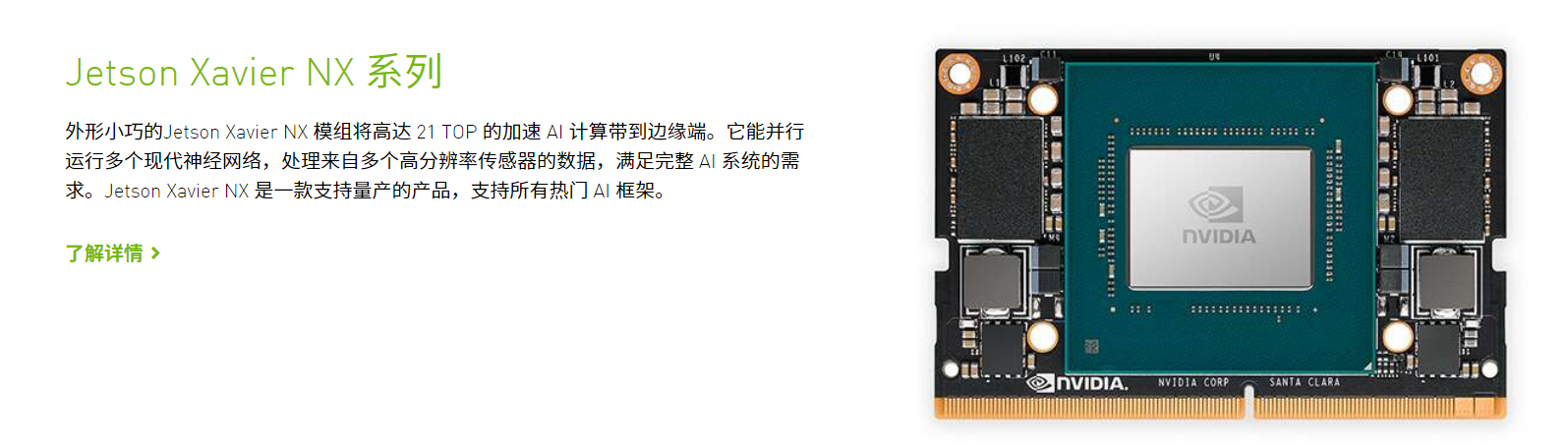

具体的大家可以去官网了解:https://www.nvidia.cn/autonomous-machines/embedded-systems/
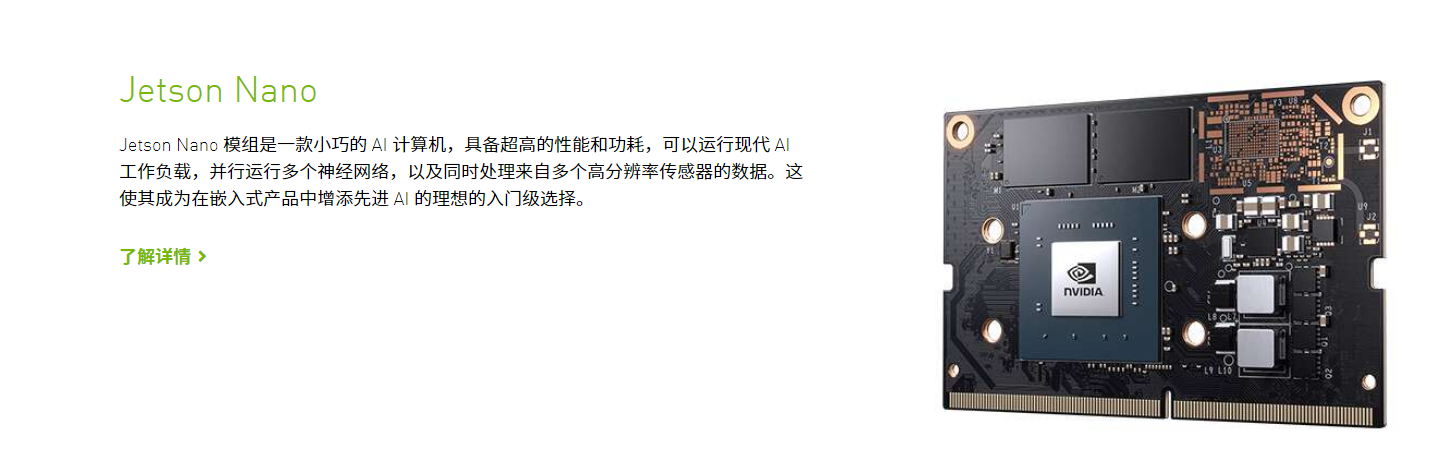
Jetson NANO
我给大家主要介绍Jetson NANO这块板,这块板是Jetson 系列中最便宜的(最近一年也是涨价了),个人学习或者一些中小型项目都可以完成。
后面的文章我也会基于Jetson NANO来写。
Jetson NANO开发者套件参数:

Nano最大的特色就是包含了一块128核Maxwell架构的GPU,虽然已经是几代前的架构,不过因为用于嵌入式设备,从功耗、体积、价格上也算一个非常好的平衡 。Nano的计算能力不高,勉强可以使用一些小规模、并且优化过的网络进行推理,训练的话还是不够用的。A57 1.43 GHz的CPU中规中矩,隔壁的树莓派4B已经升级为A72(但是Nano有GPU加持)。4GB的内存并不能完全使用,因为其中有一部分(1GB左右)是和显存共享的。Jetson Nano的最大优势还是在体积上,它采用核心板可拆卸设计,可以很方便的集成在各种嵌入式应用中,同时它的功耗也非常低。和树莓派一样
搭载了40针的GPIO口,可以丰富的扩展很多传感器。
Nano可以开发很多项目,树莓派能完成的它都能完成,ROS小车加上单点激光雷达,双目摄像头,IMU等传感器都可以很流畅的运行。
后期,我将会基于Nano带大家完成一些好玩的项目。
Nano的一些应用案例:

4.其他开发板
其他的开发板我没有用过,我分享一些我了解的。
- 昉·星光 VisionFive

昉·星光 VisionFive由国内领先的 RISC-V 芯片公司赛昉科技打造,在去年 12 月正式登场。作为全球首款可运行 Linux 的 RISC-V 开发板,星光板承载了 RISC-V 软件生态建设的使命,是各大社区进行 RISC-V 软件适配的“必备”,在国内的售价为1100 元,如果大家想另辟蹊径的话可以尝试一下,我们在交流。

这一款是采用X86架构,Linux发行版大多都能完美运行,可以配一根Intel NCS 2 也是可以完美流畅推理的。价格也比较便宜,在未来很有可能是树莓派的竞争对手,价格大概1500元。
感谢大家的观看,我对边缘计算平台的理解就是这些,如果有不足欢迎指正。
我的邮箱:wcfDeyx@163.com
个人网站:https://www.wcfde.xyz/
欢迎交流!
申明:部分图片来源于网络,若侵权,联系删除!
参考连接:
英伟达边缘计算官网:https://www.nvidia.cn/autonomous-machines/embedded-systems/
树莓派社区:https://shumeipai.nxez.com/intro-faq
知乎专栏:https://zhuanlan.zhihu.com/p/77585297
Linux中国:https://mp.weixin.qq.com/s/OSqbHmCX-XHE67jZIVwbJQ
ODROID C4官网:https://wiki.odroid.com/start
芯片坊:https://demo.ftxia.com/item.htm?id=670685349157
Intel官网:https://www.intel.cn
知乎专栏:https://zhuanlan.zhihu.com/p/62501901
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
