文章目录
- 1.FreeRTOS
- 1.1.文件
- 1.2.移植
- 1.3.FreeRTOS的编程风格
- 1.3.1.数据类型
- 1.3.2.变量名
- 1.3.3.函数名
- 1.4.裸机&多任务系统
- 1.5.数据结构
- 1.5.1.链表
- 1.5.2.双向链表
- 1.5.3.FreeRTOS的链表
- 2.任务
- 2.1.创建任务
- 临界段保护
- 空闲任务与阻塞延时
- 多优先级
- 延时列表
- 支持时间片
- 移植
- 创建任务
- 任务管理
- 消息队列
- 信号量
- 互斥量
- 事件
- 软件定时器
- 任务通知
- 内存管理
- 中断管理
- CPU使用率
1.FreeRTOS
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-4P4MfHnK-1657685391686)(https://www.freertos.org/a00104.html)]
ref: 野火 《FreeRTOS 内核实现与应用开发实战—基于STM32》
可在野火大学堂下载 或 下载链接
1.1.文件
FreeRTOS
- License: 许可信息
- Source: 源码
- include: 头文件
- portable: 软件到硬件驱动
- RVDS
- ARM_CM3: 移植所需
FreeRTOS-Plus: 增加的功能代码
1.2.移植
- 原工程添加
FreeRTOS文件夹 - 将
\FreeRTOSv202112.00\FreeRTOS\Source的文件拷贝进去 portable中删剩下Keil, MemMang, RVDS- 在MDK工程添加分组和文件
|--FreeRTOS_CORE
|--croutine.c
|--event_groups.c
|--list.c
|--queue.c
|--tasks.c
|--timers.c
|--FreeRTOS_PORTABLE
|--port.c
|--heap_4.c
- 添加头文件路径
\FreeRTOS\include和\FreeRTOS\portable\RVDS\ARM_CM3 - 从官方历程
\FreeRTOSv202112.00\FreeRTOS\Demo\CORTEX_STM32F103_Keil中找到文件FreeRTOSConfig.h,拷贝到工程目录的\FreeRTOS\include中 - 编译
1.3.FreeRTOS的编程风格
1.3.1.数据类型
见portmacro.h
- portCHAR: char
- portSHORT: short
- portTickType: 定义系统时基计数器值&阻塞时间
- unsigned short int:
FreeRTOSConfig.h: configUSE_16_BIT_TICKS=1 为16位 - unsigned int:
FreeRTOSConfig.h: configUSE_16_BIT_TICKS=01 为32位
- portBASE_TYPE: long 定义函数返回值/布尔类型: 32/16/8bit处理器–32/16/8bit数据类型
1.3.2.变量名
前缀:类型
- c: char型
- s: short型
- l: long型
- x: portBASE_TYPE型, 数据结构, 任务句柄, 队列句柄
- u: 无符号型 uc: 无符号char
- p: 指针变量 pc: char指针
1.3.3.函数名
前缀:哪个头文件定义
- port: portable.h
- task: task.h
- pd: projdefs.h
- config: FreeRTOSConfig.h
- err: projdefs.h
通用宏定义 - pdTRUE: 1
- pdFALSE: 0
- pdPASS: 1
- pdFAIL: 0
1.4.裸机&多任务系统

1.5.数据结构
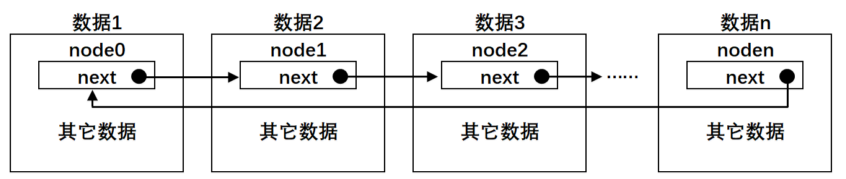
1.5.1.链表
通过节点将离散的数据链接到一起,组成一个表,常规操作:插入&删除, 通常人为规定一个根节点(生产者),还有个节点计数器.

含有n个节点,前一节点有一个箭头指向后一节点,首尾相连. 节点是自定义类型的数据结构,本身含一个结点指针, 指向后一节点, 还携带一些私有信息(单个数据,数组,指针,结构体等).

通常在节点中只包含一个用于指向下一个节点的指针,通过链表存储的数据内嵌一个节点
1.5.2.双向链表
两个节点指针,分别指向前后两个节点

链表&数组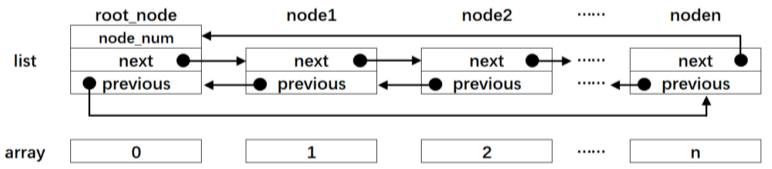
- 数组:开辟一段连续内存来存储数据,有起始结束地址
- 链表:一个圈,通常人为规定一个根节点,对节点插入/删除来实现存取数据
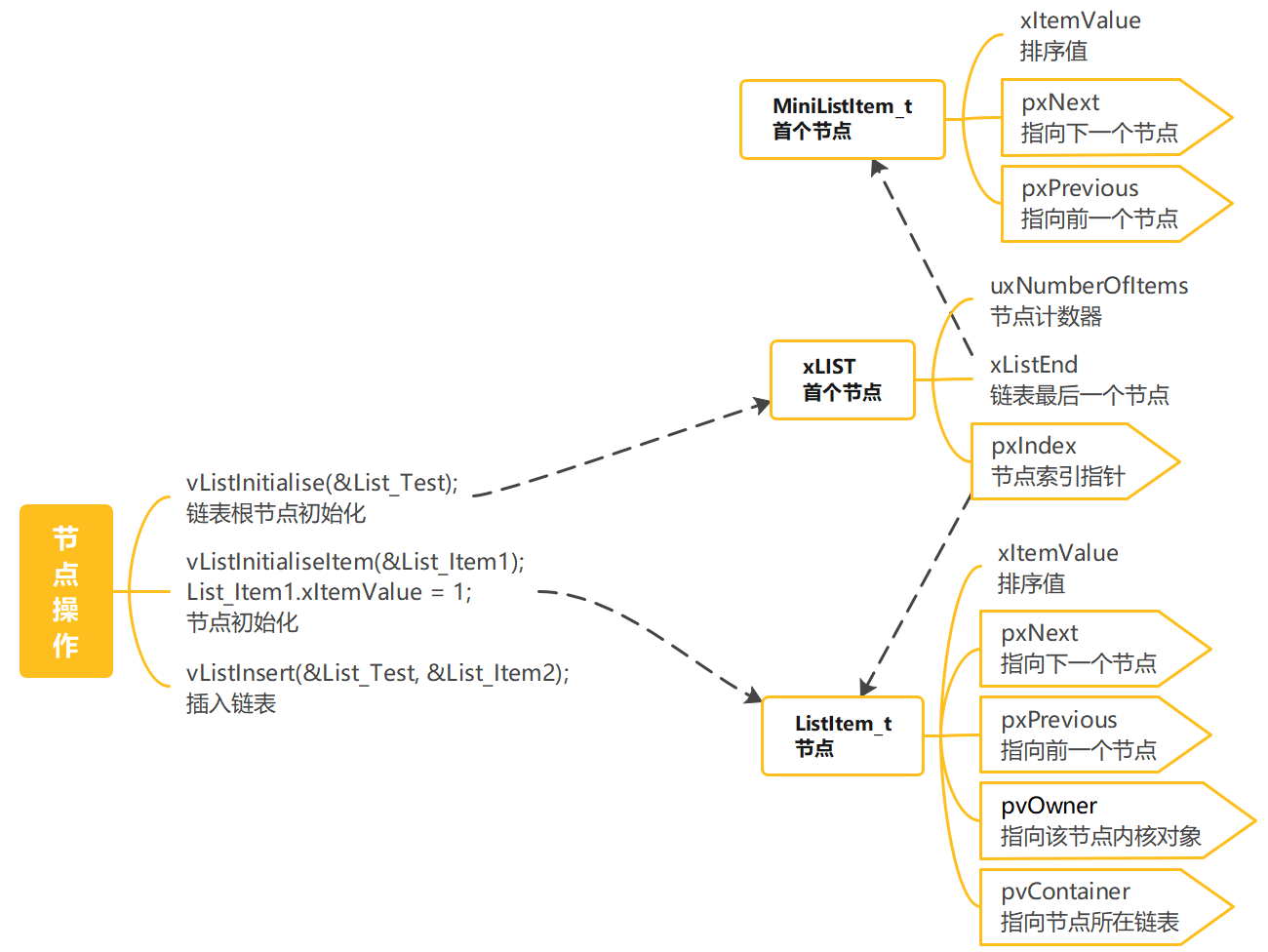
1.5.3.FreeRTOS的链表
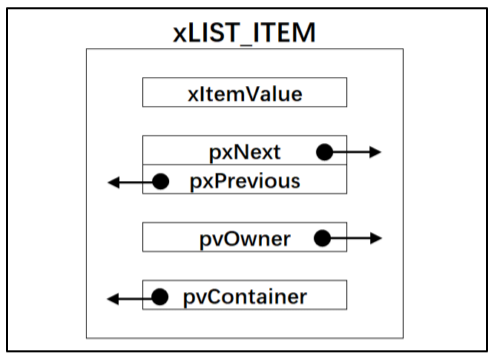
链表节点数据结构定义
struct xLIST_ITEM
{
TickType_t xItemValue; // 辅助值:帮节点做顺序排列
struct xLIST_ITEM * pxNext; // 指向链表下一个节点
struct xLIST_ITEM * pxPrevious; // 指向链表前一个节点
void * pvOwner; // 指向拥有该节点的内核对象(TCB)
void * pvContainer; // 指向该节点所在链表
};
typedef struct xLIST_ITEM ListItem_t; // 节点数据类型重定义
2.任务
2.1.创建任务
- 任务栈: 多任务系统中,每个任务分配独立的栈空间(RAM中预定义的全局数组/动态分配的一段内存空间)
- 任务控制块: 存有任务栈指针,名称,形参等所有信息
- 任务创建函数: 任务栈,函数实体,控制块联系起来
- 动态创建: 任务控制块,栈的内存是创建任务时动态分配,删除时内存释放
- 静态创建: 控制块,栈的内存事先定义好,为静态内存,删除时不释放
TaskHandle_t Task1_Handle; // 任务句柄
#define TASK1_STACK_SIZE 128 // 任务栈大小
StackType_t Task1Stack[TASK1_STACK_SIZE]; // 任务栈
TCB_t Task1TCB; // 任务控制块
Task1_Handle = xTaskCreateStatic( (TaskFunction_t)Task1_Entry, /* 任务入口 */
(char *)"Task1", /* 任务名称,字符串形式 */
(uint32_t)TASK1_STACK_SIZE , /* 任务栈大小,单位为字 */
(void *) NULL, /* 任务形参 */
(UBaseType_t) 2, /* 任务优先级,数值越大,优先级越高 */
(StackType_t *)Task1Stack, /* 任务栈起始地址 */
(TCB_t *)&Task1TCB );
临界段保护
- 临界段: 执行时不能被中断的代码段 (操作全局变量)
空闲任务与阻塞延时
- RTOS的延时: 阻塞延时
- 空闲任务: 启动调度器时创建的优先级最低的任务
- 阻塞延时: 调用时任务被剥离cpu使用权, 进入阻塞状态, 可去执行其他任务(若也阻塞, 运行空闲任务)
FreeRTOSConfig.h决定SysTick的中断周期
#define configCPU_CLOCK_HZ ( ( unsigned long ) 25000000 )
#define configTICK_RATE_HZ ( ( TickType_t ) 1000 )
vTaskDelay( 1 );
多优先级
- 就绪列表
pxReadyTasksLists[configMAX_PRIORITIES]数组存储就绪任务的TCB(的xStateListItem节点), 数组下标越小, 任务优先级越低 - 创建任务时根据任务优先级将任务插入到就绪列表不同位置, 同优先级插入同一条链表
pxCurrenTCB: 全局TCB指针, 任务切换时指向优先级最高的就绪任务TCBtaskSELECT_HIGHEST_PRIORITY_TASK
taskSELECT_HIGHEST_PRIORITY_TASK() // 寻找优先级最高的就绪任务 (更新`uxTopReadyPriority`和`pxCurrentTCB`的值)
taskRESET_READY_PRIORITY( uxPriority ) // 将变量uxTopReadyPriority某个位清0
// 实现任务延时列表后, 任务非就绪时, 清零uxTopReadyPriority对应位, 将任务从就绪列表删除
延时列表
- 任务需要延时时,将任务挂起, 从就绪列表删除, 插入延时列表, 更新下一个任务解锁时刻变量
xNextTaskUnblockTime xNextTaskUnblockTime = 时基计数器值xTickCount + 任务延时xTickToDelay
- 每次时基中断来,
比较xTickCount xNextTaskUnblockTime
支持时间片
- 同一优先级下多个任务, 每个任务轮流享有相同CPU时间
移植
- 配置
FreeRTOSConfig.h#include "stm32f10x.h" //
#include "bsp_usart.h" // 断言操作需要打印
#define xPortPendSVHandler PendSV_Handler // 中断服务函数配置相关
#define vPortSVCHandler SVC_Handler
- 配置
stm32f10x_it.c//systick 中断服务函数
void SysTick_Handler(void)
{
#if (INCLUDE_xTaskGetSchedulerState == 1 )
if (xTaskGetSchedulerState() != taskSCHEDULER_NOT_STARTED) {
#endif /* INCLUDE_xTaskGetSchedulerState */
xPortSysTickHandler();
#if (INCLUDE_xTaskGetSchedulerState == 1 )
}
#endif /* INCLUDE_xTaskGetSchedulerState */
}
创建任务
- 板级初始化
- 定义任务函数
- 实现空闲任务, 定时器任务堆栈函数
- 定义任务栈
- 定义任务控制块
- 创建静态任务
- 启动任务
任务管理
- 任务: 竞争系统资源的最小运行单元
- FreeRTOS的任务可认为是一系列独立任务集合, 每个任务在自己环境中运行, 同一时刻一个任务运行(调度器决定启动停止, 切入切出保存上下文环境), 宏观上每个任务都在执行, 系统可用SRAM决定能运行多少任务
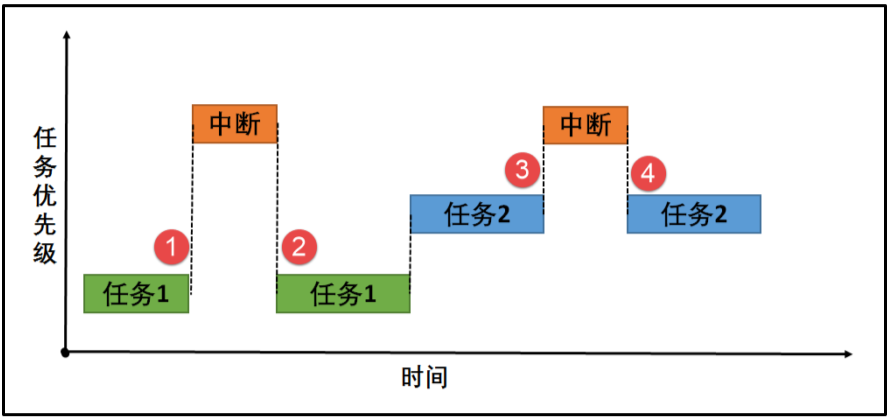
- 抢占式调度机制: 高优先级任务可打断低优先级任务, 低优先级任务必须在高优先级任务阻塞/结束才能得到调度
- 任务调度器: 基于优先级的全抢占式调度
- 中断处理函数, 调度器上锁部分, 禁止中断 不可抢占, 其他部分可抢占
- 同优先级采用时间片轮转方式调度, 最大可能保证高优先级任务得以运行
- 任务状态迁移
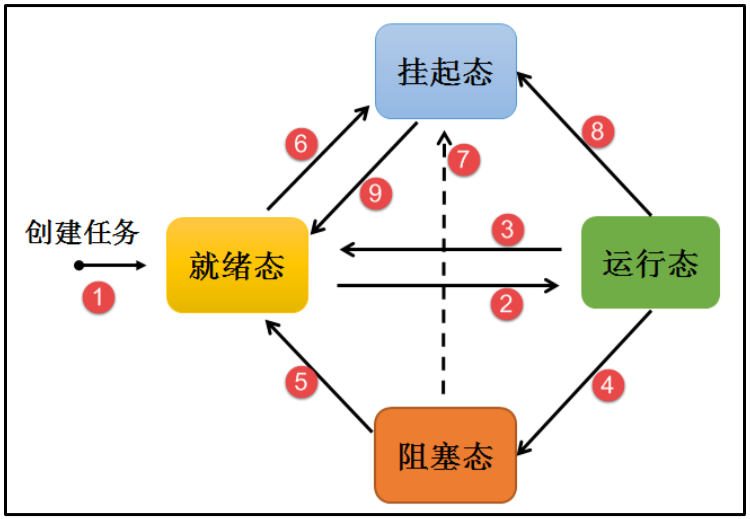
- 就绪态: 任务准备就绪, 等调度器进行调度, 有更高优先级任务创建/恢复, 原运行任务->就绪态
- 运行态: 任务切换时, 就绪列表的最高优先级任务被执行, 选择运行的永远是最高优先级的就绪态任务
- 阻塞态: 运行任务发生阻塞(被挂起,延时,等待信号量), 任务退出就绪列表, 切换任务
- 挂起态: 通过
vTaskSuspend()将处于任何状态的任务挂起, 挂起后无cpu使用权, 不参与调度, 用vTaskResume()解除
vTaskSuspend()任务挂起函数vTaskResume()任务恢复函数xTaskResumeFromISR()恢复被挂起的任务(中断)vTaskSuspendAll()挂起调度器, 相当于挂起所有任务xTaskResumeAll()恢复调度器, 用多少次挂起要用多少次恢复
- 函数
vTaskDelete()任务删除函数vTaskDelay()相对任务延时函数, 不适用于周期性执行任务的场合vTaskDelayUntil()绝对延时函数, 实现固定频率定期执行任务
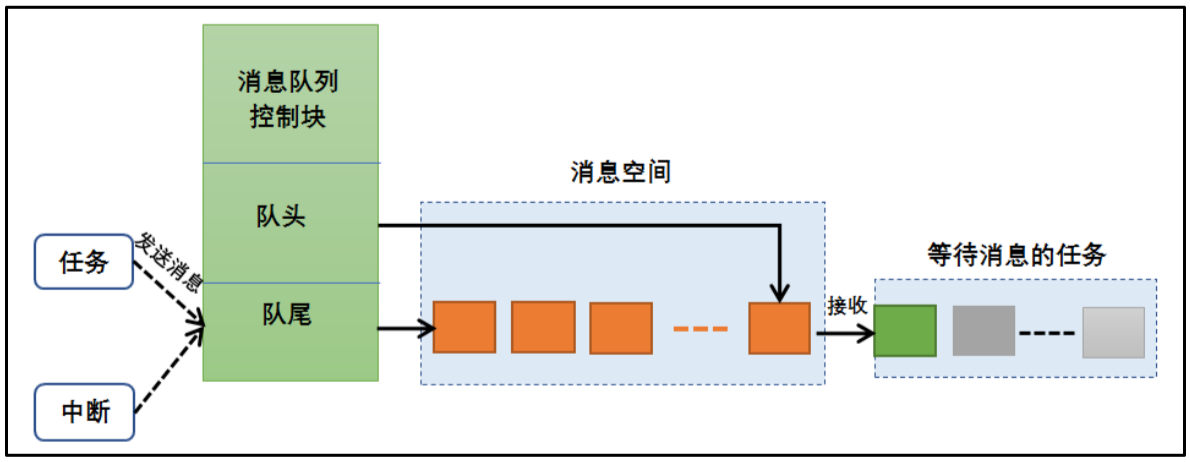
消息队列
- 消息队列: 常用于任务间通信的数据结构
- 可在任务与任务间中断和任务间传递信息, 实现任务接受来自其他任务/中断的不定长消息
- 任务可从队列读取消息, 空消息时该任务阻塞
- 阻塞任务时间
xTicksToWait, 若队列空, 任务保持阻塞态以等待队列数据有效 - 有新消息: 唤醒处理消息
- 超过阻塞时间: 任务就绪
- 先进先出FIFO
- 特性
- 消息支持先进先出排队, 异步读写工作方式
- 读写队列支持超时机制
- 支持后进先出排队LIFO
- 允许不同长度任意类型消息
- 一任务从任意队列接受发送消息
- 多任务从同一队列接受发送消息
- 队列使用结束可删除
- 运作机制
- 创建队列: 分配内存空间 = 单个空间大小 x 消息队列长度
- 头指针pcHead, 尾指针pcTail, 消息大小uxItemSize, 队列长度uxLength
- 初始化: 队列为空
- 发送消息
- 队列未满/允许覆盖: 拷贝到队列队尾
- 否: 阻塞
- 其他任务读入数据/超过阻塞时间 ->就绪态
- 紧急消息
- 阻塞机制
- 无消息: 不等, 等一段时间, 持续等
- 队列满: 入队任务阻塞
- 多任务阻塞一个队列: 优先级高获得访问权
- 函数
xQueueCreate()创建消息队列 分配RAM:队列状态+存储区域vQueueDelete()消息队列删除函数- 发送
xQueueSend()向队列尾部发送一个队列消息(不能被中断调用)xQueueSendFromISR()中断向队列尾部发消息xQueueSendToFront()向队列队首发一个消息xQueueSendToFrontFromISR()中断向队列队首发一个消息xQueueGenericSend()通用消息队列发送函数xQueueGenericSendFromISR()中断通用消息队列发送
- 接收
xQueueReceive()接收消息, 将消息从队列删除xQueueReceiveFromISR()中断接收消息, 将消息从队列删除, 无阻塞xQueuePeed()接收消息, 不删除消息xQueuePeedFromISR()中断接收消息, 不删除消息, 无阻塞xQueueGenericReceive()通用任务从队列读取消息
- 注意
- 先创建消息队列, 后使用读写函数
- 先进先出FIFO / 后进先出LIFO
- 定义存储读取数据处 > 消息大小
- 收发以拷贝进行, 大消息可用地址
信号量
- 信号量
- 实现任务间通信的机制, 同步/临界资源的互斥访问, 协助一组相互竞争的任务访问临界资源
- 非负整数, 获取它的任务将该数-1, ->0所有获取它的任务阻塞
- 0: 没有积累下来的释放信号量操作, 可能在信号量上阻塞的任务
- +: 1/多个释放信号量操作
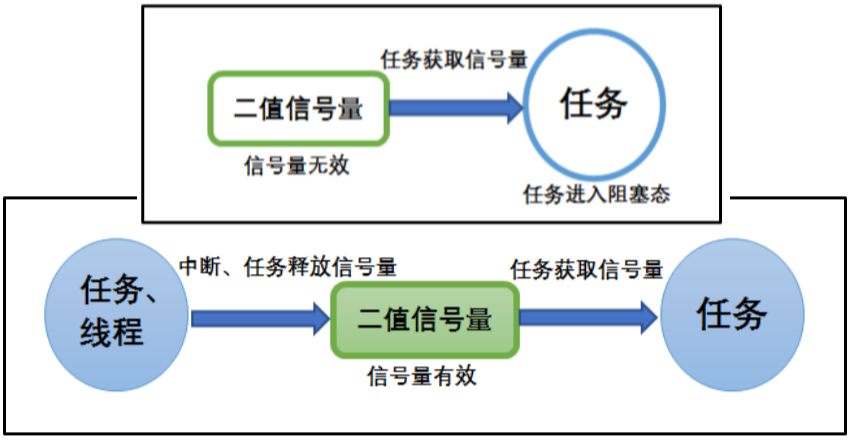
- 二值信号量
- 临界资源访问/同步
- 与互斥信号量类似但无优先级继承机制(二值量偏向同步, 互斥量偏向临界资源访问)
- 同步
- 信号量创建后置空, 任务1获取信号量->阻塞, 任务2在某条件发生, 释放信号量, 任务1->就绪, 若优先级高即切换: 实现同步 (中断同理)
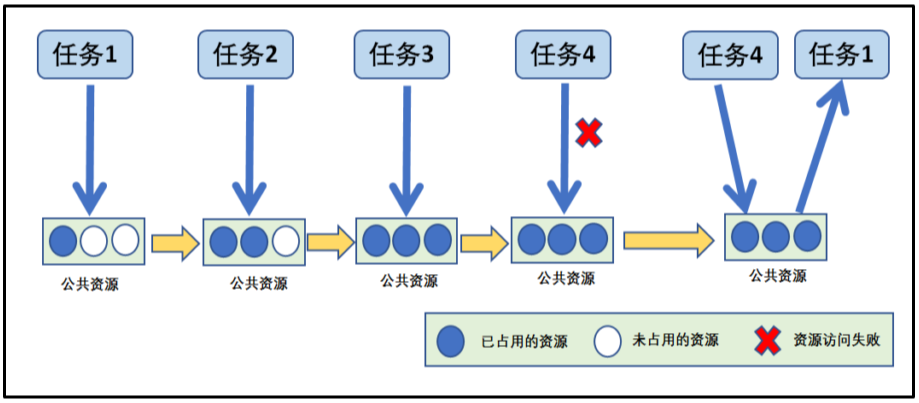
- 计数信号量
- 长度>1的队列, 事件计数&资源管理
- 事件发生, 任务/中断释放一个信号量(+1), 事件被处理, 取走信号量(-1)
- 计数值表示系统中可用资源数
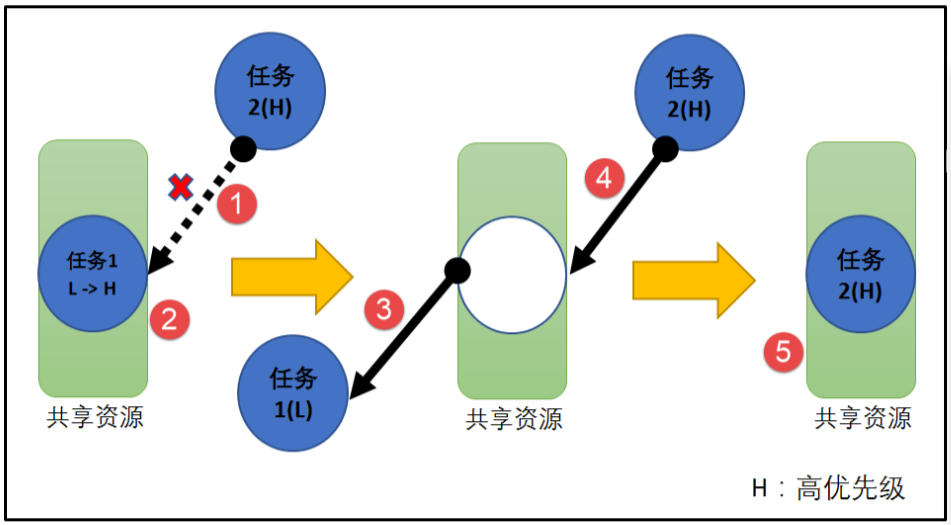
- 互斥信号量
- 特殊的二值信号量, 优先级继承机制, 保护临界资源, 创建后满
- 使用临界资源(任意时刻只能被一个任务访问)时, 先获取互斥信号量, 使之空, 其他需要使用资源的任务进入阻塞
- 递归信号量
- 已获取递归互斥量的任务可重复获取该递归互斥量, 该任务有递归信号量所有权, 获取几次要返还几次, 此前递归互斥量无效, 其他任务无法获取
- 信号量控制块
semphr.h 结构体与消息队列结构体一致uxMessagesWaiting有效信号量个数
- 二值/互斥信号量 1:有可用信号量 0:无
- 计数信号量: 可用信号量数
uxLength队列长度
- 函数
xSemaphoreCreateBinary()创建二值信号量(空), 要先释放才能获取xSemaphoreCreateCounting()创建计数信号量vSemaphoreDelete()删除一个信号量xSemaphoreTake()任务获取信号量xSemaphoreTakeFromISR()任务获取信号量xSemaphoreGive()任务释放信号量xSemaphoreGiveFromISR()中断释放信号量
互斥量
- 互斥信号量, 特殊二值信号量, 支持互斥量所有权, 递归访问及防止优先级翻转的特性, 实现对临界资源独占式处理
- 状态: 开锁 / 闭锁
- 一任务持有互斥量, 其他任务不能再对互斥量开锁 / 持有, 持有互斥量的任务可再次获得该锁不被挂起(递归访问)
- 优先级继承机制
- 某资源受互斥量保护, 被1低优先级任务使用, 高优先级申请不到进入阻塞态, 则持有互斥量任务的优先级临时±>高优先级任务
- 运作机制
- 函数
xSemaphoreCreateMutex()创建互斥量prvInitialiseMutex()初始化互斥量xSemaphoreCreateRecursiveMutex()创建递归互斥量vSemaphoreDelete()删除互斥量xSemaphoreTake()获取互斥量xSemaphoreTakeRecursive()获取递归互斥量, 需先创建xSemaphoreGive()释放互斥量xSemaphoreGiveRecursive()释放递归互斥量
事件
- 一种实现任务间通信的机制, 主用于实现多任务间同步, 不传输数据
- 只能实现事件类型通信, 无数据传输, 可实现一对多, 多对多同步, 一个任务可等待多个事件发生 / 任一时间发生时唤醒任务处理事件 / 几个事件发生后才唤醒任务处理事件
- 存储于
EventBits_t类型变量(少量RAM保存事件组状态) - 任务通过逻辑 与 / 或 与多个事件建立关联 -> 事件组
- 与: 关联型同步, 任务感兴趣的若干事件都发生才唤醒
- 或: 独立型同步, 任务感兴趣的任一时间发生即唤醒

- 特点
- 事件相互独立, 只与任务关联, 32位时间集合
EventBits_t24位表示事件: 0:未发生 1:已发生 共24种事件类型 - 仅用于同步, 不传输数据
- 无排队性, 多次向任务设置同一事件(未响应) = 设置一次
- 允许多任务对同一事件读写
- 支持事件等待超时机制
- 函数
xEventGroupCreate()创建事件vEventGroupDelete()删除事件xEventGroupSetBits()置位事件组, 阻塞于该位的任务被解锁xEventGroupSetBitsFromISR()中断置位事件组, 阻塞于该位的任务被解锁xEventGroupWaitBits()阻塞等待事件, 获取事件是否已经发生xEventGroupClearBits()清除事件组指定的位xEventGroupClearBitsFromISR()中断清除事件组指定的位
软件定时器
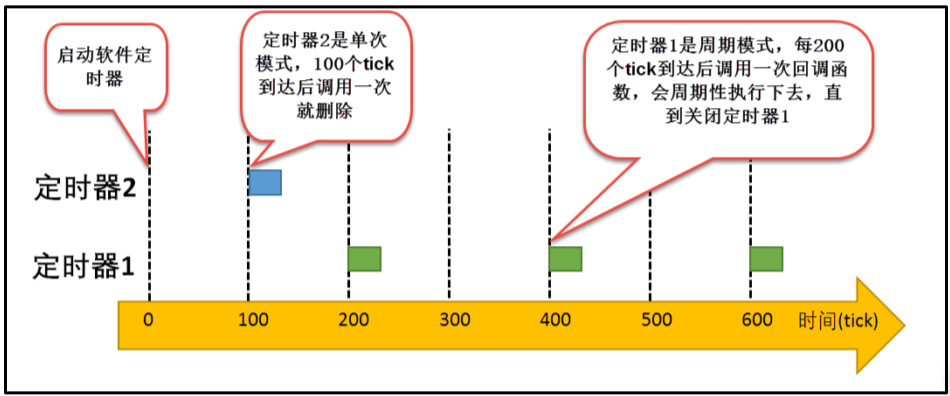
- 经过设定的时钟计数值后触发用户定义的回调函数, 适于对时间精度要求不高的任务
- 节拍周期的整数倍
- 单次模式: 创建启动定时器后, 定时时间到, 只执行一次进入休眠,
- 周期模式: 列表中删除, 下一次定时到时升序插入
- 按设置定时时间循环执行回调函数直至删除
- 函数
xTimerCreate()创建软件定时器xTimerStart()启动软件定时器xTimerStartFromISR()中断启动软件定时器xTimerStop()停止一个已启动的软件定时器xTimerStopFromISR()中断停止一个已启动的软件定时器xTimerDelete()删除软件定时器函数
任务通知
- 每个任务有一个32位的通知值, 可替代二值信号量, 计数信号量, 事件组, 长度1队列
- 发送通知给任务, 若有通知未读, 不覆盖通知值
- 发送通知给任务, 覆盖通知值
- 发送通知给任务, 设置通知值一个/多个位, 作为事件组
- 发送通知给任务, 递增通知值, 作为计数信号量
- 只能有一个任务接收通知消息, 须指定接收通知的任务
- 只有等待通知的任务可阻塞, 发通知的任务不阻塞
- 函数
xTaskGenericNotify()发送任务通知函数vTaskNotifyGiveFromISR()中断发送任务通知函数xTaskNotify()直接向另一个任务发送一个事件xTaskNotifyFromISR()中断直接向另一个任务发送一个事件ulTaskNotifyTake()获取任务通知, 配合Give()xTaskNotifyWait()等待通知
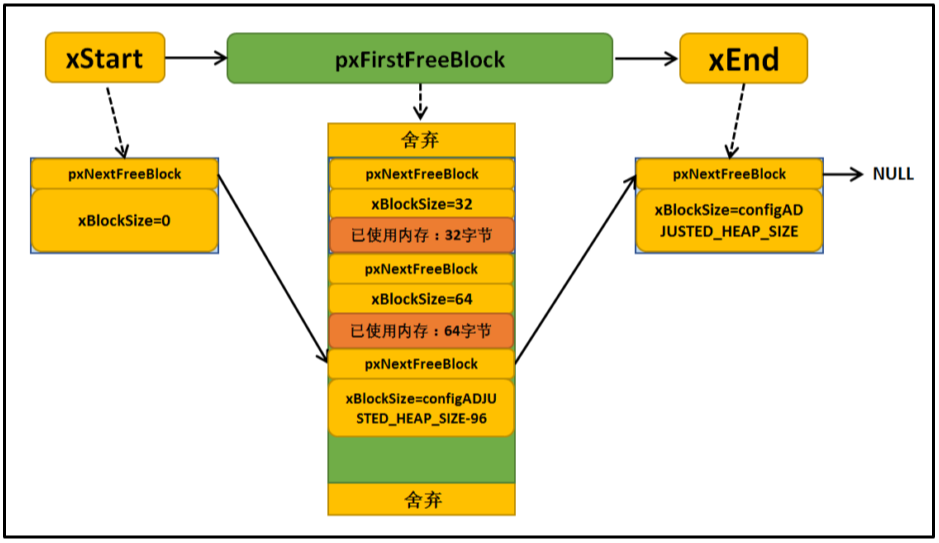
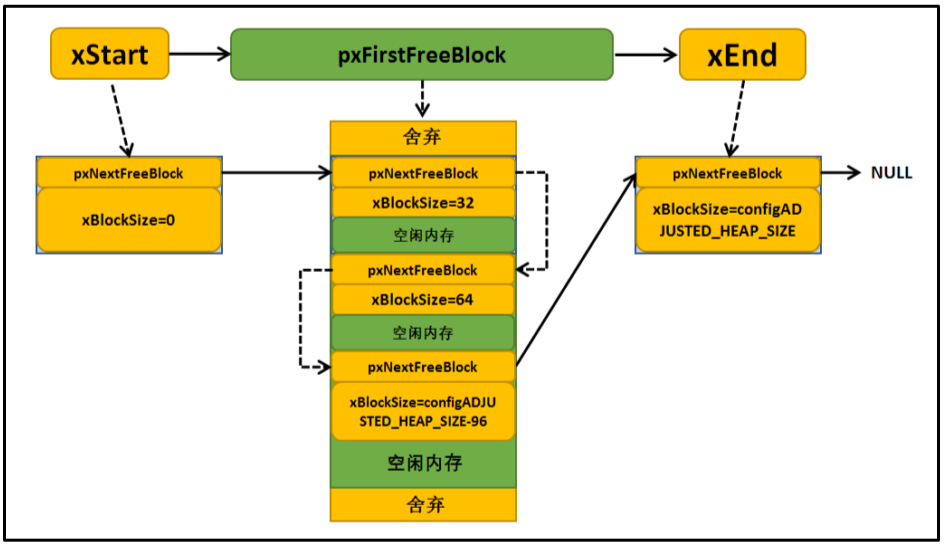
内存管理
- 用于系统中内存资源, 初始化, 分配, 释放
heap_1.cheap_2.cheap_4.c内存堆为一个大数组ucHeap[configTOTAL_HEAP_SIZE]heap_3.c封装了c标准库的malloc(), free(), 可安全地在嵌入式系统执行heap_5.c允许用户使用多个非连续内存堆空间, 每个堆起始地址,大小由用户定义
heap_1.c
- 只能申请内存不能释放, 申请时间为常量, 不会产生碎片导致崩溃, 不能回收, 内存利用率低
- 用于从不删除任务, 队列, 信号量, 互斥量等的程序
- 函数执行时间确定, 不产生内存碎片
pvPortMalloc()申请一块用户指定大小的内存空间, 系统管理的空间满足需求则成功
heap_2.c
- 最佳匹配算法, 优先分配申请量接近的内存块
- 支持释放申请内存, 不能把相邻小内存块合并为大内存块
- 适于反复删除任务, 队列, 信号量等内核对象, 不担心内存碎片的程序
- 不确定性, 效率>c库
malloc() - 不能用于内存分配, 释放随机大小的程序
pvPortMalloc()最佳匹配算法管理内存, 先从内存块空闲链表头开始遍历, 查找符合用户申请大小的内存块, 申请成功后判断当前内存是否剩余, 完善该内存块信息, 插入内存块空闲链表
vPortFree()传入要释放的内存地址, 自动索引到对应链表节点, 取出信息, 插入空闲内存块链表
heap_3.c
- 封装标准c库的
malloc()功能和free()函数, 有保护功能 - 需要链接器设置一个堆
- 不确定性
- 增大RTOS内核代码大小
heap_4.c
- 最佳匹配算法实现动态内存分配, 合并算法可将相邻空闲内存块合并为更大的块, 减少内存碎片
- 适于重复删除任务, 队列, 信号量, 互斥量等的应用
- 用于分配, 释放随即字节内存的应用, 不会有严重内存碎片
- 不确定性, 效率>标准c库
malloc()
heap_5.c
- 最佳匹配算法, 合并算法, 允许内存跨多个非连续内存区, 在不连续内存堆实现分配
vPortDefineHeapRegions()实现系统管理的内存初始化
中断管理
- 异常: 打断处理器正常执行, 迫使处理器进入一个由有特权的特殊指令执行的事件
- 同步异常: 内部事件(处理器指令运行产生的事件引起), 触发后须立刻处理, 不能执行原有程序指令步骤
- 异步异常: 外部硬件装置产生的事件引起的异常源, 触发后可以延缓/忽略
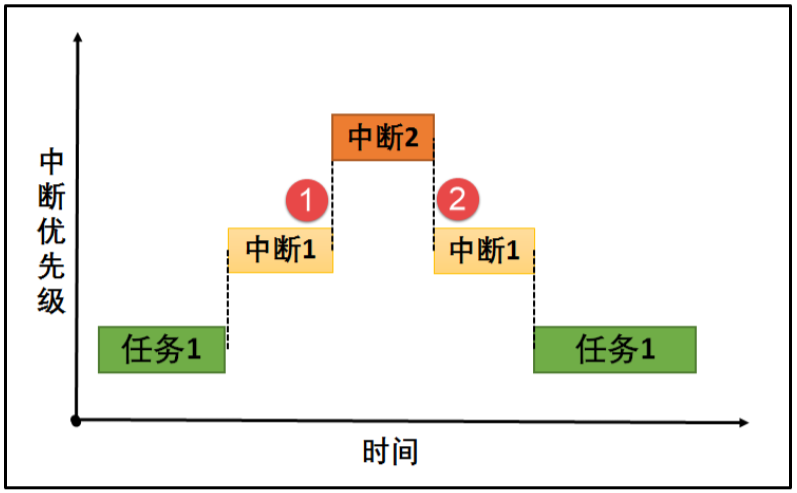
- 中断: 可以打断任何优先级的任务, 临界段中会挂起中断
- 相关硬件
- 外设: 外设需要请求CPU, 产生一个中断信号, 连接到中断控制器
- 中断控制器: CPU外设之一, 接收其他外设中断信号输入, 发出中断信号给CPU, 控制中断源优先级,触发方式,开关源
- CPU: 响应中断源请求, 当前任务->中断处理程序
- 概念
- 中断号: 每个中断请求信号有特定标志, 使计算机可判断哪个设备提出的中断请求
- 中断请求: 紧急事件向CPU提出申请要求CPU暂停当前执行任务, 处理紧急事件
- 中断优先级: 使系统及时响应, 处理所有中断, 由中断时间的重要性&紧迫程度, 分若干级别
- 中断处理程序: 产生中断请求后, CPU暂停当前任务响应中断申请, 执行中断处理程序
- 中断触发: 中断源发出, 送给CPU控制性能好, 触发器置1表明产生了中断
- 中断触发类型: 外部中断申请通过一个物理信号发到NVIC, 电平触发/边沿触发
- 中断向量: 中断服务程序入口地址
- 中断向量表: 存储中断向量, 对应中断号
- 临界段: 该部分代码执行时不允许任何中断
- 任务间发生
- 嵌套发生
- 中断延迟 = 识别中断事件 + [等待中断打开时间] + [关闭中断时间]
CPU使用率
- 外部变量统计时间, 消耗一个高精度定时器, 系统时钟节拍x10~20
vTaskGetRunTimeStats()获取任务相关信息vTaskList()获取CPU使用率信息
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)