目录
前言
1 全程快速微分器
1.1仿真分析
1.2仿真模型
1.3仿真结果
1.4结论
2 Levant微分器
2.1仿真分析
2.2仿真模型
2.3仿真结果
3.非线性跟踪微分器——韩教授
3.1仿真分析
3.2小结
4.总结
前言
工程上信号的微分是难以得到的,所以本文采用微分器实现带有噪声的信号及其微分信号提取,从而实现无需测量速度信号的控制。并且结合控制对象简单的用PID进行控制,即TD微分器+PID控制。
1 全程快速微分器
其中:
①x1为带有噪音的信号,也是TD的第一个状态变量,同理x2为信号的微分;
②R>0;a0、a1、b0、b1≥0;m和n为大于0的奇数,且m<n;
③当a1=b1=0时,上述微分器为线性微分器。
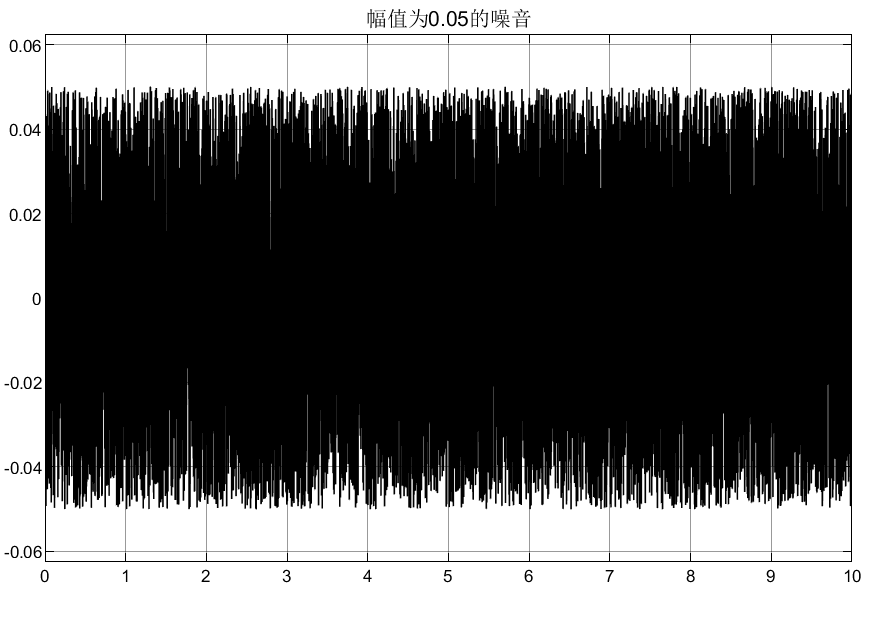
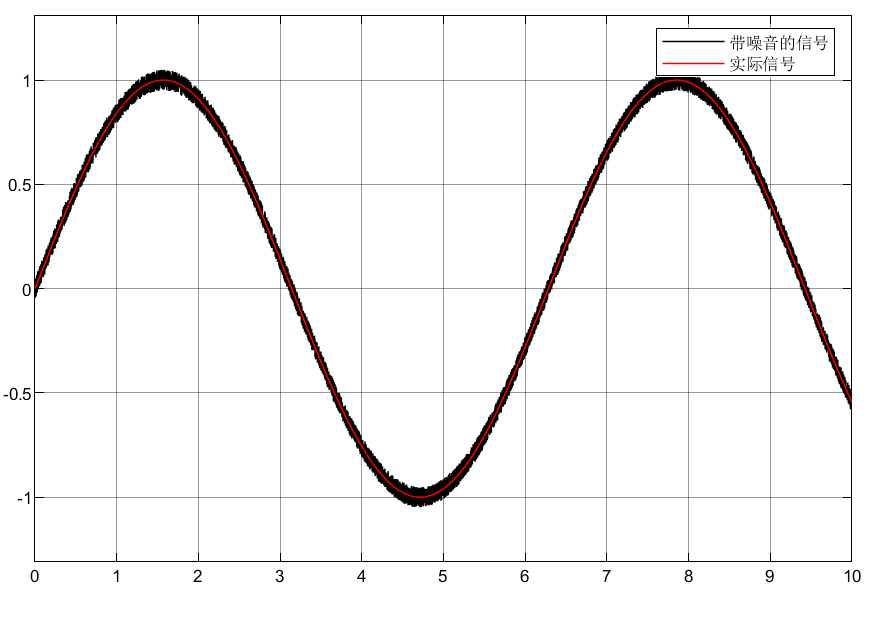
1.1仿真分析
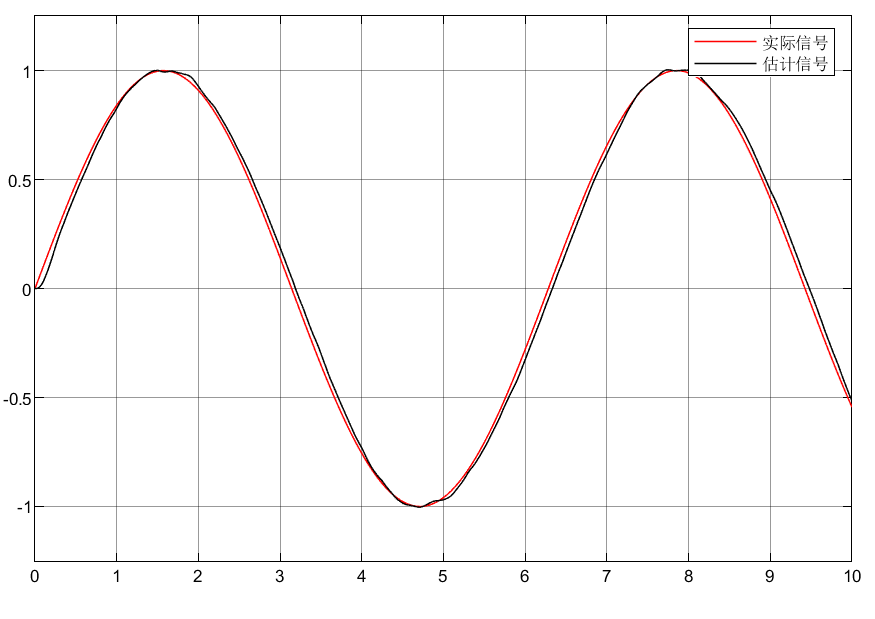
取R=1/0.05, a=0.1,b=0.1,已知输入信号为v(t)= sint,并且带有噪声信号,噪声的幅值为0.05,采用连续的全程快速微分器提取信号及信号的微分。
1.2仿真模型

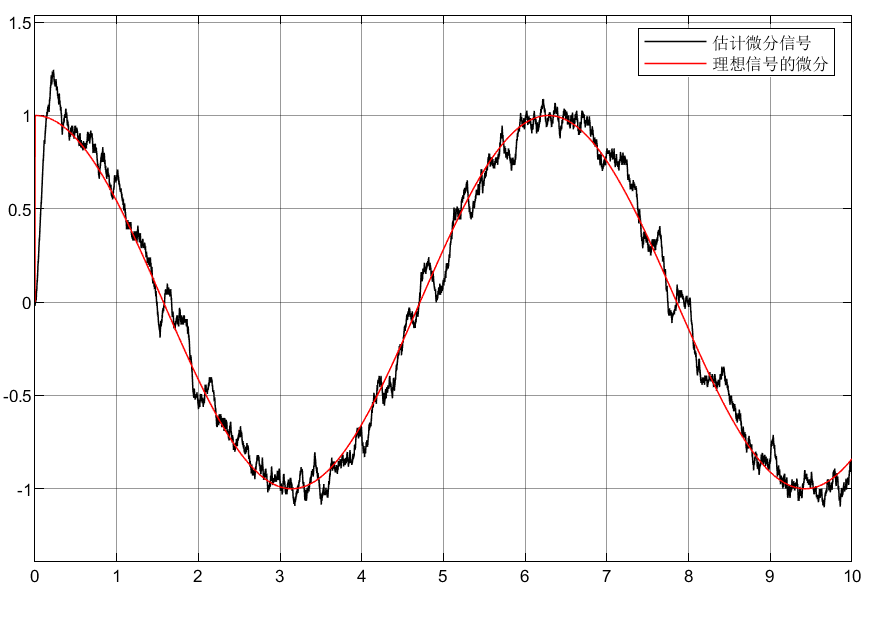
1.3仿真结果
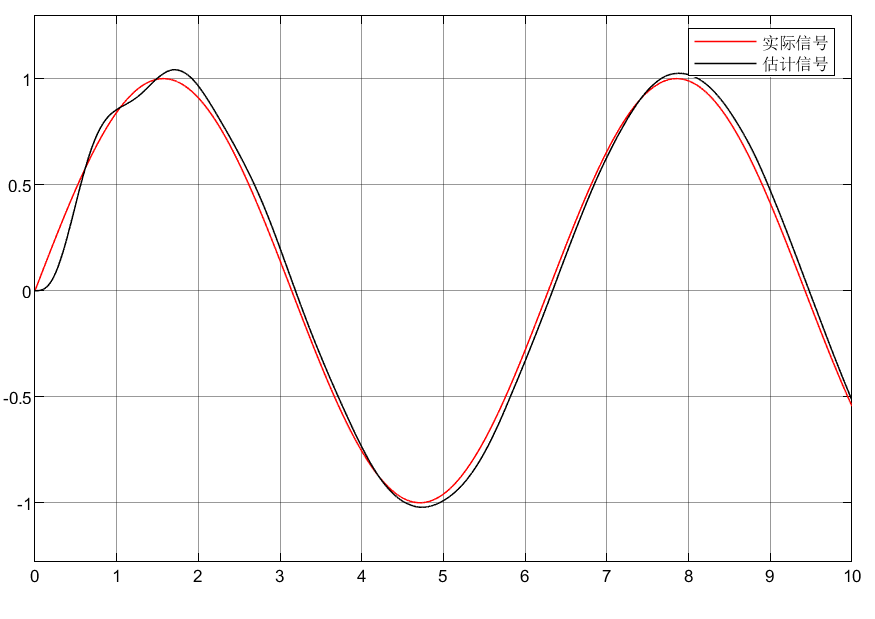
1.4结论
①可以看到虽然和实际信息有些偏差,但是估计的效果还算可以。
②对于a1、b1≠0的非线性微分器好像调节效果和线性差不多,即a1、b1、m、n调节没效果?
③位移信号可以调节的很好,但是会牺牲微分信号。
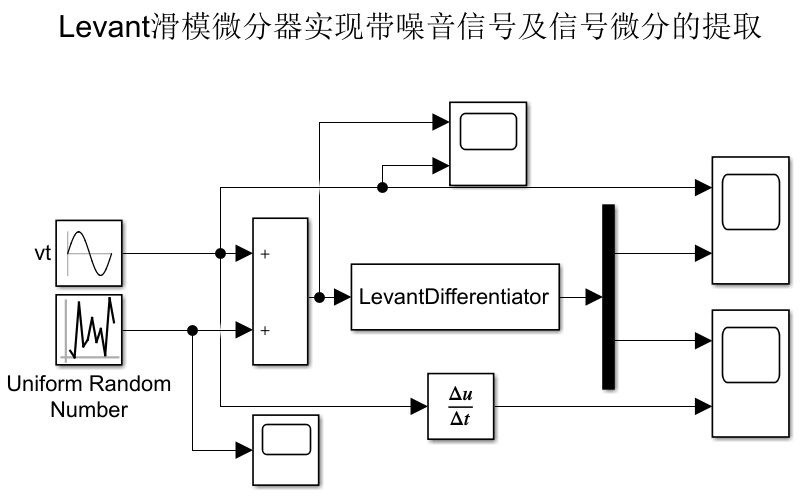
④仿真注意:(1)噪声模块的采样时间为继承采样时间;(2)simulink仿真求解步长为定步长0.001
2 Levant微分器
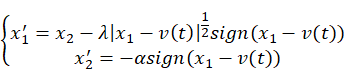
微分器需要对信号的测量误差和输入噪声具有鲁棒性,而Levant微分器是基于滑模奇数的非线性微分器,其二阶微分器表达形式为:

对于Lipschitz的定义部分可参考下面博客的3.1部分:
基于LMI的非线性混沌系统滑模控制_Mr. 邹的博客-CSDN博客
注:虽然这类微分器具有滑模控制的鲁棒性,但是对于Levant微分器,需要事先知道输入信号v(t)导数的Lipschitz常数上界,才能设计微分器参数,这就限制了输入信号的类型。而且,对于这种微分器,抖振现象不可避免。
2.1仿真分析
同样取上述的噪音信号及其微分进行估计,选取参数:
①Lipschitz的常数上界为1,即C = 1,所以α > 1,取α = 18;
②λ > 4*C*(α+C)/(α-C),得λ≥4.4706,所以取λ = 6。
2.2仿真模型
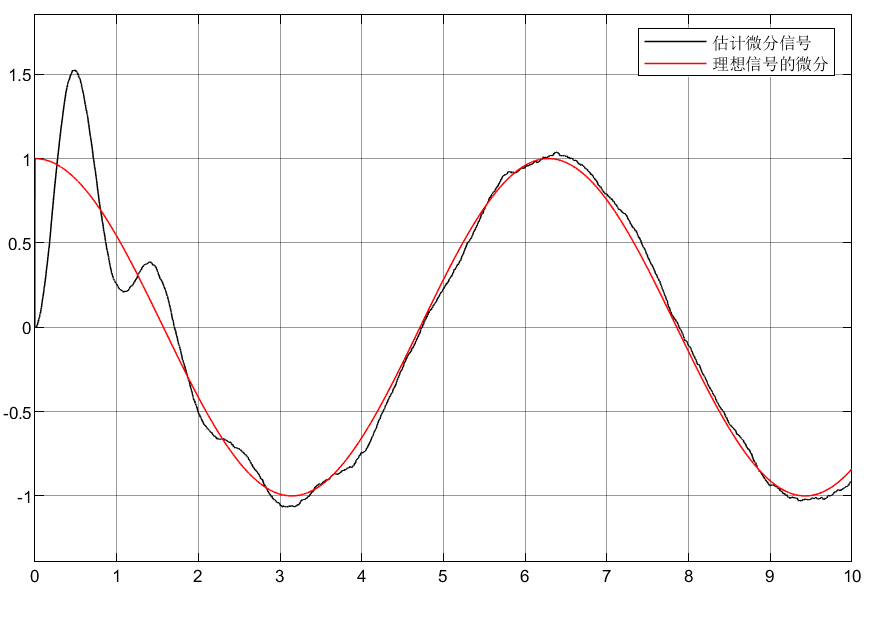
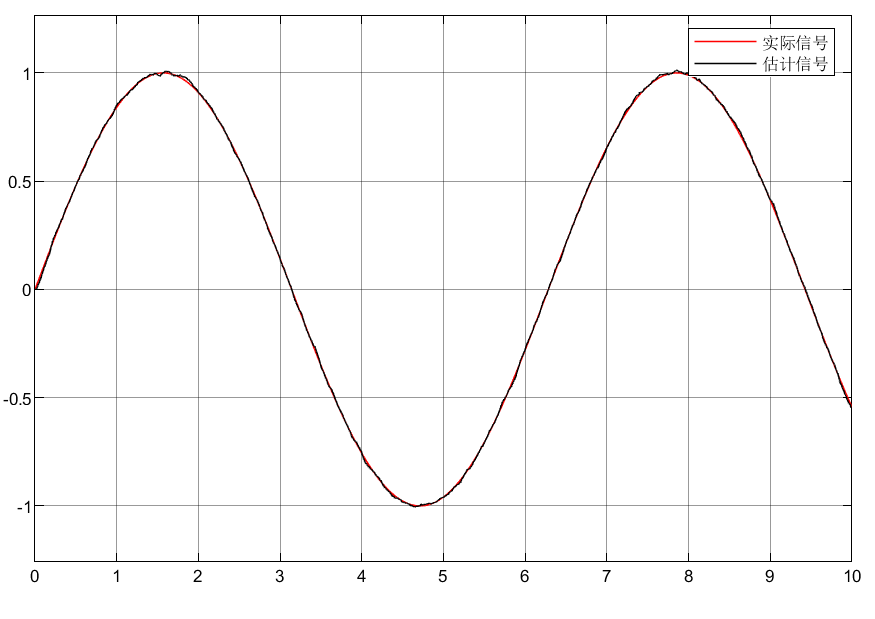
2.3仿真结果
3.非线性跟踪微分器——韩教授
韩京清教授利用二阶最速开关系统构造出跟踪不连续输入信号并提取近似微分信号的机构,提出了非线性跟踪-微分器的概念。韩京清所提出的一种离散形式的非线性微分跟踪器在一些运动控制系统中得到了应用。
二阶离散系统:

离散形式的非线性微分跟踪器为:

注:
①f代表的是最速综合函数
②朱老师书中称这类非线性的跟踪微分器为最速反馈系统,个人理解的是:是因为信号和信号的微分相当于等价于一个二阶系统,现在设计微分跟踪器去复刻这个二阶系统,可以理解为这个信号系统的观测器。(欢迎批评指正!)
③实现x1跟踪信号v,x2跟踪信号微分v'
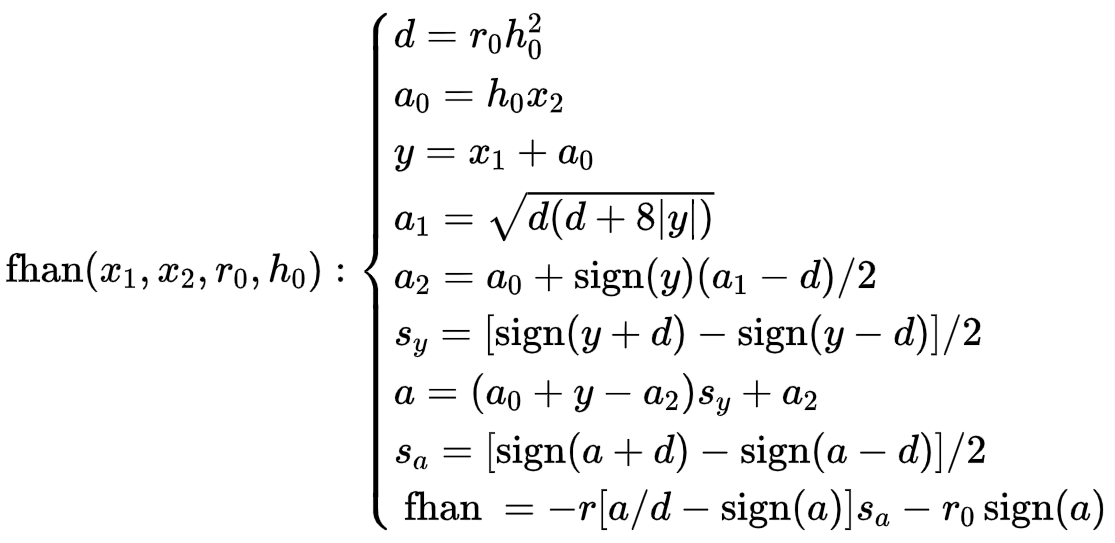
这里参考刘老师和朱老师的书籍有两种最速综合函数(还有很多,读者自行阅读文献仿真比对):
(1)最速综合函数fst:
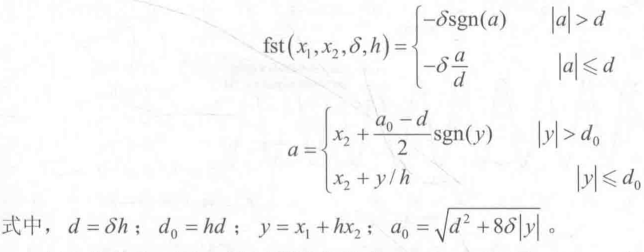
(2)最速综合函数fhan:
注:最速函数中的x1实际上就是x1(k)-v(k),x2为x2(k).
3.1仿真分析
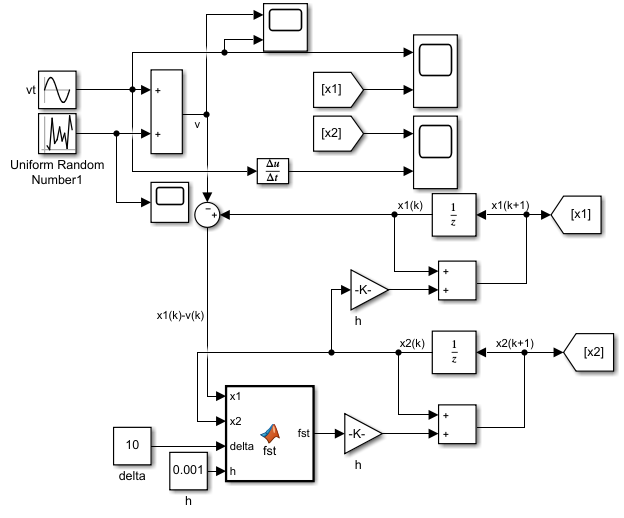
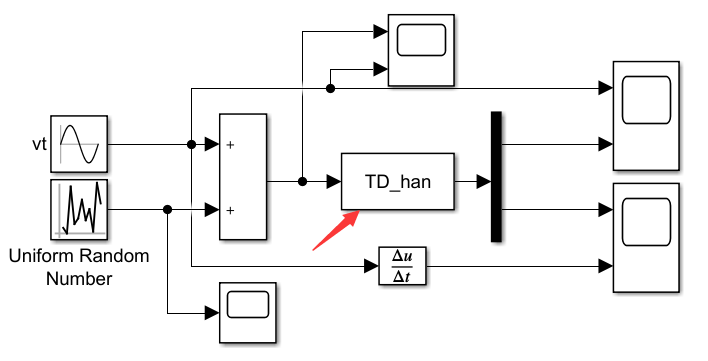
由于韩教授提出的非线性微分跟踪器是离散的,且被控对象常常使用simulink建模连续系统,所以这里介绍三种TD建模方式:①采用纯m语言建模(编写在Function模块种);②Function模块定义最速综合函数f+simulink结合unit delay建模;③s函数编写TD微分跟踪器。
①采用纯m语言建模(编写在Function模块种)
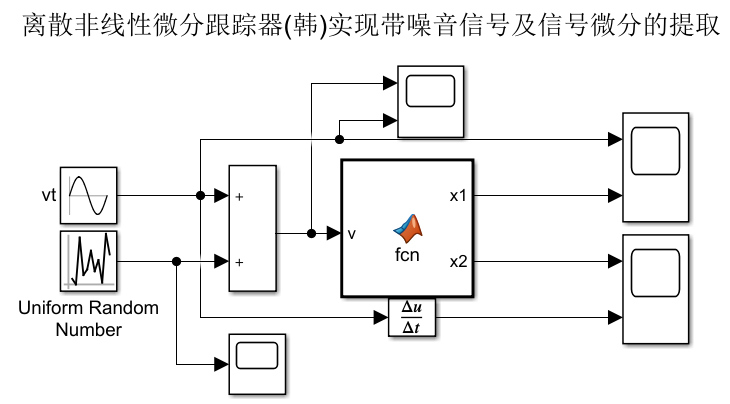
②Function模块定义最速综合函数f+simulink结合unit delay建模
③s函数编写TD微分跟踪器
3.2小结
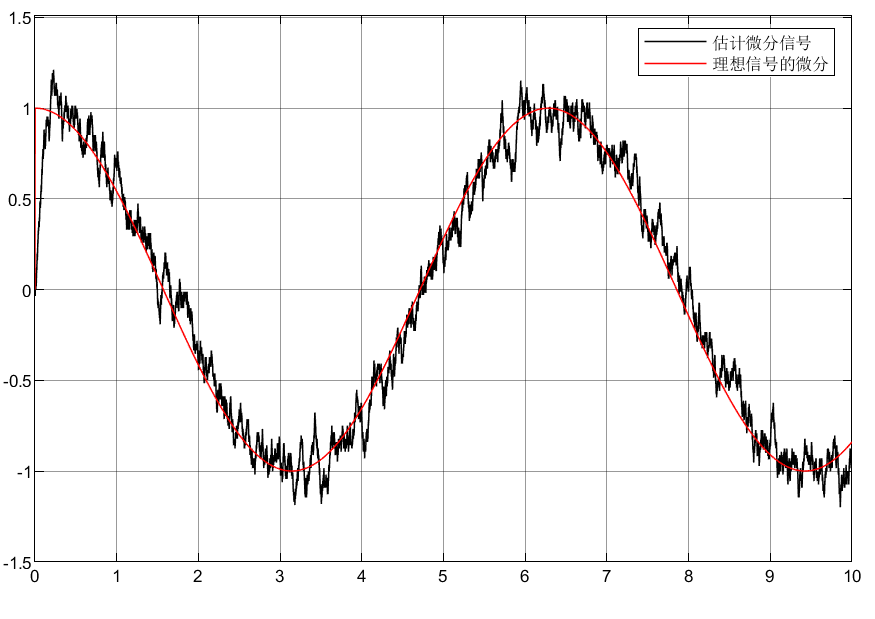
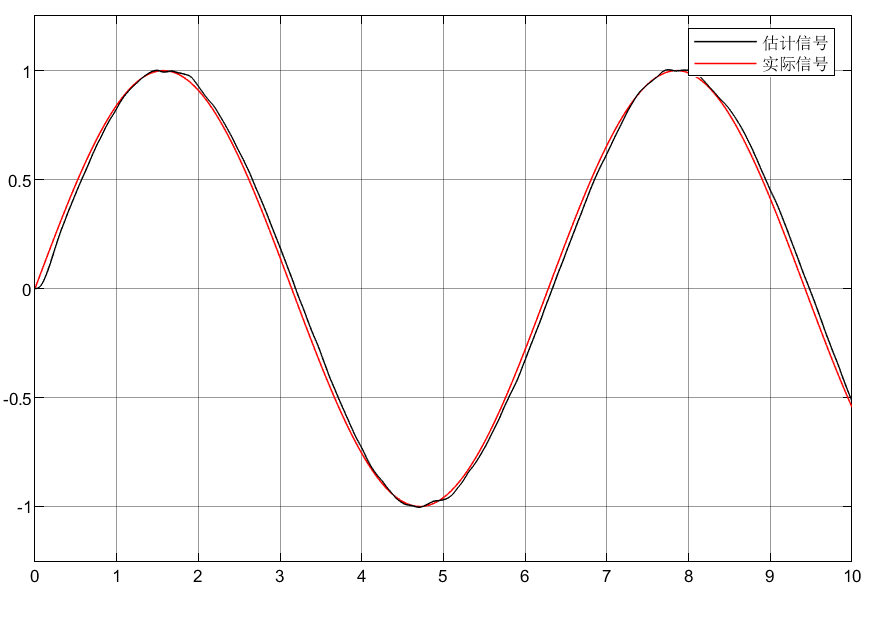
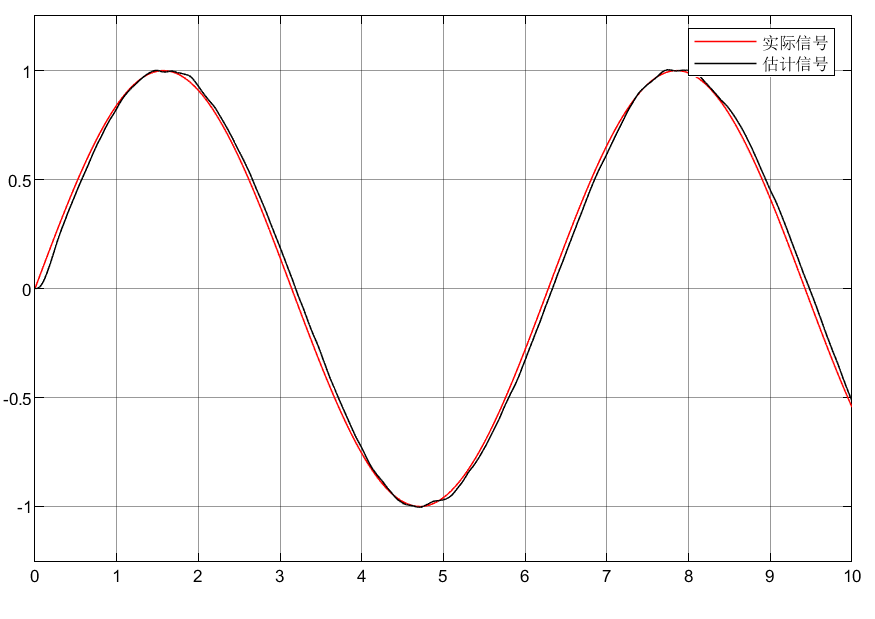
可以看到两种方法仿真的结果都一致,读者也可以试试全部用m语言编写。
4.总结
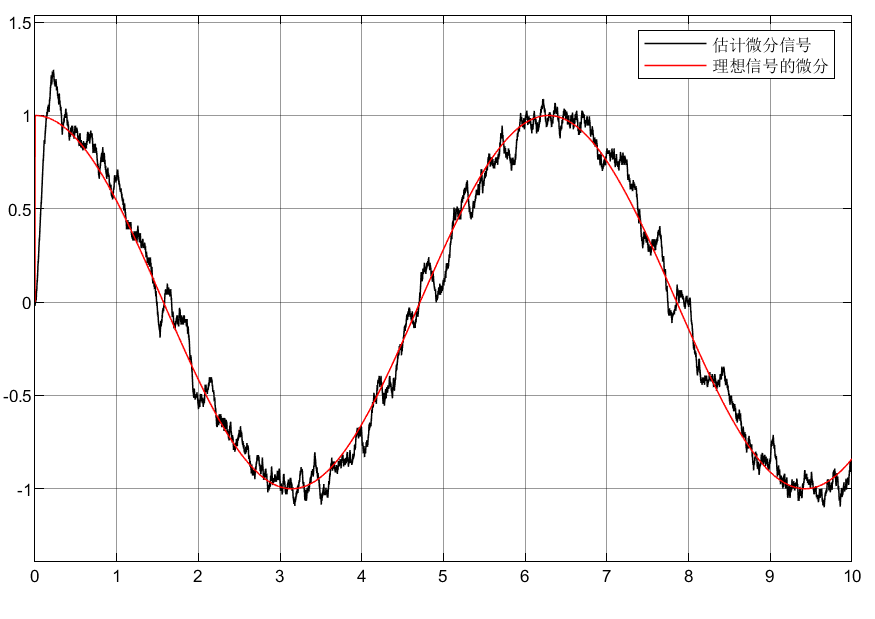
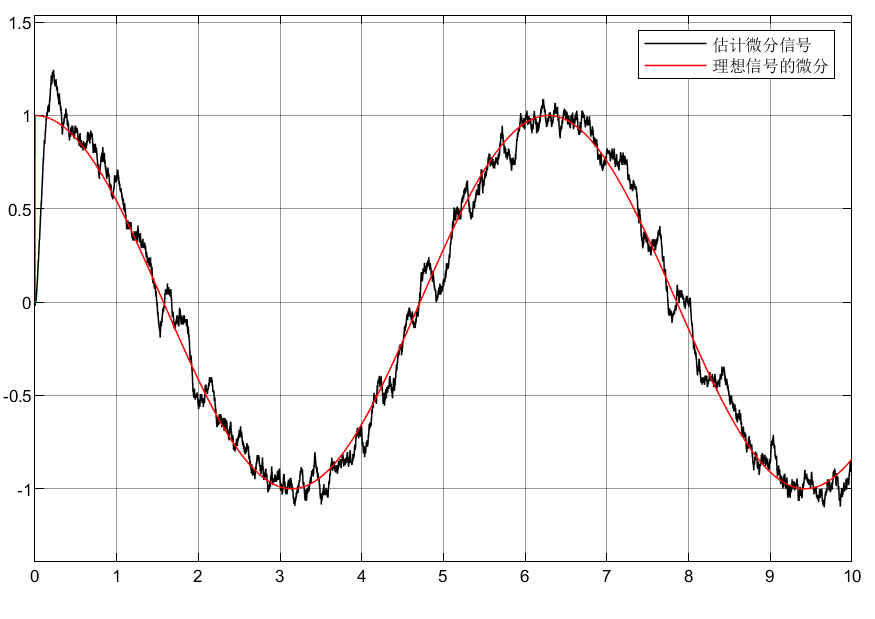
①可以看到两种微分器都能将实现带噪声信号的估计,虽然有一定的误差
②信号的微分估计的稍差一些
③注意仿真时噪声模块的采样时间设定为继承采样时间:-1;且simulink设定为定步长0.001的求解器。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)