
1 任务的引入_ARM框架
任务:**一段代码;运行位置;运行环境----------------->即运行起来的函数**
补充ARM架构,以F103为例;数据保存在内存,代码保存在Flash

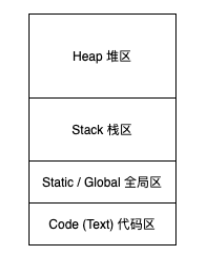
** 内存四区**
> 堆区(heap):一般由程序员手动分配释放(动态内存申请与释放),若程序员不释放,程序结束时可能由操作系统回收。
> 栈区(stack):由编译器自动分配释放,**存放函数的形参、局部变量**等。当函数执行完毕时自动释放。
> 全局区(global /stack):用于存放全局变量和静态变量, 里面细分有一个常量区,一些常量存放在此。该区域是在程序结束后由操作系统释放。
> 代码区(code/ text):用于存放程序代码,字符串常量也存放于此。 ————————————————
> 内存四区原文链接:https:
1.1 探究 代码执行流程
a=a+b;

1.1.1 读变量,读到哪里去—寄存器
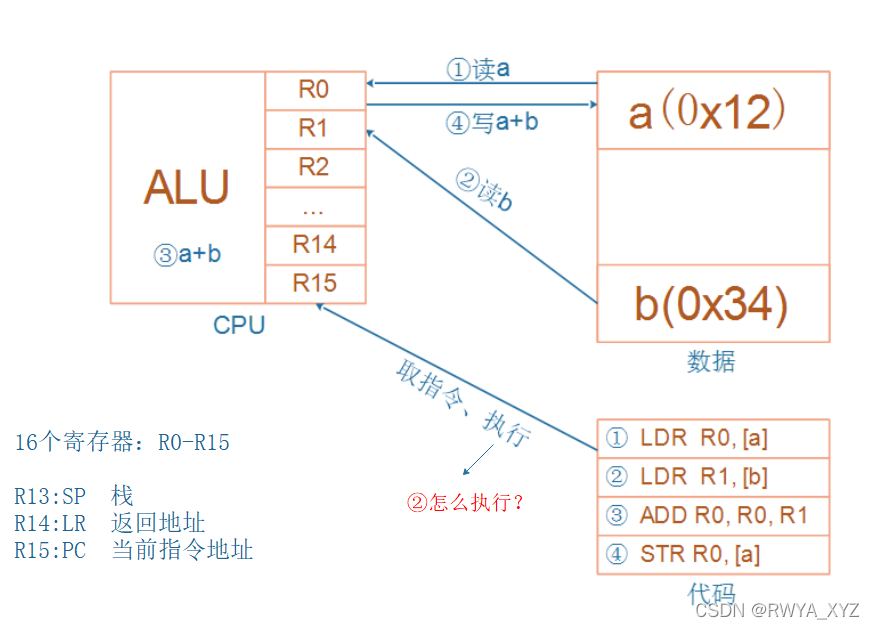
**CPU运行时,先去Flash上取得指令,再执行指令:
* 把内存a的值读入CPU寄存器R0
* 把内存b的值读入CPU寄存器R1
* 把R0、R1累加,存入R0
* 把R0的值写入内存a
** CPU内部有R0、R1、……、R15共16个寄存器
* R13,别名SP,栈寄存器,保存着栈的地址
* R14,别名LR,返回地址,保存着函数的返回地址
* R15,别名PC,程序计数器,也就是当期程序运行到哪了

1.1.2 常用汇编指令补充

* 读内存:Load,LDR
* 写内存:Store,STR
* 加法:ADD
* 入栈:PUSH,实质上就是写内存STR
* 出栈:POP,实质上就是读内存LDR
* LDR R0, [R1, #0x00]
* 源地址:R1+0x00,注意:不是读R1,是把R1的值当做内存的地址
* 目的:R0,CPU的寄存器
* 长度:4字节,LDR指令就是读4字节,LDRH是读2字节,LDRB是读1字节
要写内存:写内存哪个地址?从哪里得到数据?写多少字节?
* STR R0, [R1, #0x00]
* 目的地址:R1+0x00,注意:不是写R1,是把R1的值当做内存的地址
* 源:R0,CPU的寄存器
* 长度:4字节,STR指令就是读4字节,STRH是读2字节,STRB是读1字节
入栈:把CPU的寄存器的值,写到内存上
* PUSH {R3, LR}
* 源:CPU的寄存器R3、LR的值
* 目的:内存,内存哪里?使用CPU的SP寄存器指定内存地址
* 长度:大括号里所有寄存器的数据长度,每个寄存器4字节
* 注意:低编号的寄存器,保存在内存的低地址处
出栈:把内存中的数值,写到CPU的寄存器
* POP {R3, PC}
* 源:内存,内存哪里?使用CPU的SP寄存器指定内存地址
* 目的:CPU的寄存器R3、PC的值
* 长度:大括号里所有寄存器的数据长度,每个寄存器4字节
* 注意:内存的低地址处的数据,写到CPU低编号的寄存器
1.2 栈的作用
1.2.1 代码运行汇编分析



1.2.2 栈与现场
> ① 什么是现场?
>
> 暂且认为现场就是:当前被打断瞬间所有寄存器的值
>
> ② 怎么保存现场?
> 保存现场 :保存在内存里 ③ 内存在哪里? 16个寄存器保存在栈里
>
> 任务:函数+保存现场(栈)==运行中的函数
③ 保存现场的几种场景
任务切换:
保存所有寄存器的值
函数调用:
保存某些寄存器
传参--不用保存
中断处理:
硬件:保存一部分----栈
软件处理中断:保存一些用到的寄存器
2 创建函数任务
2.1 创建任务的函数简析
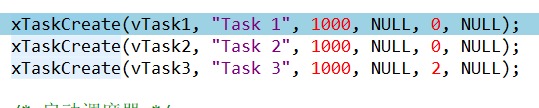
xTaskCreate函数原型:

> xTaskCreate函数:
> pxTaskCode:函数
> pcName: 任务名
> usStackDepth:栈大小,malloc 分配
> pvParameters:参数
> uxPriority:优先级
> pxCreatedTask:TCB结构体
2.2 创建任务的内部细节
2.2.1 TCB结构体

参数详解:
* 分配了TCB结构体
* 分配了栈
* 在栈里写入了函数地址、参数
```c
> 启用vTask函数:**往PC里放入函数地址,R0寄存器放入参数**
结构体成员

栈的大小分配
> 从哪里分配?
> 从1个巨大数组划分一部分内存用作栈,如下图,起始地址保存在TCB的pxSTACK里。
> 分配多大?
> 局部变量和调用深度


2.2 任务的调度机制与任务切换
2.2.1 优先级与状态
1 优先级不同
> 高优先级的任务,优先执行,可以抢占低优先级的任务
> 高优先级的任务不停止,低优先级的任务永远无法执行
> 同等优先级的任务,轮流执行:时间片轮转
2 状态
> 运行态:running
> 就绪态:ready
> 阻塞:blocked,等待某件事(时间、事件)
> 暂停:suspend,休息去了
2.2.2 任务调度
3 怎么取出要运行的任务
> 找到最高优先级的运行态、就绪态任务,运行它
>
> 如果大家平级,轮流执行:排队,链表前面的先运行,运行1个tick后乖乖地去链表尾部排队
>
>

4 谁进行调度?
> * TICK中断-----即定时器中断
2.2.3 任务状态的切换

不同的链表来维护不同状态的任务。
高优先级的任务3完成后从就绪ready链表进入delay链表,----->任务1,2得以执行
空闲任务:IdleTask: 清理工作
五个tick 后再次进入ready链表,继续统治
2.3 任务调度深入探讨
通过链表深入理解调度机制
* 可抢占:高优先级的任务先运行
* 时间片轮转:同优先级的任务轮流执行
* 空闲任务礼让:如果有同是优先级0的其他就绪任务,空闲任务主动放弃一次运行机会

3 消息队列(queue)
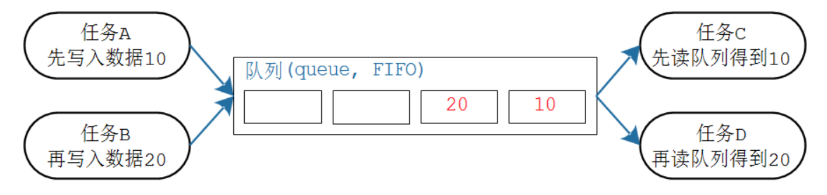
3.1 多任务系统中的互斥引入


定义全局变量a,多任务系统:A,B函数,均进行a++;--------------a=1
如何引入互斥机制,保证数据的可控性?
使用队列,用已经写好的API函数,关中断---写数据----开中断。
3.2 队列 好处


3.3 环形缓冲区

队列核心是:关中断、环形缓冲区、链表
3.4 队列结构体



3.4.1 队列读流程

3.4.2 队列写流程

4 信号量和互斥量
4.1 信号量操作流程
信号量核心: 计数值;
int count; list;
**1 获取信号量: Take 操作**
a 关中断
b if (count>0){
count--;
return ok;
}
c else {
(1)return Error;
(2)休眠:
a):放入SemaphoreList
b):ReadList[]--->DelayList
d 被唤醒:
count--;
return ok;
**2 释放信号量: Give 操作**
a 关中断
b count++;
c SemaphoreList非空?有任务等待? wake up它。

4.2 互斥量


互斥量就是特殊的队列。
互斥量更是特殊的信号量,
互斥量实现了优先级继承。
低优先级任务获得互斥量,此时高优先级任务索取互斥量----->失败休眠。
HPTask提升低优先级的等级(优先级继承),使其快速搞定释放互斥量,然后恢复自己卑劣的地位,并唤醒HPTask;

5 事件组

1 创建
2 等待(哪些位? 与/或,timeout)
a 关调度器
b 当前事件变量uxEventBits是否满足需要
满足;
不满足:返回Err
休眠:放入 event_group; readlist---->delayedList
3 设置事件
a 设置事件: uxEventBits
b 唤醒xTaskWatingForBits队列上“所有”满足条件的任务
事件组为什么不关中断?
事件中的中断不会设置“值”,只是触发/唤醒“守护任务”
6 任务通知的内部机制
### 8.1 核心: 通知状态、通知值
#### 8.1.1 通知状态
一个任务的"通知状态"有三种:
- taskNOT_WAITING_NOTIFICATION:任务没有在等待通知
- taskWAITING_NOTIFICATION:任务在等待通知
- taskNOTIFICATION_RECEIVED:任务接收到了通知,也被称为 pending(有数据了,待处理)
一个任务想等待别人发来通知,可以调用`ulTaskNotifyTake `或`xTaskNotifyWait `:
- 可能别人早就发来通知:"通知状态"为taskNOTIFICATION_RECEIVED,那么函数立刻返回
- 可能别人还没发来通知:这些函数把"通知状态"从taskNOT_WAITING_NOTIFICATION
- 改为taskWAITING_NOTIFICATION,然后休眠
别的任务可以使用`xTaskNotifyGive`或`xTaskNotify `给某个任务发通知:
- 会马上唤醒对方
- 无条件唤醒对方,不管对方期待什么数据



本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)