NoMachine for mac是一款免费的远程桌面访问工具,这款软件的连接到远程桌面后延迟可以非常低,NX协议在高延迟低带宽的链路上提供了近乎本地速度的响应能力,打破空间和时间的障碍,让您的桌面环游世界。
1.环境配置
服务端:Ubuntu18.04
客户端:window10
2.下载Nomachine
官网连接:https://downloads.nomachine.com/
3.安装
window10:
下载安装包,双击安装,一路默认即可

ubuntu18.04:
我的硬件是x86架构,下载的第二个:二进制
sudo dpkg -i nomachine_8.2.3_4_amd64.deb
AMD64 :基于x86的64位架构,amd64=x86_64=x64
x86-64是1999年由AMD设计,该64位集主要用于扩充IA-32,成为x86-64,后来改为AMD64
4.连接
先将服务端和客户端保持在同一个网段,并可以相互ping通:
服务端:192.168.1.101
客户端:192.168.1.100
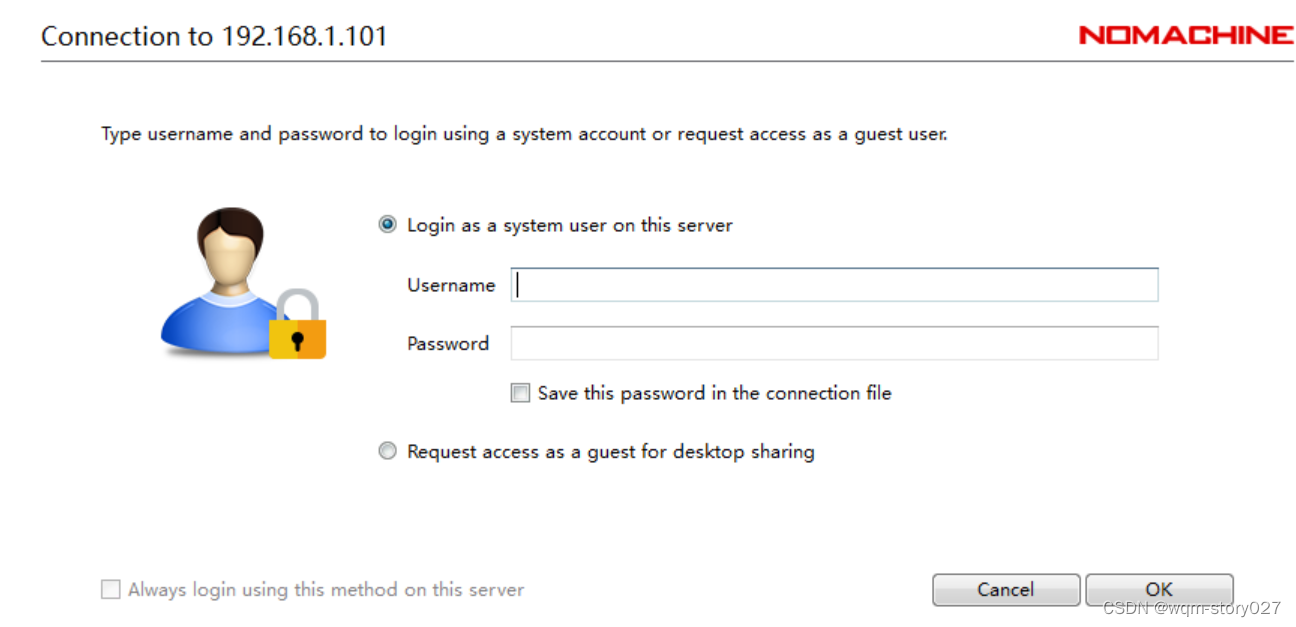
输入服务端IP,进行搜索连接:

输入用户名,密码登录即可
5.遇到的问题
问题1:
The remote host '192.168.1.101' refused to establish a network connection on port '4000'. Please verify that NoMachine is correctly installed and listening on the port where you are trying to connect, and that incoming traffic is not being blocked by a firewall or NAT.
解决:
(1)关闭防火墙
sudo ufw status #查看防火墙状态
sudo ufw enable #开启防火墙
sudo ufw disable #关闭防火墙
(2)关闭防火墙不起作用,服务端是否安装nomachine, 如果没有,则进行安装
问题2:
nomachine连接一台服务器(未接显示器)时,可以登录,但是登录后现实黑屏。
解决:
在服务器上手动关闭X server,采用Nomachine自带的显示服务:
sudo systemctl stop gdm3
sudo /etc/NX/nxserver --restart
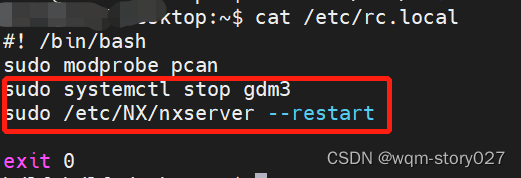
断电重启后,依然黑屏,需要设置开机自启动:
将上面两条命令写入/etc/rc.local中:
sudo vi /etc/rc.local
##重启服务
sudo systemctl enable rc-local
sudo systemctl start rc-local.service
断电重启之后,远程连接桌面正常,ubuntu开机自启动设置参考:ubuntu18.04设置开机启动命令/脚本
问题3:
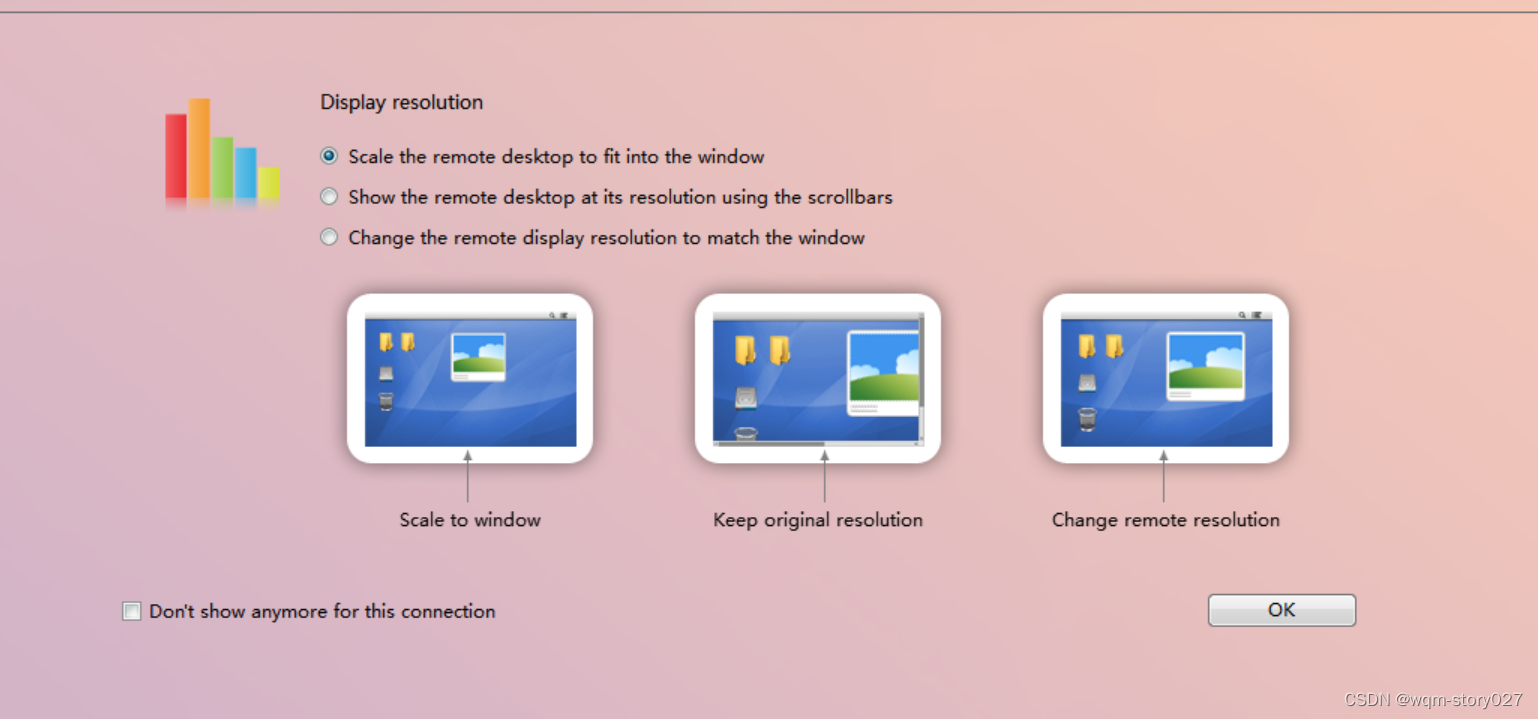
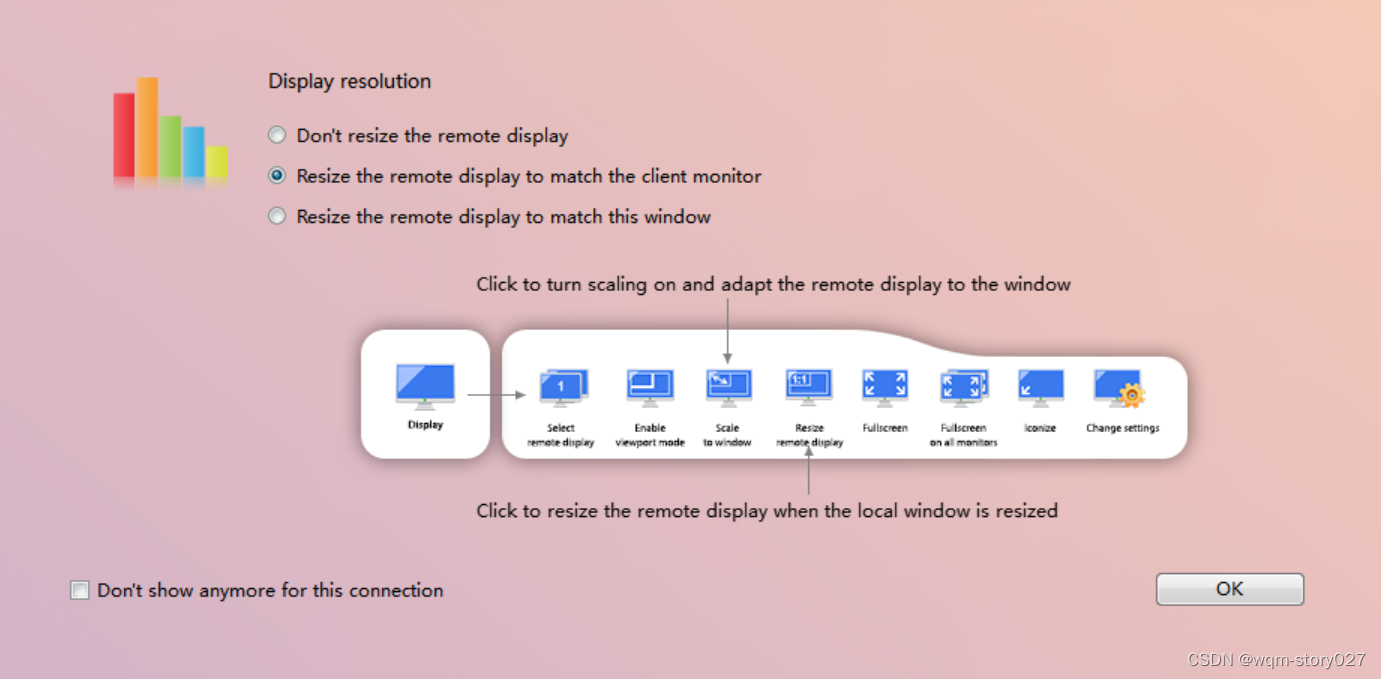
远程登录之后出现的分辨率变低,图标变大,分辨率调整,登录之后在Display resolution第一页选择第一项以原始分辨率展示,下一页选择第二项匹配客户端分辨率
或执行命令:
xrandr --fb 1280x720 #分辨率
或:
xrandr -s 1280x720 #分辨率
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)