总结:
文章主要介绍了仅用IMU作为输入的深度学习网络来估计相对位移,估计的结果用于EKF更新,可以得到较为准确的EKF估计状态。
摘要
惯性里程计是敏捷无人机状态估计的一个具有吸引力的方案。单纯的使用IMU积分会有较大的偏移。目前基于运动先验的行人步速惯性里程计取得了显著的进展。但是无法用于无人机。本文提出了一种基于深度学习的惯性里程计用于无人机飞行任务。我们系统的核心是去耦合一个基于模型的滤波器,由惯性单元驱动,以及一个基于学习的单元来生成控制指令。结果显示我们的惯性里程计算法由于目前基于滤波和基于优化的方法。此外,结果显示我们的系统和基于视觉的已知门位置的VIO算法效果相当。
方法
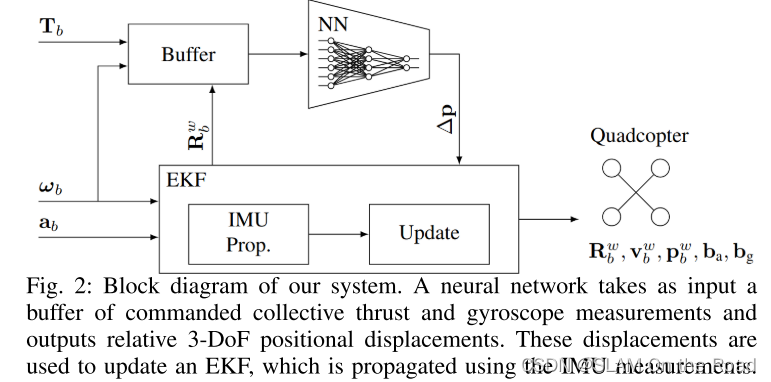
神经网络将一组thrust和角速度作为输入, 输出3DoF的相对位置偏移,该偏移量作为EKF的观测,进行更新。EKF最终输出当前无人机的系统状态,包括旋转,速度,位置,bias。该方法命名为IMO。
将IMO的输出基础上,在根据检测的图像中门的角点进行融合,门的3D点位置已知。该方法命名为Gate-IO。图像中门的2D点检测通过CNN网络识别。
网络结构
采用TCN来学习相对位移,输入一组thrust和角速度,测量转到了世界坐标系下,且gyro移除了bias。训练时,采用动态捕捉系统的真实旋转。部署时, 采用EKF估计的旋转。为了增强鲁帮性,训练时,在真值旋转上增加了零均值的高斯噪声。损失函数为输入的测量时间间隔的真实相对位移和网络输出位移的MSE误差:

EKF
参考文章: A multi-state constraint kalman filter for vision-aided inertial navigation
门CNN检测
参考文章: Alphapilot: Autonomous drone racing
对比结果
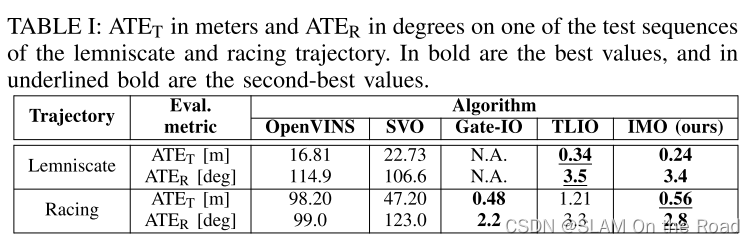
可以看到,IMO的结果最优。这里的TLIO算法是SOTA的IO算法,采用残差网络,输入一组IMU数据,输出相对的IMU位移。网络的输出用于更新EKF。
TLIO 算法
参考文章: Tlio: Tight learned inertial odometry
摘要
文章提出了一种仅采用IMU的紧耦合的EKF状态估计器。
方法
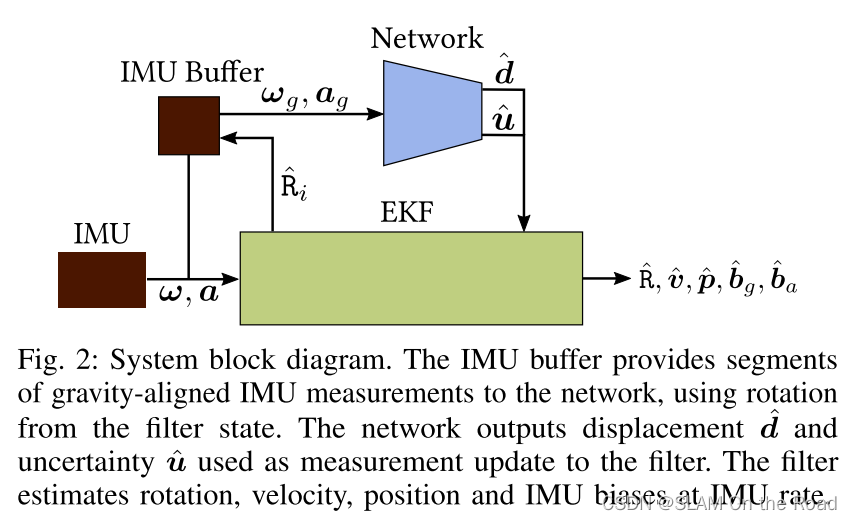 网络输入一组重力对齐的IMU测量数据,输出相对位移和不确定度。网络输出的结果作为EKF的观测,进行EKF更新,最终得到EKF的更新状态。
网络输入一组重力对齐的IMU测量数据,输出相对位移和不确定度。网络输出的结果作为EKF的观测,进行EKF更新,最终得到EKF的更新状态。
网络结构
采用ResNet18架构,输入Nx6的IMU数据。输出两个三维向量,一个是相对位移,一个是相对位移的不确定度。
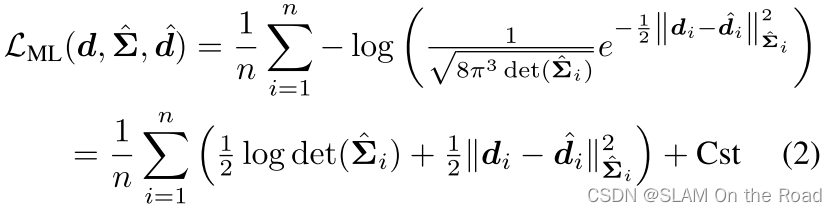
训练时,网络定义了两个不同的损失函数:MSE误差和高斯最大似然误差:

优化器采用Adam优化器。
EKF
IMU积分得到预测状态和方差,网络输出的相对位移和方差进行EKF更新。
更新后,所有窗口中的状态先验被边缘化掉。边缘化采用直接删除对应的状态和方差列。滤波保留的状态依赖于两个参数: 网络训练窗口的位移,更新频率。例如,以20Hz的频率更新,滑窗1s, 则窗口中有21个历史状态。EKF的初始状态由外部提供。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)