Airsim中运行OpenVINS和VINS_Fusion
- 1. 简介
- 2. 参考
- 3. 步骤
- 3.1 编译
- 3.2 运行
- 3.3 运行结果
- 3.4 相机和IMU参数配置
1. 简介
本文简介在Airsim中运行OpenVINS和VINS_Fusion.
2. 参考
- 无人飞行器智能感知技术竞赛 赛事公告
- 在AirSim中控制无人机平台并采集数据
- OpenVINS 官网
- AirSim中运行VIO算法(VINS-Mono)
3. 步骤
3.1 编译
- 模拟器和Airsim_ros_wrapper下载安装
参考该工程的README.md文件,本文按照“LINUX 单机开发模式”进行配置。
(1)模拟器下载(simulator_LINUX.zip)
在浏览器中输入此网址即可开始下载:
https://stg-robomasters-hz-q0o2.oss-cn-hangzhou.aliyuncs.com/simulator/simulator_LINUX.zip
(2)airsim_ros_wrapper下载
git clone https:
-
OpenVINS 下载安装
参照 OpenVINS的说明文档,安装OpenVINS.
-
VINS_Fusion下载安装
参照VINS-Fusion的README.md, 安装VINS-Fusion.
-
键盘控制脚本
这个博客中提供了一个“无人机控制“的python脚本。复制该脚本的内容,保存为本地文件"airsim_keyboard.py"。
3.2 运行
- 启动Airsim仿真器 ( simulator_LINUX.zip )
python launcher.py
输入本机IP地址, 127.0.0.1; 启动成功之后,按键“3”, 切到 3.自主飞行-双目 模式。
2. 启动Airsim_ros_wrapper
cd ${YourPath}/IntelligentUAVChampionshipSimulator/roswrapper
source ros/devel/setup.bash
./simulator.sh 127.0.0.1
用于将收到的Airsim中的数据通过ROS发布出来。
3. 启动OpenVINS
cd ${YourPath}/openvins_ws
source devel/setup.bash
roslaunch ov_msckf airsim.launch
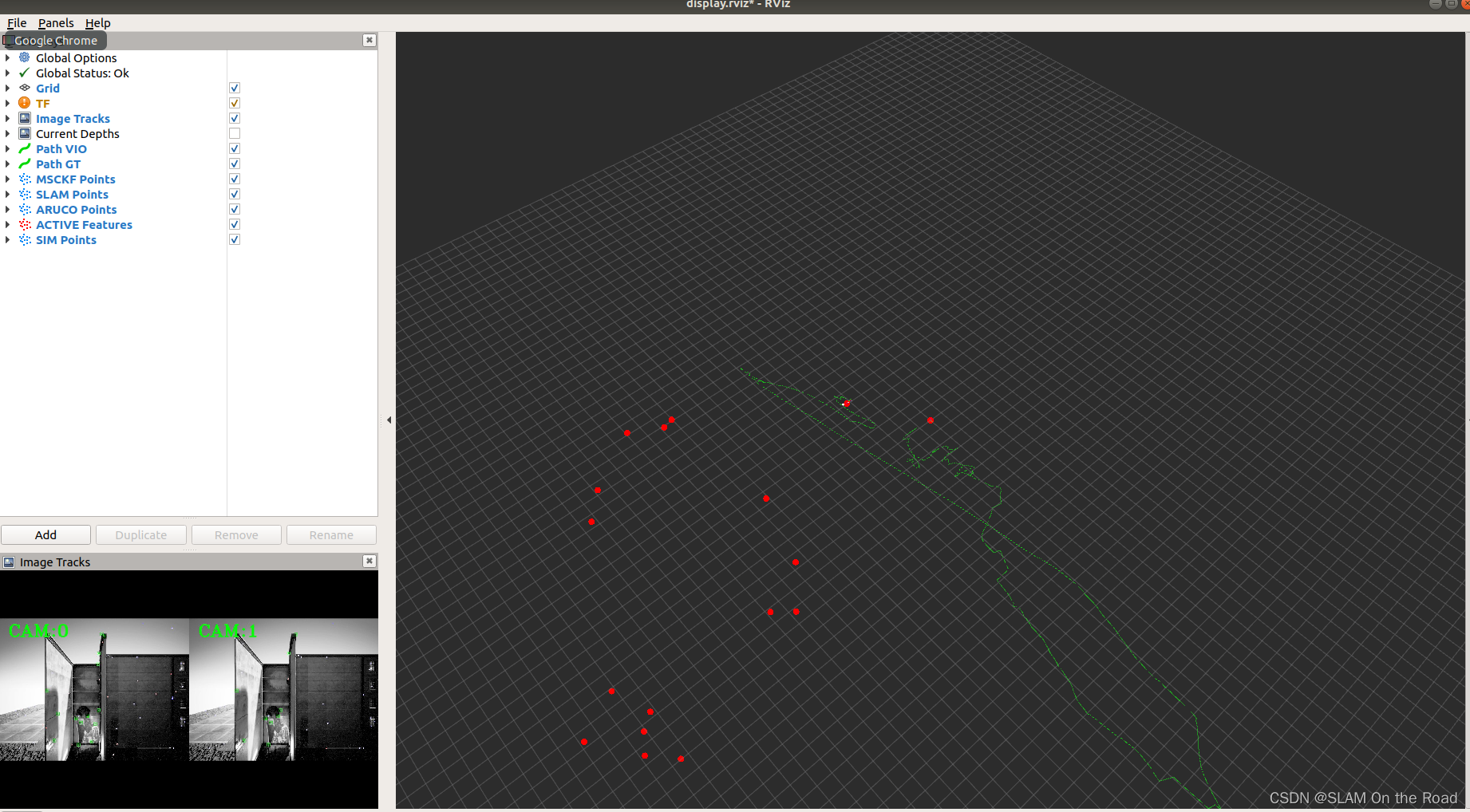
打开另一个终端,rviz显示openvins运行情况:
rviz -d '${YourPath}/openvins_ws/src/open_vins/ov_msckf/launch/display.rviz'
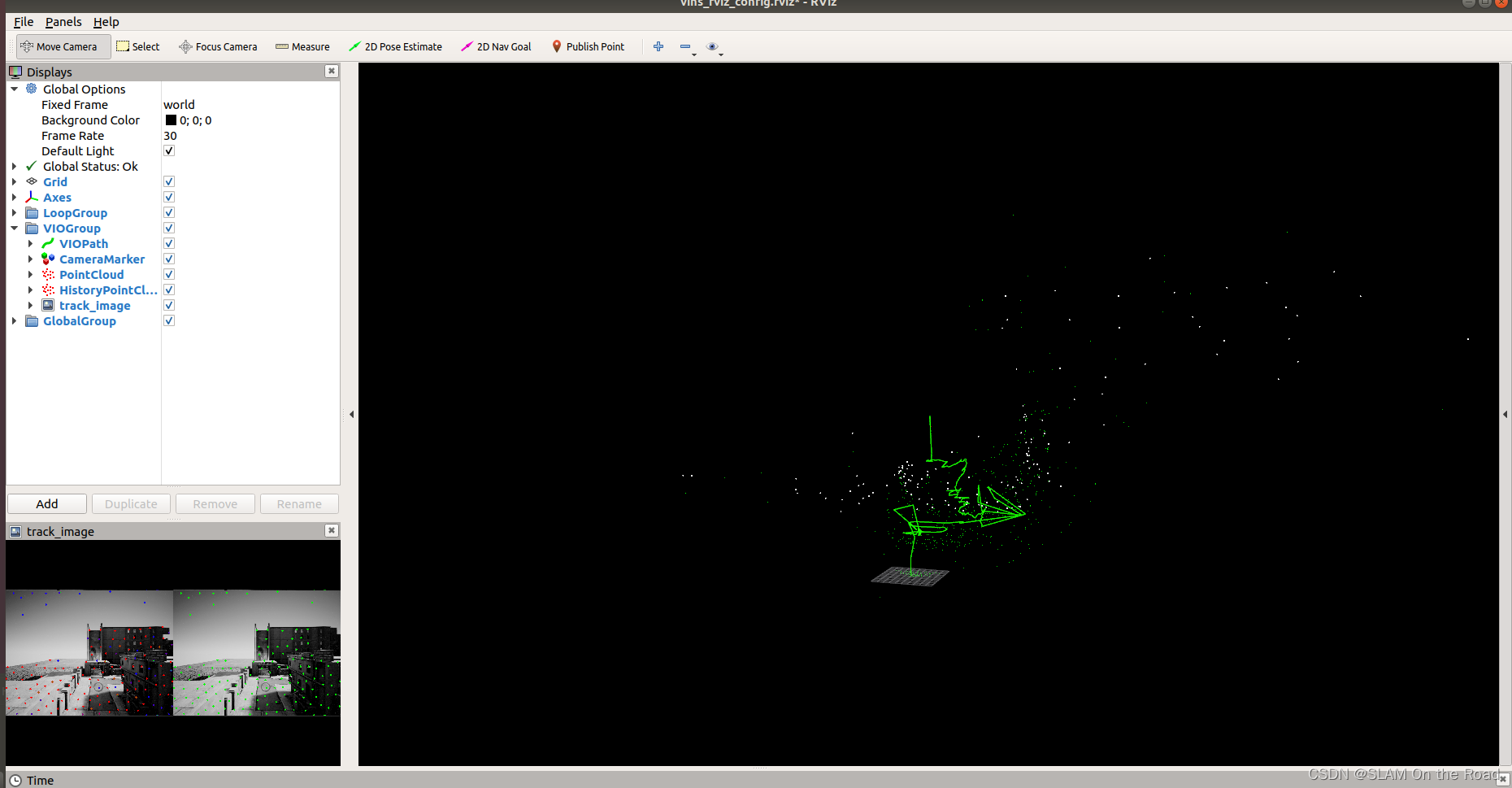
- 启动VINS-Fusion
roslaunch vins vins_rviz.launch
rosrun vins vins_node ~/catkin_ws/src/VINS-Fusion/config/euroc/euroc_stereo_imu_config.yaml
(optional) rosrun loop_fusion loop_fusion_node ~/catkin_ws/src/VINS-Fusion/config/airsim/airsim_stereo_imu_config.yaml
- 启动键盘控制脚本
python airsim_keyboard.py
- 同时录制bag数据
录制的rosbag中,包含双目图像和IMU数据,以及无人机的轨迹真值数据。
rosbag record /airsim_node/drone_1/front_left/Scene /airsim_node/drone_1/front_right/Scene /airsim_node/drone_1/imu/imu /airsim_node/drone_1/odom_local_ned
- 录制完rosbag之后,可以参考 “https://github.com/ethz-asl/kalibr/blob/master/aslam_offline_calibration/kalibr/python/kalibr_bagextractor” , 对bag中的数据进行提取。
3.3 运行结果
- 仿真器: 在 simulator_LINUX/Settings/Stereo.json 中,设置 “ViewMode”: “NoDisplay”, 可以提高图像输出帧率。
- OpenVINS
- VINS-Fusion
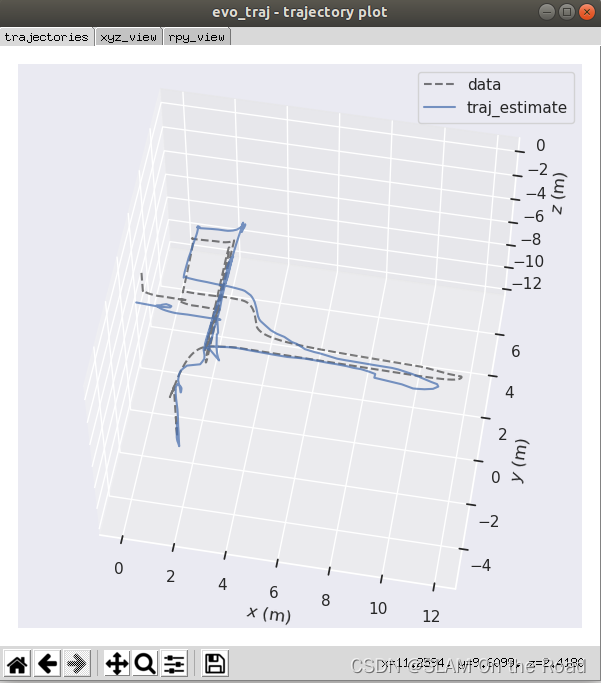
- 轨迹对齐
- vio估计的轨迹
OpenVINS 的 airsim.launch 文件中,配置“ dosave ”为“true”, 可以保存下运行轨迹 “traj_estimate.txt”, 并处理为euroc格式 (t, x, y, z, qw, qx, qy, qz )。 - airsim的仿真真值
读取rosbag中的“/airsim_node/drone_1/odom_local_ned” 数据,并保存为euroc格式的轨迹文件,命名为 truth.csv - evo轨迹对齐
evo_traj euroc traj_estimate.csv --ref truth.csv -a -p
3.4 相机和IMU参数配置
参考博客, 可以得到工程“simulator_LINUX/Settings/Stereo.json”中对应的相机参数(kalibr_imucam_chain.yaml)为:
%YAML:1.0
cam0:
T_imu_cam: #rotation from camera to IMU R_CtoI, position of camera in IMU p_CinI
- [0.0, 0.0, 1.0, 0.26]
- [1.0, 0.0, 0.0, -0.0475]
- [0.0, 1.0, 0.0, 0.0]
- [0.0, 0.0, 0.0, 1.0]
cam_overlaps: [1]
camera_model: pinhole
distortion_coeffs: [0.0,0.0,0.0,0.0]
distortion_model: radtan
intrinsics: [268.511881977, 268.511881977, 320, 240] #fu, fv, cu, cv # horz fov is 100 degree
resolution: [640, 480]
rostopic: /cam0/image_raw
cam1:
T_imu_cam: #rotation from camera to IMU R_CtoI, position of camera in IMU p_CinI
- [0.0, 0.0, 1.0, 0.26]
- [1.0, 0.0, 0.0, 0.0475]
- [0.0, 1.0, 0.0, 0.0]
- [0.0, 0.0, 0.0, 1.0]
cam_overlaps: [0]
camera_model: pinhole
distortion_coeffs: [0.0,0.0,0.0,0.0]
distortion_model: radtan
intrinsics: [268.511881977, 268.511881977, 320, 240] #fu, fv, cu, cv # horz fov is 100 degree
resolution: [640, 480]
rostopic: /cam1/image_raw
IMU的噪声参数(kalibr_imu_chain.yaml)这里大致设为:
%YAML:1.0
imu0:
T_i_b:
- [1.0, 0.0, 0.0, 0.0]
- [0.0, 1.0, 0.0, 0.0]
- [0.0, 0.0, 1.0, 0.0]
- [0.0, 0.0, 0.0, 1.0]
accelerometer_noise_density: 2.0000e-3 # [ m / s^2 / sqrt(Hz) ] ( accel "white noise" )
accelerometer_random_walk: 3.0000e-3 # [ m / s^3 / sqrt(Hz) ]. ( accel bias diffusion )
gyroscope_noise_density: 1.6968e-04 # [ rad / s / sqrt(Hz) ] ( gyro "white noise" )
gyroscope_random_walk: 1.9393e-05 # [ rad / s^2 / sqrt(Hz) ] ( gyro bias diffusion )
model: calibrated
rostopic: /imu0
time_offset: 0.0
update_rate: 100.0
airsim.launch 如下:
<launch>
<!-- what config we are going to run (should match folder name) -->
<arg name="verbosity" default="ALL" /> <!-- ALL, DEBUG, INFO, WARNING, ERROR, SILENT -->
<arg name="config" default="airsim" /> <!-- euroc_mav, tum_vi, rpng_aruco -->
<arg name="config_path" default="$(find ov_msckf)/../config/$(arg config)/estimator_config.yaml" />
<!-- mono or stereo and what ros bag to play -->
<arg name="max_cameras" default="2" />
<arg name="use_stereo" default="true" />
<arg name="bag_start" default="0" /> <!-- v1-2: 0, mh1: 40, mh2: 35, mh3: 17.5, mh4-5: 15 -->
<arg name="bag_rate" default="1" />
<arg name="dataset" default="2022-08-24-10-59-44" /> <!-- V1_01_easy, V1_02_medium, V2_02_medium -->
<arg name="dobag" default="false" /> <!-- if we should play back the bag -->
<arg name="bag" default="/media/patrick/RPNG\ FLASH\ 3/$(arg config)/$(arg dataset).bag" />
<!-- saving trajectory path and timing information -->
<arg name="dosave" default="true" />
<arg name="dotime" default="false" />
<arg name="path_est" default="/tmp/traj_estimate.txt" />
<arg name="path_time" default="/tmp/traj_timing.txt" />
<!-- if we should viz the groundtruth -->
<arg name="dolivetraj" default="false" />
<arg name="path_gt" default="$(find ov_data)/$(arg config)/$(arg dataset).csv" />
<!-- MASTER NODE! -->
<node name="ov_msckf" pkg="ov_msckf" type="run_subscribe_msckf" output="screen" clear_params="true" required="true">
<remap from="/cam0/image_raw" to="/airsim_node/drone_1/front_left/Scene" />
<remap from="/cam1/image_raw" to="/airsim_node/drone_1/front_right/Scene" />
<remap from="/imu0" to="/airsim_node/drone_1/imu/imu" />
<!-- master configuration object -->
<param name="verbosity" type="string" value="$(arg verbosity)" />
<param name="config_path" type="string" value="$(arg config_path)" />
<!-- world/filter parameters -->
<param name="use_stereo" type="bool" value="$(arg use_stereo)" />
<param name="max_cameras" type="int" value="$(arg max_cameras)" />
<!-- timing statistics recording -->
<param name="record_timing_information" type="bool" value="$(arg dotime)" />
<param name="record_timing_filepath" type="string" value="$(arg path_time)" />
</node>
<!-- play the dataset -->
<group if="$(arg dobag)">
<node pkg="rosbag" type="play" name="rosbag" args="-d 1 -r $(arg bag_rate) -s $(arg bag_start) $(arg bag)" required="true"/>
</group>
<!-- record the trajectory if enabled -->
<group if="$(arg dosave)">
<node name="recorder_estimate" pkg="ov_eval" type="pose_to_file" output="screen" required="true">
<param name="topic" type="str" value="/ov_msckf/poseimu" />
<param name="topic_type" type="str" value="PoseWithCovarianceStamped" />
<param name="output" type="str" value="$(arg path_est)" />
</node>
</group>
<!-- path viz of aligned gt -->
<group if="$(arg dolivetraj)">
<node name="live_align_trajectory" pkg="ov_eval" type="live_align_trajectory" output="log" clear_params="true">
<param name="alignment_type" type="str" value="posyaw" />
<param name="path_gt" type="str" value="$(arg path_gt)" />
</node>
</group>
</launch>
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)