本文以nodelet_tutorial_math为例来了解nodelet的原理及使用方法,理论知识参考http://blog.csdn.net/zyh821351004/article/details/52143309
代码地址:https://github.com/ros/common_tutorials/tree/hydro-devel/nodelet_tutorial_math
nodelet是什么?
1 ROS的数据通信在graph结构中以topic,service和param的方式传输数据,天生的数据交互存在一定的延时和阻塞。Nodelet 包就是改善这一状况设计的, 使得多个算法运行在同一个过程中,并且算法间数据传输无需拷贝就可实现。 详见http://wiki.ros.org/nodelet。 简单的讲就是可以将以前启动的多个node捆绑在一起manager,使得同一个manager里面的topic的数据传输更快。即同一个manager过程的nodelet数据传输zero copy 。
2 nodelet的manager可以加载多个的nodelets,nodelets间数据传输zero copy,有效避免数据copy和网络传输代价
3 支持pulgin的方式动态加载,基类nodelet::Nodelet, 任何nodelet继承自它可以使用plugin的方式动态加载。
nodelet命令
nodelet load pkg/Type manager //向manager中loader nodelet
nodelet standalone pkg/Type //程序复用,相当启动一个普通node
nodelet unload name manager //从manager移除nodelet
nodelet manager //创建mananger
实例:
rosrun nodelet nodelet manager __name:=nodelet_manager
创建mananger ,名字为nodelet_manager
rosrun nodelet nodelet load nodelet_tutorial_math/Plus nodelet_manager (人工空格) __name:=nodelet1 (人工空格) nodelet1/in:=foo (人工空格) _value:=1.1
使用nodelet_manager 加载nodelet_tutorial_math/Plus ,并且实例化
namespace 重命名为nodelet1。
nodelet1/in 重映射为foo,value的值为1.1
执行完上述两条命令后,可以查看当前的node ,topic列表
$rostopic list
$rosnode list
现在向节点发送topic
$rostopic pub /foo std_msgs/Float64 5.0 -r 10
查看输出结果
$rostopic echo /nodelet1/out
nodelet在launch文件中的使用
//创建manger,名字为standalone_nodelet
使用 standalone_nodelet 加载nodelet_tutorial_math/Plus ,命名空间为Plus,topic可以remap
<launch>
<node pkg="nodelet" type="nodelet" name="standalone_nodelet" args="manager" output="screen"/>
<node pkg="nodelet" type="nodelet" name="Plus" args="load nodelet_tutorial_math/Plus standalone_nodelet" output="screen">
<remap from="/Plus/out" to="remapped_output"/>
</node>
<rosparam param="Plus2" file="$(find nodelet_tutorial_math)/plus_default.yaml"/>
<node pkg="nodelet" type="nodelet" name="Plus2" args="load nodelet_tutorial_math/Plus standalone_nodelet" output="screen">
<rosparam file="$(find nodelet_tutorial_math)/plus_default.yaml"/>
<remap from="Plus2/in" to="remapped_output"/>
</node>
<node pkg="nodelet" type="nodelet" name="Plus3" args="standalone nodelet_tutorial_math/Plus" output="screen">
<param name="value" type="double" value="2.5"/>
<remap from="Plus3/in" to="Plus2/out"/>
</node>
</launch>
运行launch文件
$roslaunch nodelet_tutorial_math plus.launch
$rosnode list
可以看到会启动3个Plus 节点:Plus,Plus2,Plus3
$rostopic list
向节点发送topic
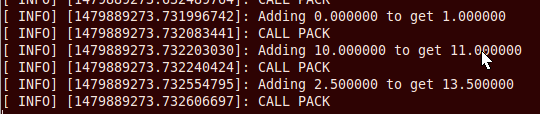
rostopic pub /Plus/in std_msgs/Float64 1.0
结果如下
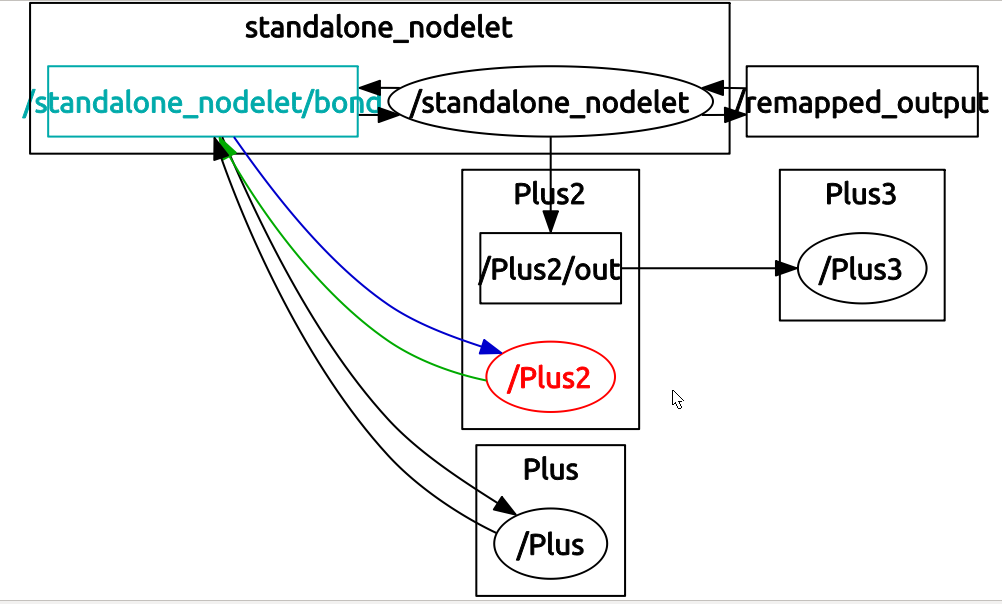
$rqt_graph ,可以直观的看出数据交互的方式
关于Pluginlib,
可以参考http://blog.csdn.net/zyh821351004/article/details/52143309,基本就那几点。
1.为了允许类被动态加载,它必须被标记为导出类。 这通过特殊宏PLUGINLIB_EXPORT_CLASS/PLUGINLIB_DECLARE_CLASS来完成。 这个宏可以放在构成插件库的任何源(.cpp)文件中,但通常放在导出类的.cpp文件的末尾。
PLUGINLIB_DECLARE_CLASS(turtlebot_follower, TurtlebotFollower, turtlebot_follower::TurtlebotFollower, nodelet::Nodelet);
参数:pkg, class_name, class_type, base_class_type
详见plus.cpp,代码很简单就是两个数相加。
2.描述文件
插件描述文件是一个XML文件,用于以机器可读格式存储有关插件的所有重要信息。 它包含有关插件所在的库的信息,插件的名称,插件的类型等
libary path :动态库的相对路径
class 标签描述了由库提供的类。
name:类的查找名称。 由pluginlib工具用作插件的标识符。此字段在pluginlib 1.9和更高版本(ROS Groovy或更高版本)中是可选的
type:类型
base_class_type:基类的类型
description 标签:类的描述和它能做什么
nodelet_math.xml如下:
<library path="lib/libnodelet_math">
<class name="nodelet_tutorial_math/Plus" type="nodelet_tutorial_math::Plus" base_class_type="nodelet::Nodelet">
<description>
A node to add a value and republish.
</description>
</class>
</library>
3.为了让pluginlib查询跨所有ROS包的系统上的所有可用插件,每个包必须显式指定它导出的插件,以及哪些包库包含这些插件。 插件提供程序必须在其导出标记块中的package.xml中指向其插件描述文件。
<export>
<nodelet plugin="${prefix}/plugins/nodelets.xml" />
</export>
详见package.xml
可用的插件查询:rospack plugins –attrib=plugin nav_core //This will return all plugins exported from the nav_core package.
以上就是通过nodelet_tutorial_math 学习nodelet的过程。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)