https://github.com/thien94/vision_to_mavros
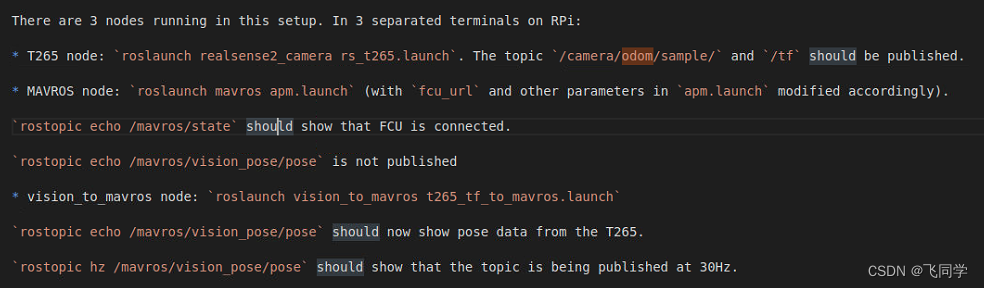
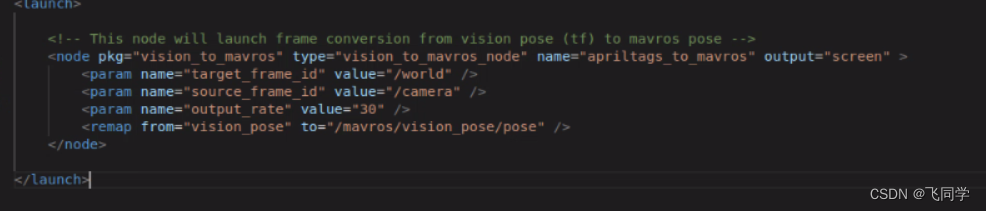
通过话题“/mavros/vision_pose/pose”向PX4发送位置数据
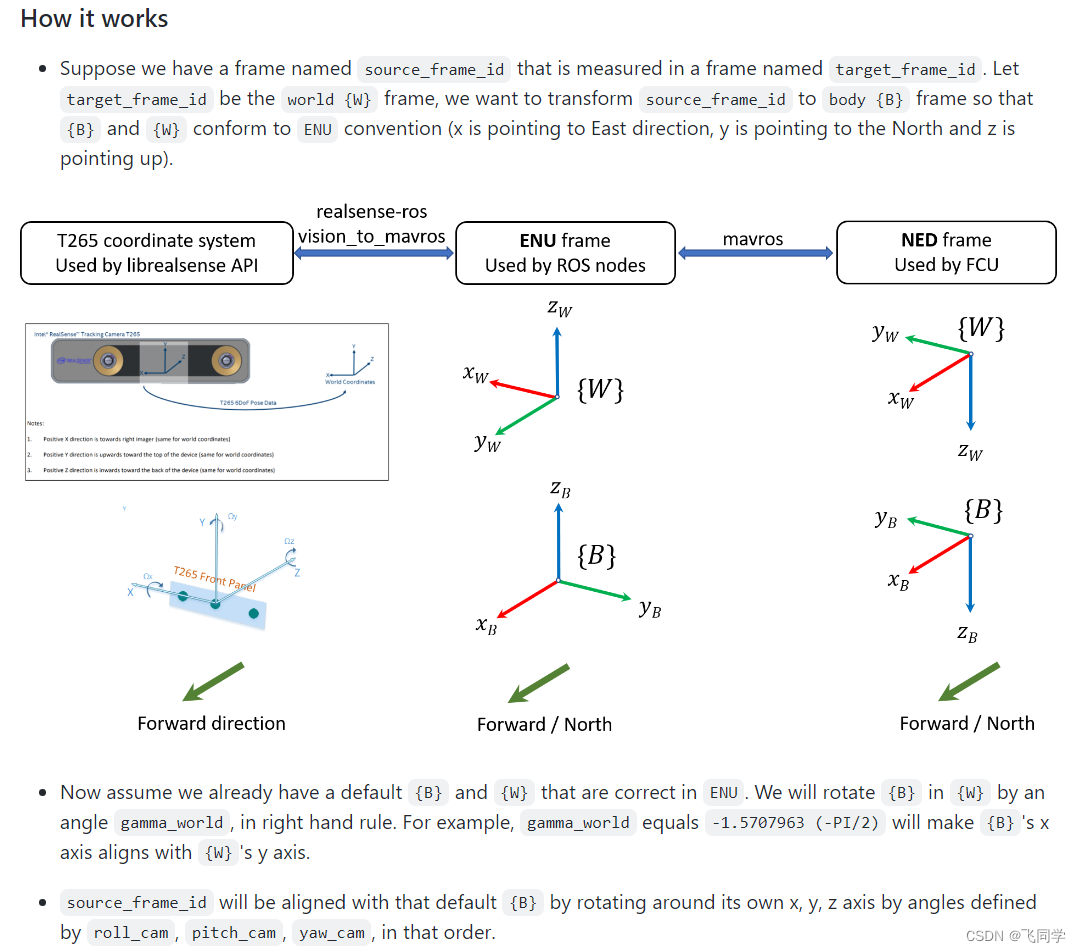
t265两种安装方式:USB口朝右镜头向前和向下安装。如需其它方式安装,参考文件内说明修改相关参数,本文采用向前安装方式
捷径
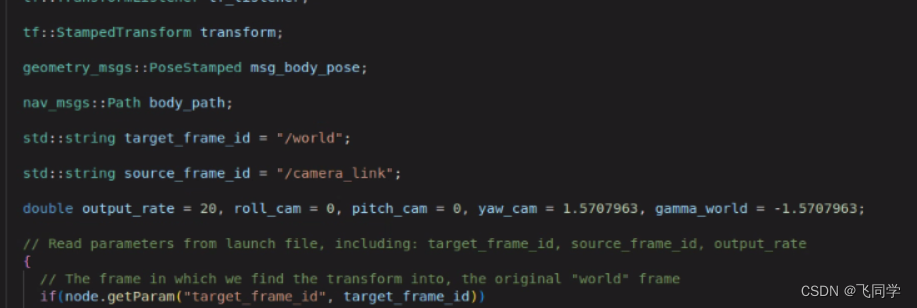
直接通过使用mavros的tf监听功能将定位数据发给PX4,frame_id和child_frame_id之间的tf变换即为定位数据
修改启动mavros时调用的px4_config.yaml文件:
将# vision_pose_estimate中的listen设置为true之后,前面两种通过topic发送定位数据的方法都将失效。修改frame_id、child_frame_id就可以将T265发布的tf定位数据传输给PX4飞控。
# vision_pose_estimate
vision_pose:
tf:
listen: true # enable tf listener (disable topic subscribers)
frame_id: "camera_odom_frame"
child_frame_id: "camera_pose_frame"
rate_limit: 30.0
飞控端设置
EKF2_AID_MASK=280 (vision position fusion、vision yaw fusion、vision velocity fusion)
视觉估计会和px4加速度计估计的差别挺大,导致EKF2融合会出现延迟现象。具体就是飞机急停或者转弯,px4实际融合的位置会延迟或者超调。
EKF2_HGT_MODE=Vision
设置视觉传感器相对于车身的位置
EKF2_EV_POS_X
EKF2_EV_POS_Y
EKF2_EV_POS_Z
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)