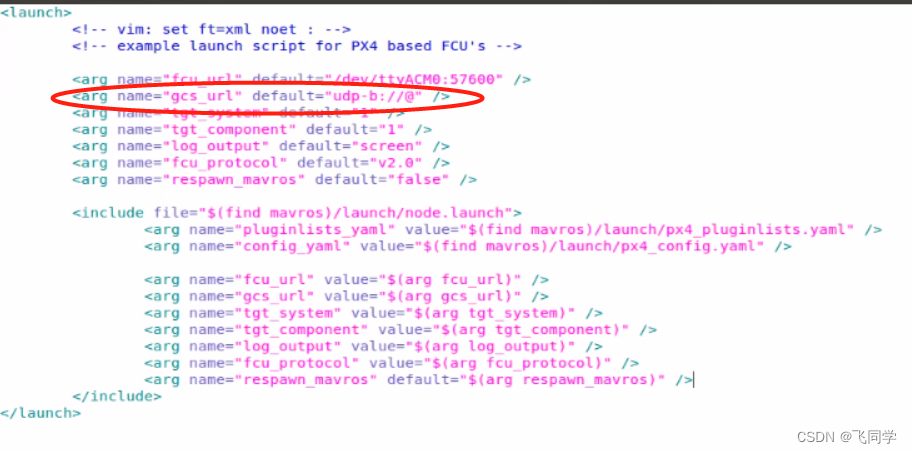
fcu_url指定的是飞控的连接方式,设置飞控为正确的端口即可。 gcs_url指定的是QGC所在主机的IP,这个换为运行QGC主机的IP地址即可 如果不知道主机的IP地址可以用udp发布方式
gcs_url:=udp-b://@
这个会一直寻找地址直到QGC连上为止