1,Realsense sdk安装
git clone https:
下载,运行,有的可能需要sudo
./installLibrealsense.sh
realsense-viewer查看结果
卸载realsense Remove all RealSense™ SDK-related packages with:
dpkg -l | grep "realsense" | cut -d " " -f 3 | xargs sudo dpkg --purge
源码安装 librealsense
下载源码(指定2.24.0版本,为了与realsense-ros版本匹配)
git clone -b v2.24.0 https:
安装依赖(拔掉realsense连接)
sudo apt-get install git libssl-dev libusb-1.0-0-dev pkg-config libgtk-3-dev
sudo apt-get install libglfw3-dev
安装realsense所需的内核模块
cd librealsense
./scripts/setup_udev_rules.sh
./scripts/patch-realsense-ubuntu-lts.sh
#这一条命令执行会比较慢,我是配置了Ubuntu终端翻墙因此速度快一些
编译安装
mkdir build && cd build
cmake ../ -DCMAKE_BUILD_TYPE=Release -DBUILD_EXAMPLES=true
sudo make uninstall && make clean && make -j8 && sudo make install
测试
#打开终端输入以下指令
realsense-viewer
在这里插入图片描述
源码安装Realsense ROS
下载源码并检查依赖(指定版本,与librealsense版本匹配)
sudo apt-get install ros-kinetic-ddynamic-reconfigure
mkdir -p ~/realsense_ros/src
cd ~/realsense_ros/src/
git clone -b 2.2.7 https:
cd ~/realsense_ros
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
echo "source ~/realsense_ros/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
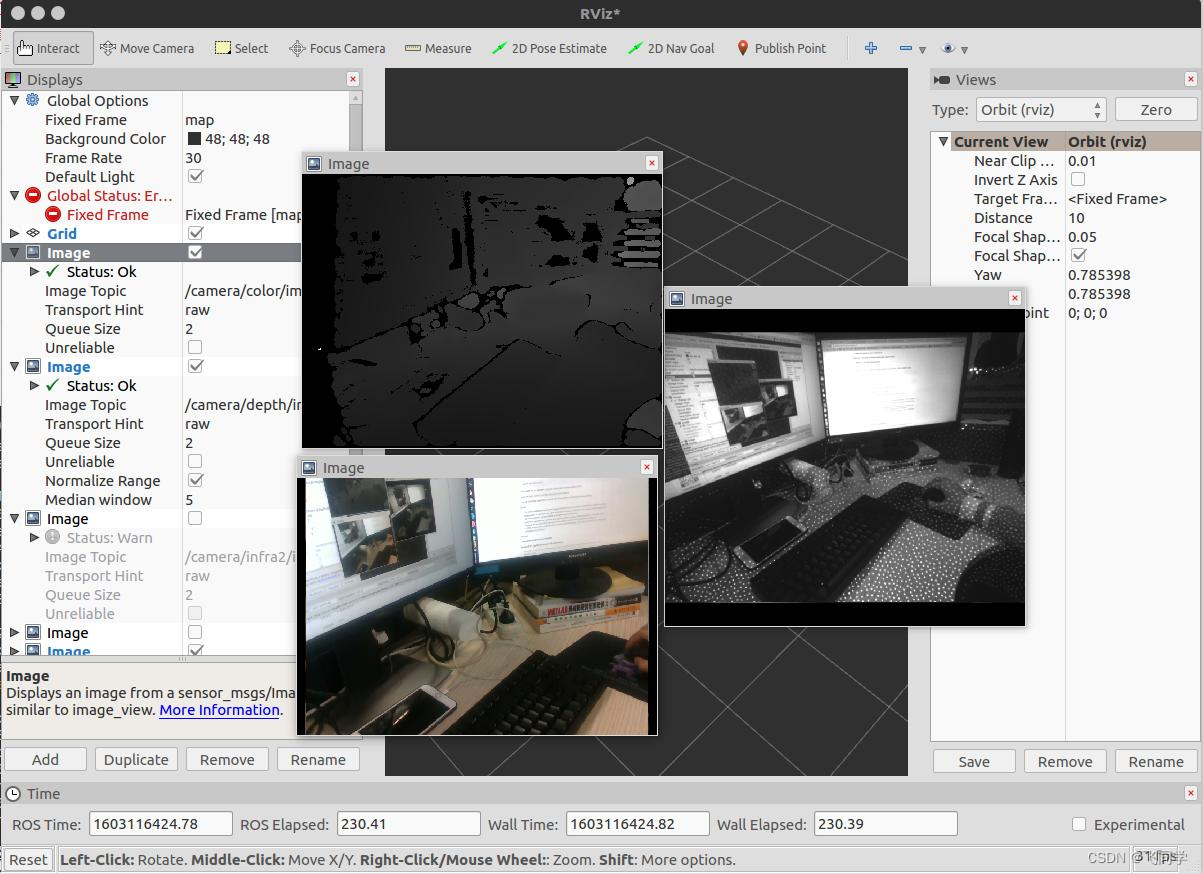
查看rviz
注:https://blog.csdn.net/AnChenliang_1002/article/details/109454465
https://www.freesion.com/article/71881393951/
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)