文章目录
- 搭建ROS虚拟机环境
- 1. 连接小车wifi
- 2. 下载vmware虚拟机
- 3. 下载ubuntu系统镜像
- 4. 远程登录
- 5. 常见问题
- 6. 简单操作演示
搭建ROS虚拟机环境
1. 连接小车wifi
小车开机后会发出wifi,我们可以使用电脑连接其wifi,并进行远程登录,然后即可进行各种ROS功能的使用(ubuntu系统)。也可以给小车外接显示屏、键鼠进行使用。
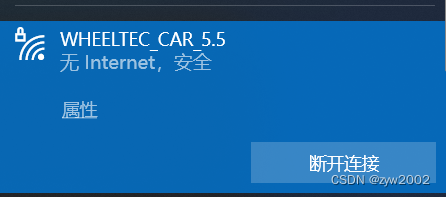
如下图所示,小车的wifi名称是WHEELTEC_CAR_5.5
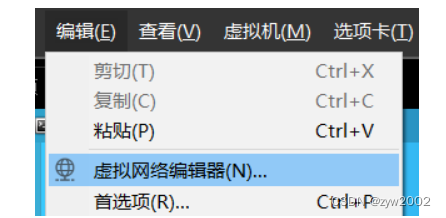
2. 下载vmware虚拟机
下载使用vmware虚拟机
3. 下载ubuntu系统镜像
- 下载ubuntu系统镜像压缩包并解压,使用vmware打开。
虚拟机ROS1_Melodic_Ubuntu18.04镜像
链接: https://pan.baidu.com/s/1Wgghv7fsIopfga7iC4IxkA
提取码: 3kc5
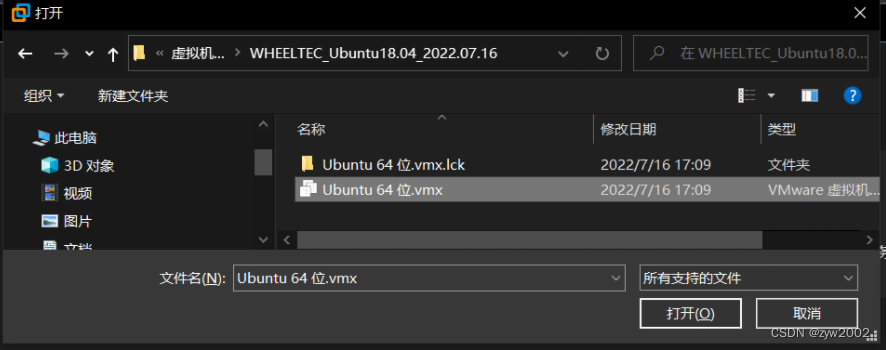
- 用vmware打开解压后的系统镜像, 然后并运行该虚拟机

4. 远程登录
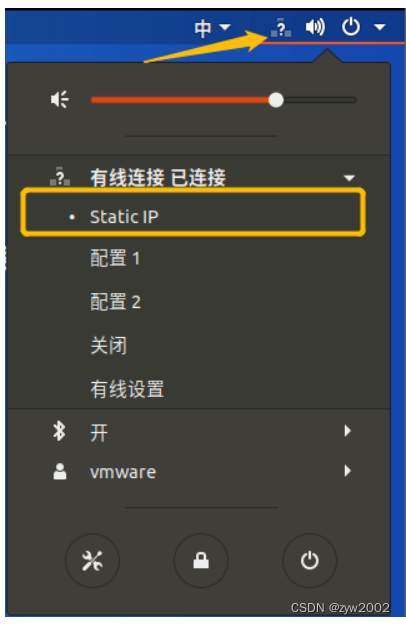
如果选择配置1(ubuntu的默认配置),连接上正常网络时可以正常上网。连接上小车发出的wifi也可以进行远程登录。但是该配置,ip地址可能会发生改变,导航时小车不动。(也就是说ip地址变化了,但是.bashrc文件中的地址没有对应的变化)
ssh -Y wheeltec@192.168.0.100
可能出现如下报错
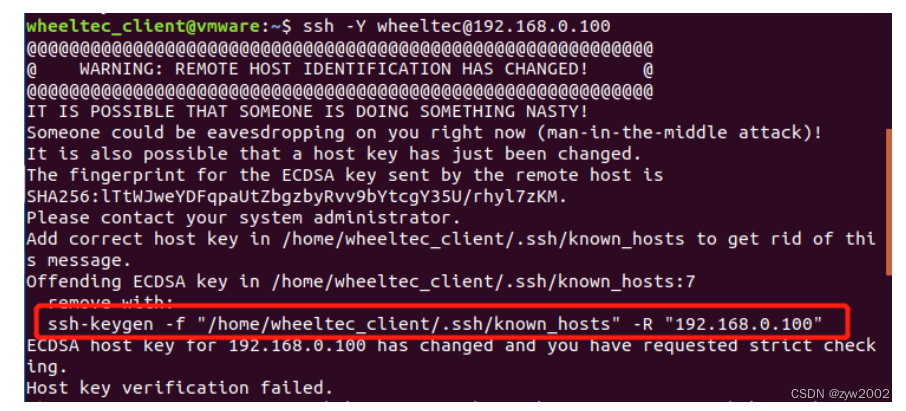
解决方案:
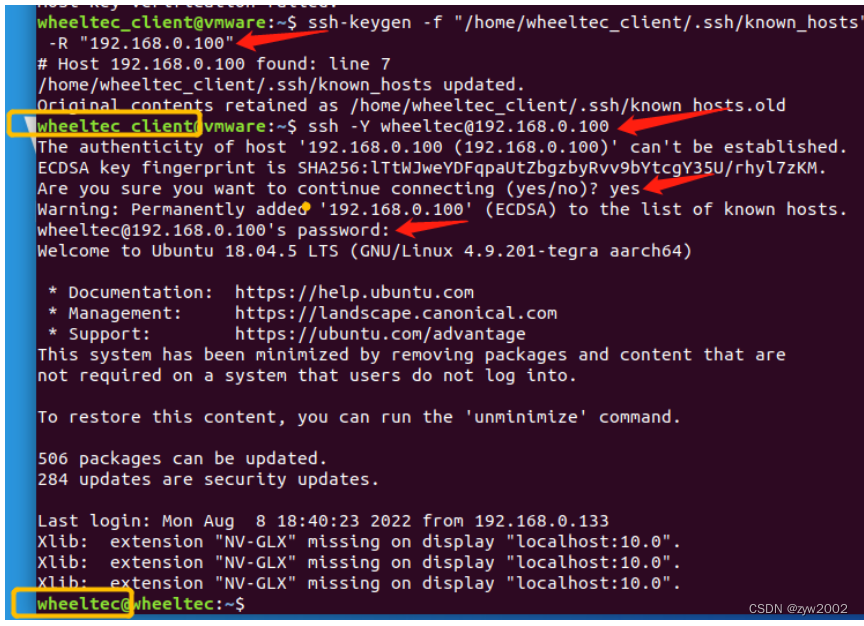
- 复制红框中的命令, 并在终端运行
- 再次输入ssh命令连接
- 选择yes
- 输入密码
- 登录成功,用用户端变成服务端。
5. 常见问题
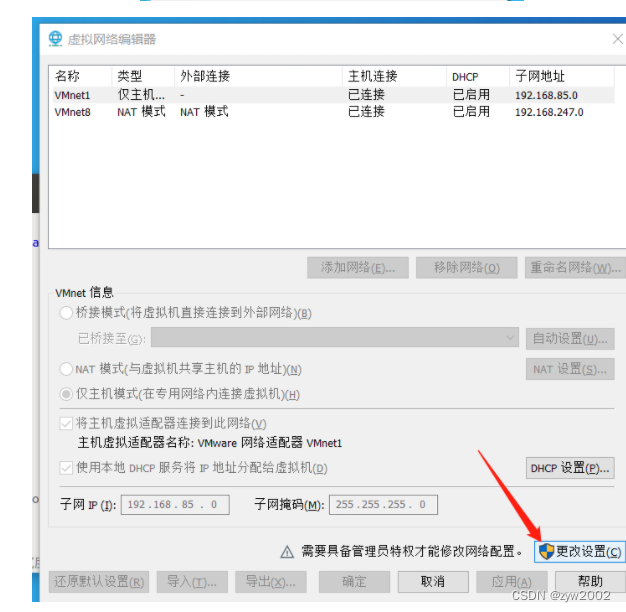
- 无法远程登录的问题

点击【网络适配器】,选择【桥接模式】

6. 简单操作演示
ssh -Y wheeltec@192.168.0.100
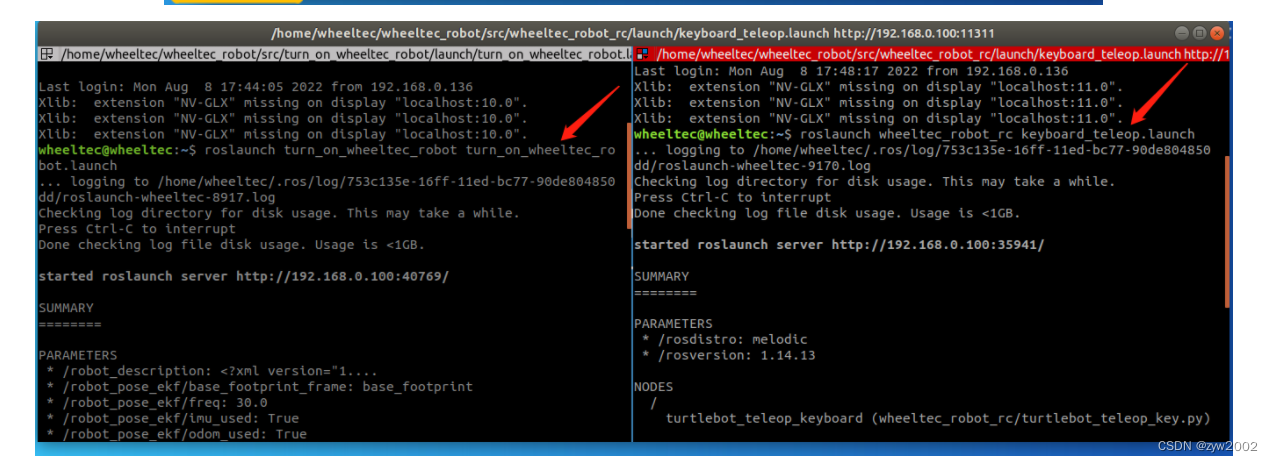
- 一个终端打开小车的控制节点,另一个终端打开键盘的控制节点
roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch
roslaunch wheeltec_robot_rc keyboard_teleop.launch
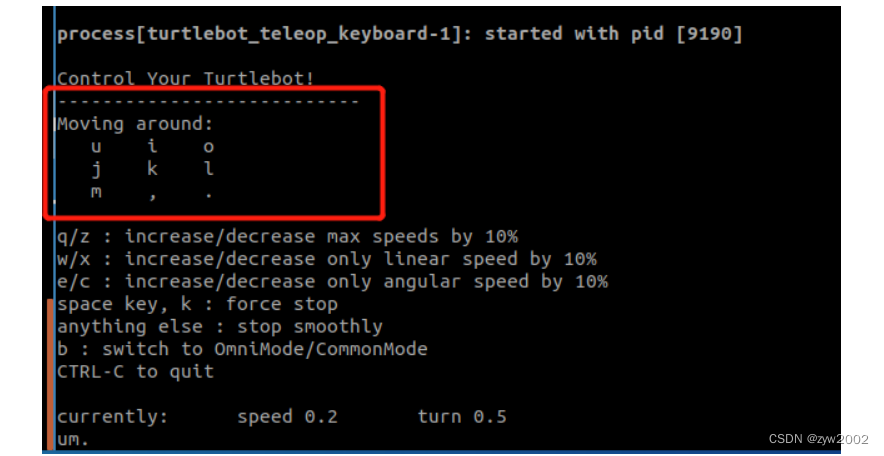
- 键盘输入对应的符号,可以控制小车的移动。例如
i是向前移动,, 是向后移动,u是向左上方移动等。
踩坑记录
小车有两种控制方式,一种是ROS,一种是PS2。
只有当小车是ROS时,才能进行键盘控制
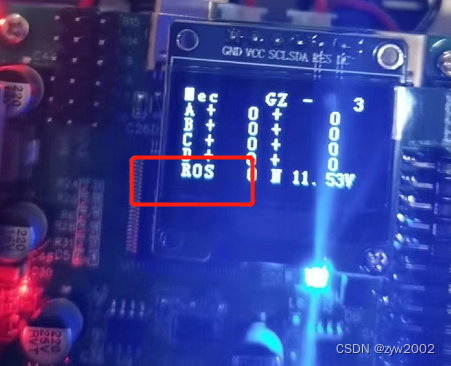
当时PS2时,对应的是手柄控制。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)