写在前面
自己的测试环境: Ubuntu20.04
一、问题描述
自己安装完
anaconda
后,再次执行
catkin_make
遇到如下问题:
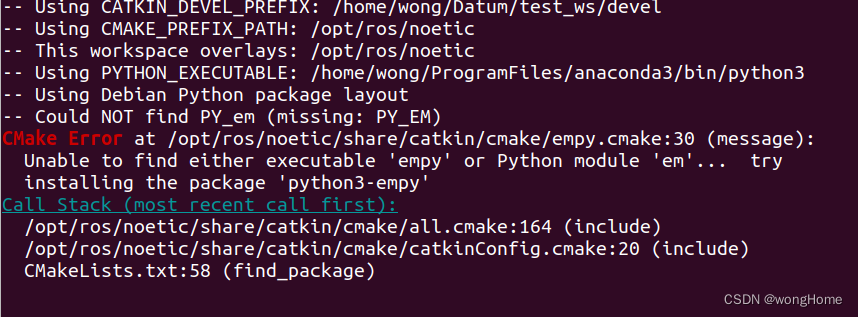
CMake Error at /opt/ros/noetic/share/catkin/cmake/empy.cmake:30 (message):
Unable to find either executable 'empy' or Python module 'em'... try
installing the package 'python3-empy'
报错截图:
二、解决方法
出现这个问题的主要原因是
catkin_make
找到的是
anaconda
下的 python,所以修改成以下指令,即可解决问题:
catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3
参考链接
[1] 南山&M. ubuntu20.04出现Unable to find either executable ‘empy‘ or Python module ‘em‘… try [EB/OL]. https://blog.csdn.net/weixin_44857882/article/details/124296306, 2022-04-20/2024-01-04.
[2] Coffee504. 在安装anaconda后catkin_make不好用 [EB/OL]. https://blog.csdn.net/weixin_63761958/article/details/133123488, 2023-09-21/2024-01-04.