ps:部分内容来自于网络整合
- 首先去官网下载https://www.vmware.com/products/workstation-player.html
- 选择Windows版本,点击DOWNLOAD NOW ,并打开下载的exe文件

- 除了更改安装地址和Enhanced Keyboard Driver,其他都默认安装
- 安装之后需要重启电脑,然后点开VMware Workstation
- 免费使用即可
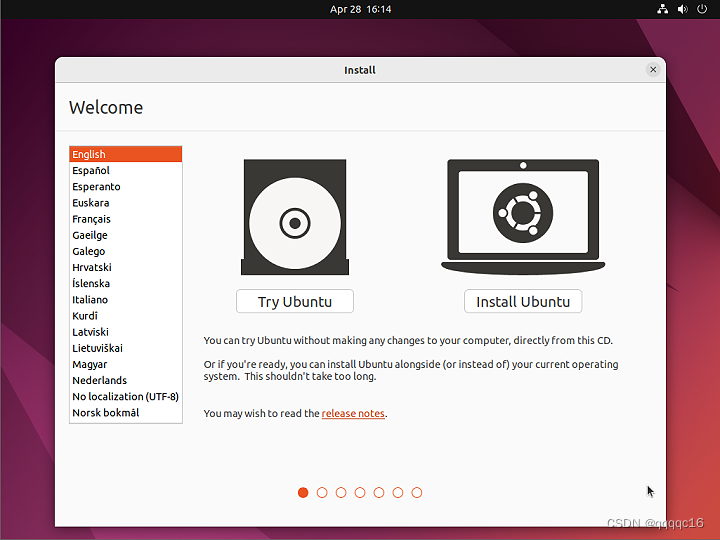
- 然后是安装下载Ubuntu桌面系统 | Ubuntu

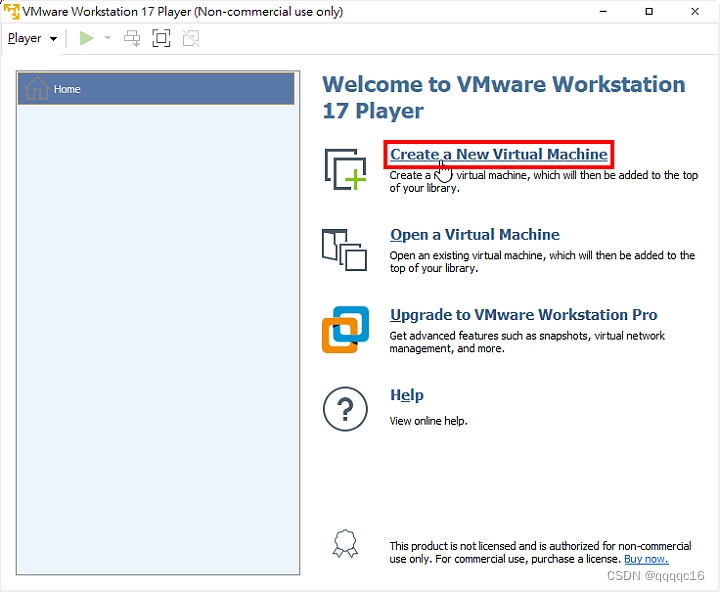

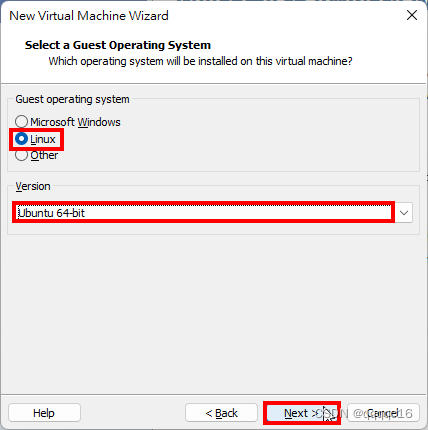
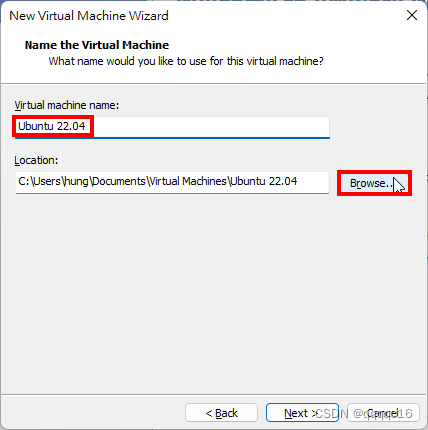
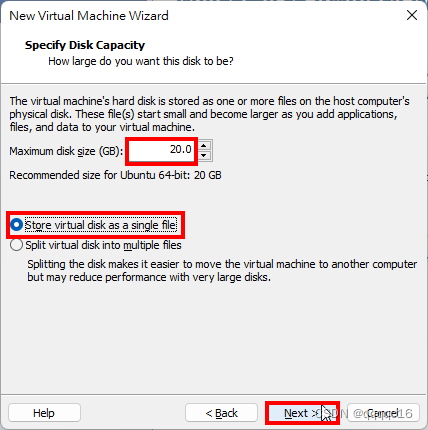
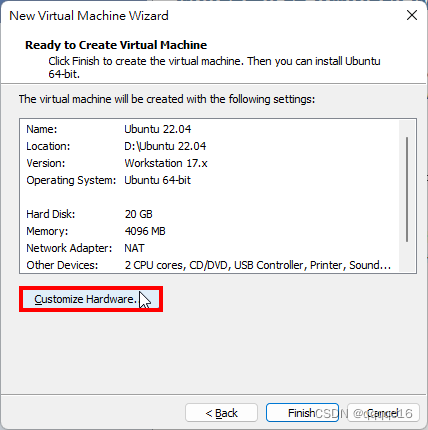

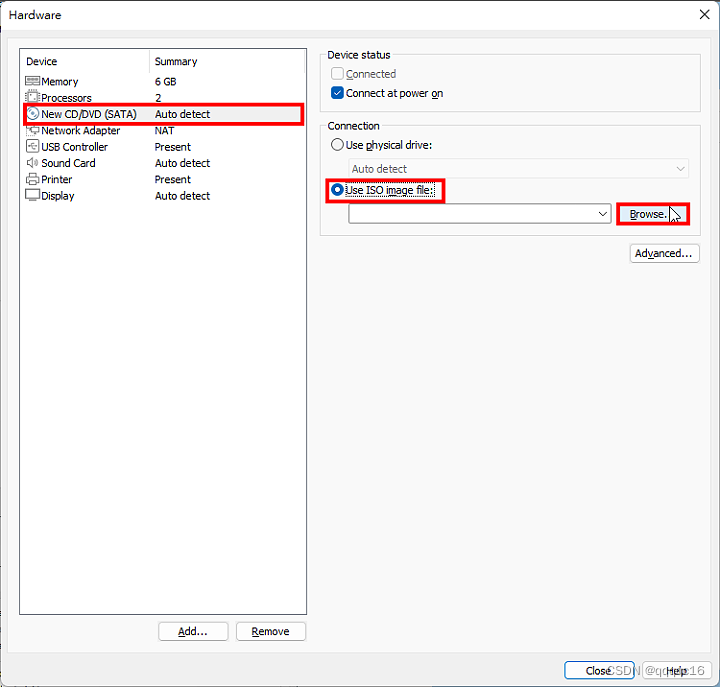
- 然后完成后打开虚拟机配置Ubuntu
- 选择中文安装即可
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)