介绍
硬件平台
控制板:Baize_ServoDriver_esp32
舵机机械臂:
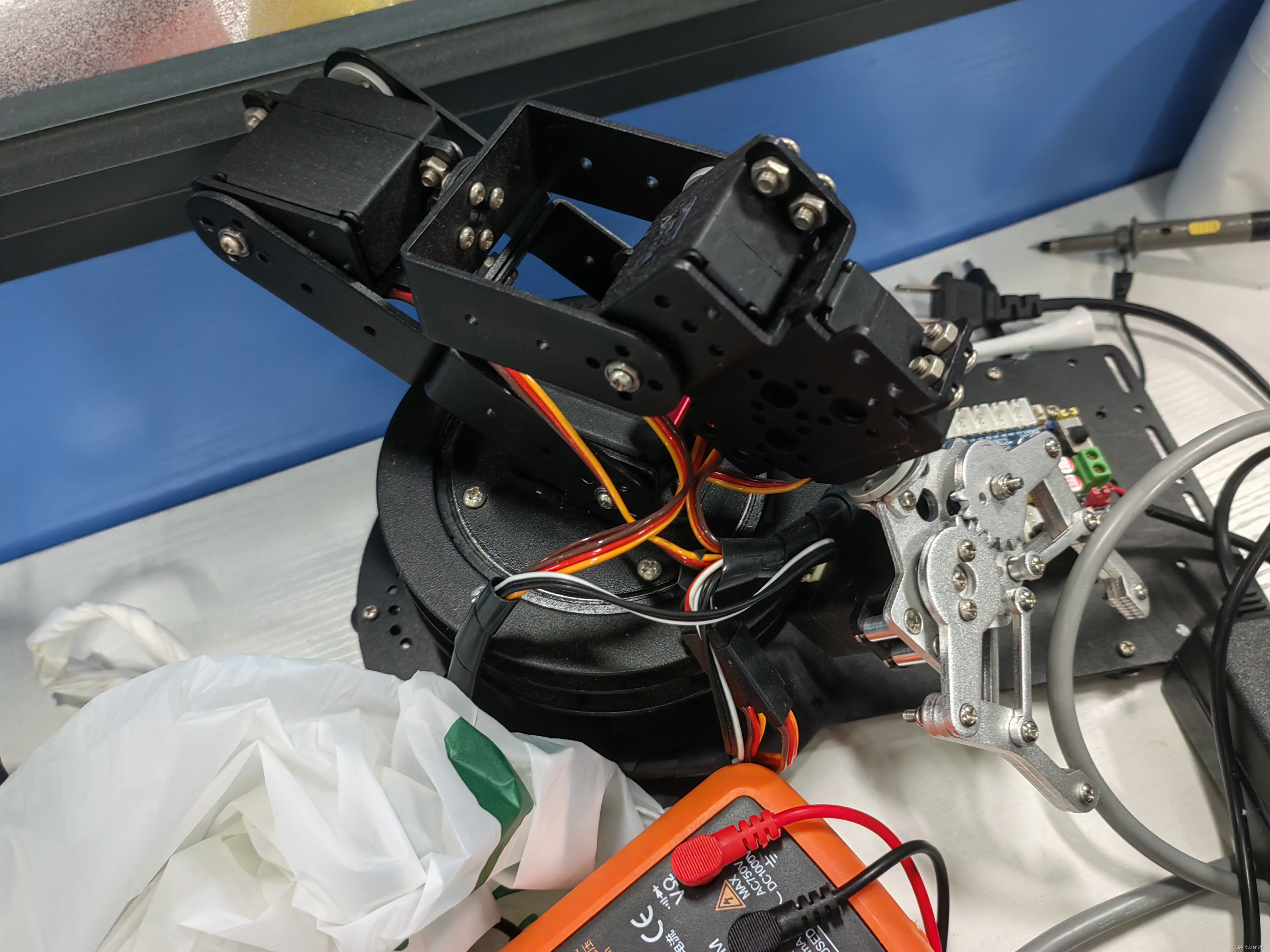
通过Baize_ServoDriver_esp32这块舵机驱动板,我们来驱动我们的机器人。
首先,我们通过串口来订阅我们的自定义话题消息。
具体的话题消息以及定义方式,可以参照下面的仓库
https://github.com/Allen953/Leizhuo_UnderWaterHexapodRobot
然后我们就可以使用这个话题消息了,基于这个话题消息,我们用arduino来订阅这个消息,并显示在显示屏上,我发现当只显示一个joint_states数据时,屏幕的关节角度刷新速率正常,非常快,但是当角度多了之后,速度就变的很慢了,我猜是屏幕刷新速度跟不上,不过这个刷法好像也站不住脚,毕竟我用一个数字进行显示实验的时候,刷新速度是非常快的。所以还是比较疑惑。
代码
1.订阅关节变量消息,并显示在显示屏上
/*
* rosserial Publisher Example
* Prints "hello world!"
*/
#include <ros.h>
#include <std_msgs/String.h>
#include "Leizhuo_UnderWaterHexapodRobot/joint.h"
#include <SPI.h>
#include <TFT_eSPI.h> // Hardware-specific library
TFT_eSPI TFT = TFT_eSPI(); // Invoke custom library
void chatterCallback(const std_msgs::String& msg) {
// TFT.fillScreen(TFT_BLACK);
TFT.setCursor(0, 30, 4);
// Set the font colour to be white with a black background
TFT.setTextColor(TFT_WHITE, TFT_BLACK);
// We can now plot text on screen using the "print" class
TFT.println(msg.data);
}
int m = 0;
void chatterCallbackjoint(const Leizhuo_UnderWaterHexapodRobot::joint& hexapod_joint) {
TFT.fillScreen(TFT_BLACK);
// for(int i=0;i<2;i++)
// {
// for(int j=0;j<3;j++)
// {
// TFT.setCursor(j*70, i*20, 4);
// // Set the font colour to be white with a black background
// TFT.setTextColor(TFT_WHITE, TFT_BLACK);
// // We can now plot text on screen using the "print" class
// TFT.println(hexapod_joint.position[i*3+j]);
// }
// }
// TFT.setCursor(0, 0, 4);
// // Set the font colour to be white with a black background
// TFT.setTextColor(TFT_WHITE, TFT_BLACK);
// // We can now plot text on screen using the "print" class
// TFT.println(hexapod_joint.position[0]);
TFT.setCursor(80, 0, 4);
// Set the font colour to be white with a black background
TFT.setTextColor(TFT_WHITE, TFT_BLACK);
// We can now plot text on screen using the "print" class
TFT.println(hexapod_joint.position[1]);
}
ros::NodeHandle nh;
std_msgs::String str_msg;
ros::Publisher chatter("gun", &str_msg);
ros::Subscriber<Leizhuo_UnderWaterHexapodRobot::joint> subjoint("/hexapod_joint", chatterCallbackjoint);
ros::Subscriber<std_msgs::String> sub("/chatter", chatterCallback);
char hello[13] = "gunnimade!";
void setup()
{
nh.initNode();
nh.advertise(chatter);
nh.subscribe(sub);
nh.subscribe(subjoint);
TFT.init();
TFT.setRotation(3);
TFT.fillScreen(TFT_BLACK);
TFT.initDMA();
TFT.setCursor(0, 0, 4);
// Set the font colour to be white with a black background
TFT.setTextColor(TFT_WHITE, TFT_BLACK);
// We can now plot text on screen using the "print" class
TFT.println("Initialised default\n");
}
void loop()
{
// str_msg.data = hello;
// chatter.publish( &str_msg );
nh.spinOnce();
// time_s = millis();
delay(10);
}
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)