目录
一、简介
二、环境版本
三、学习目标
四、知识储备
五、任务实施
六、任务拓展
七、课堂小结
八、课后练习
一、简介
大家好,欢迎关注遨博学院带来的系列技术分享文章(协作机器人ROS开发),在前面课程中我们讲解了MoveIt!机械臂编程相关知识,接下来我们来学习机器感知与机械臂控制相关课程。今天我们学习“Intel RealSense深度相机ROS驱动”。
二、环境版本
- 主机系统版本:Windwos10 64位
- 处理器型号:Intel-i7
- 虚拟机版本:VMware Workstation 16 Pro
- 虚拟机系统:Ubuntu 18.04.6 LTS
- ROS版本:Melodic
三、学习目标
四、知识储备
下面开始介绍本节内容的知识点:
首先了解深度相机的分类及工作原理。
深度相机根据其工作原理可以分为以下三种:结构光、双目立体测距、时间飞行法(TOF)。

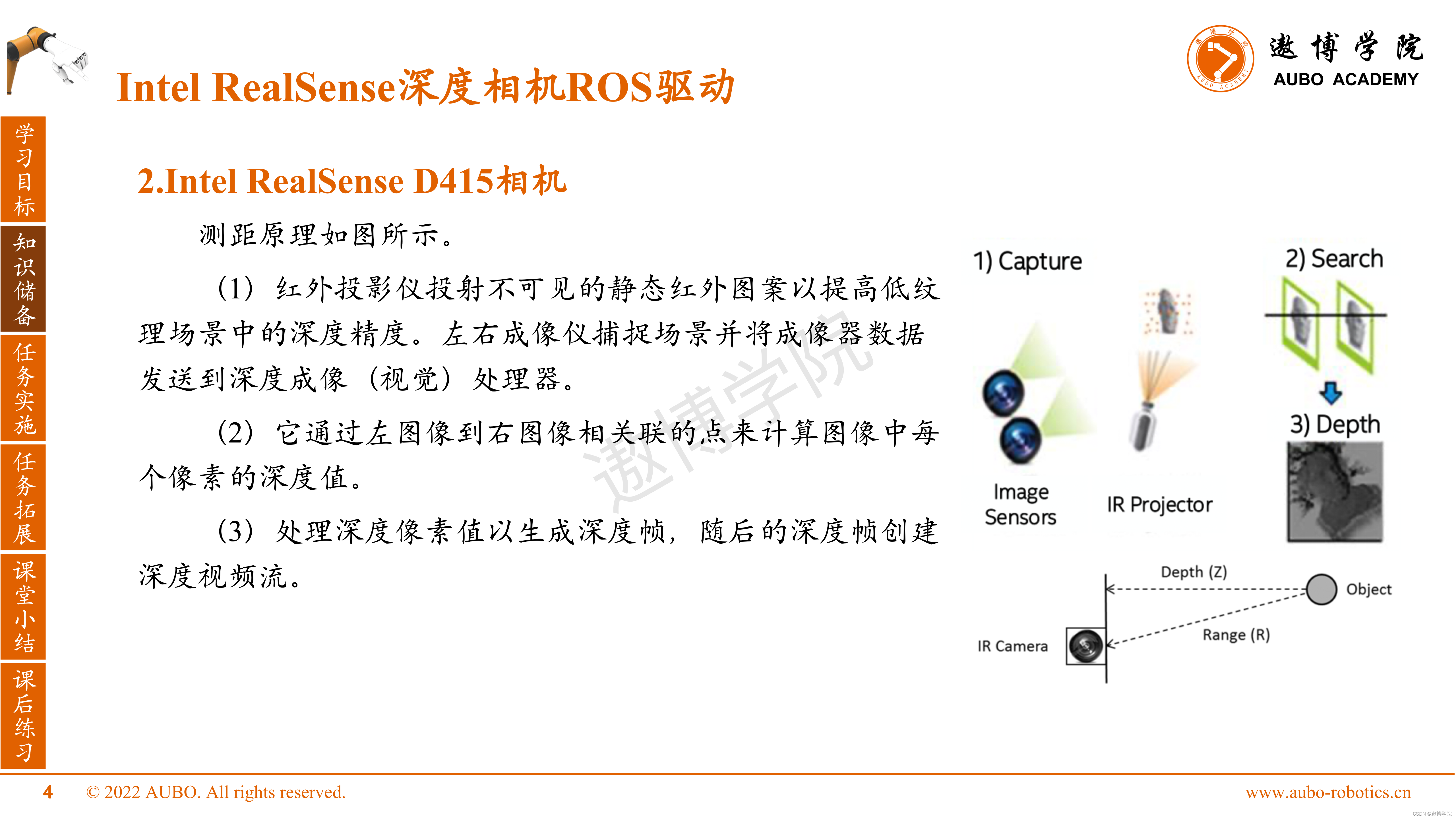
本微课使用的深度相机为Intel RealSense D415,下面了解下其硬件构成及工作原理。D415是一款 USB3.0 Type-C接口供电的深度相机,由一对深度传感器、RGB传感器和红外投影仪组成。产品参数如表所示。

测距原理如图所示。
五、任务实施
任务实施包括以下内容。接下来分别进行讲解与演示。
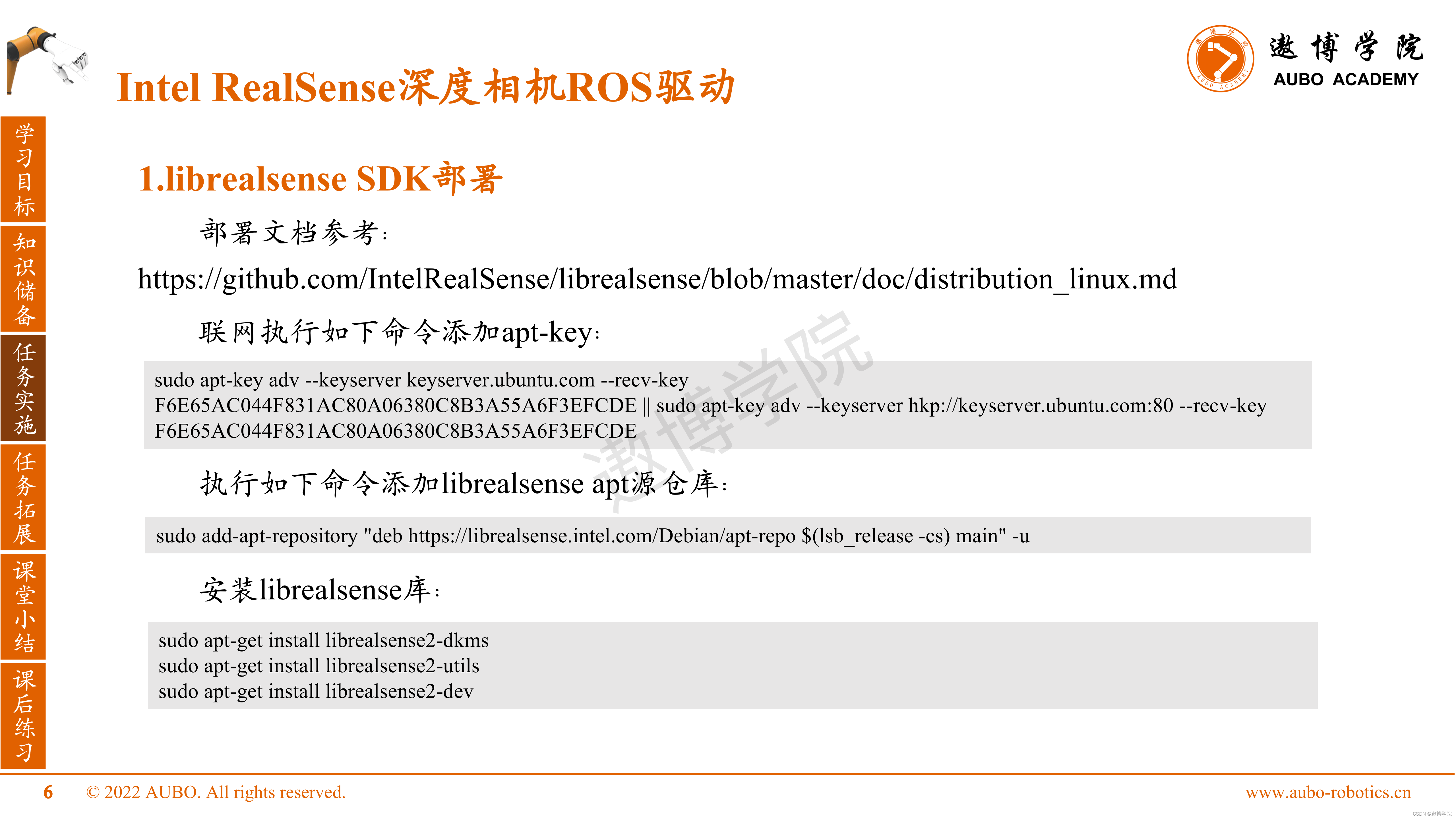
在ROS环境下使用D415相机,首先需要安装部署librealsense SDK,步骤如下。
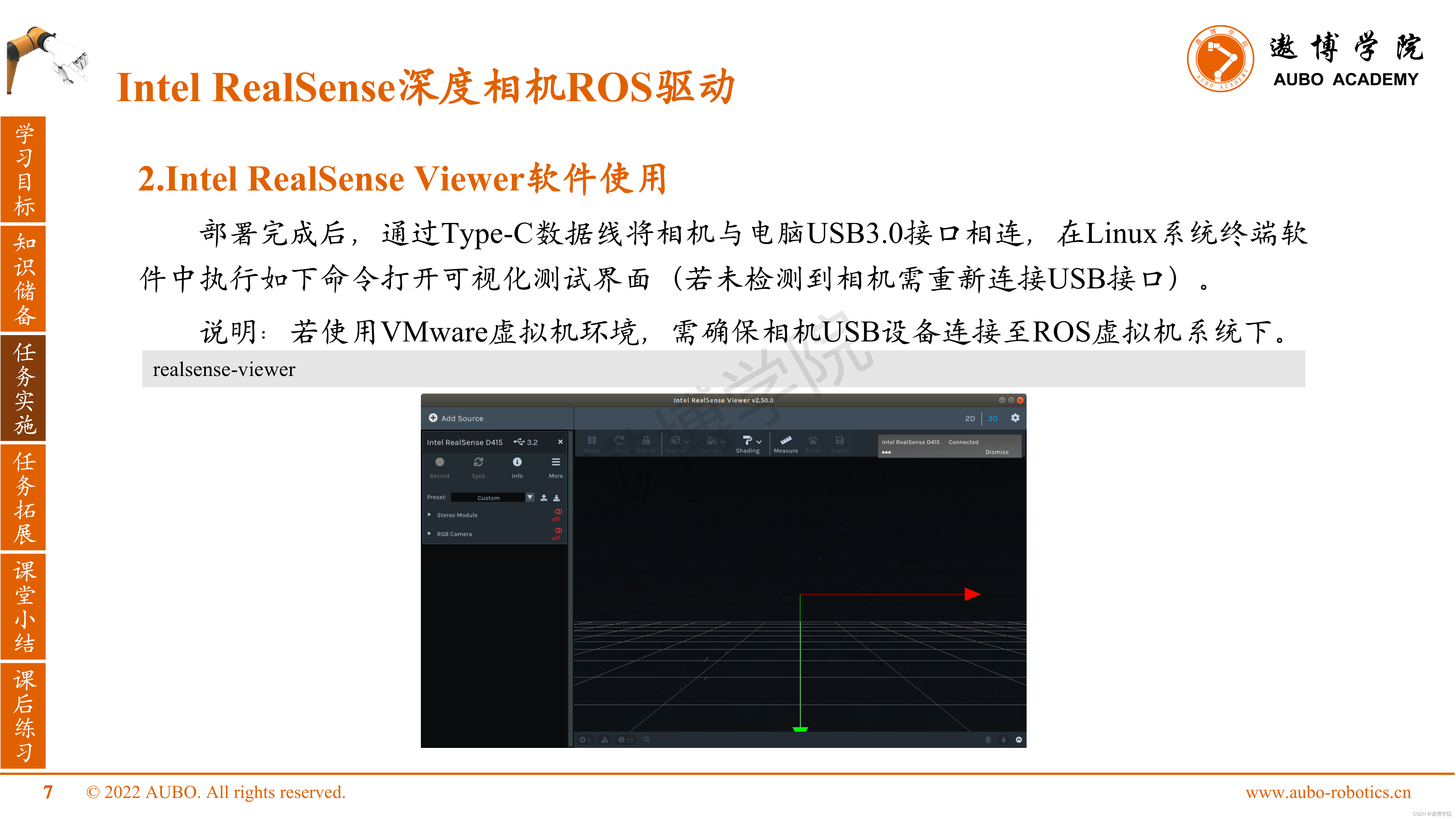
部署完librealsense SDK后,在Linux系统终端界面执行如下命令,可启动RealSense Viewer相机可视化调试软件。
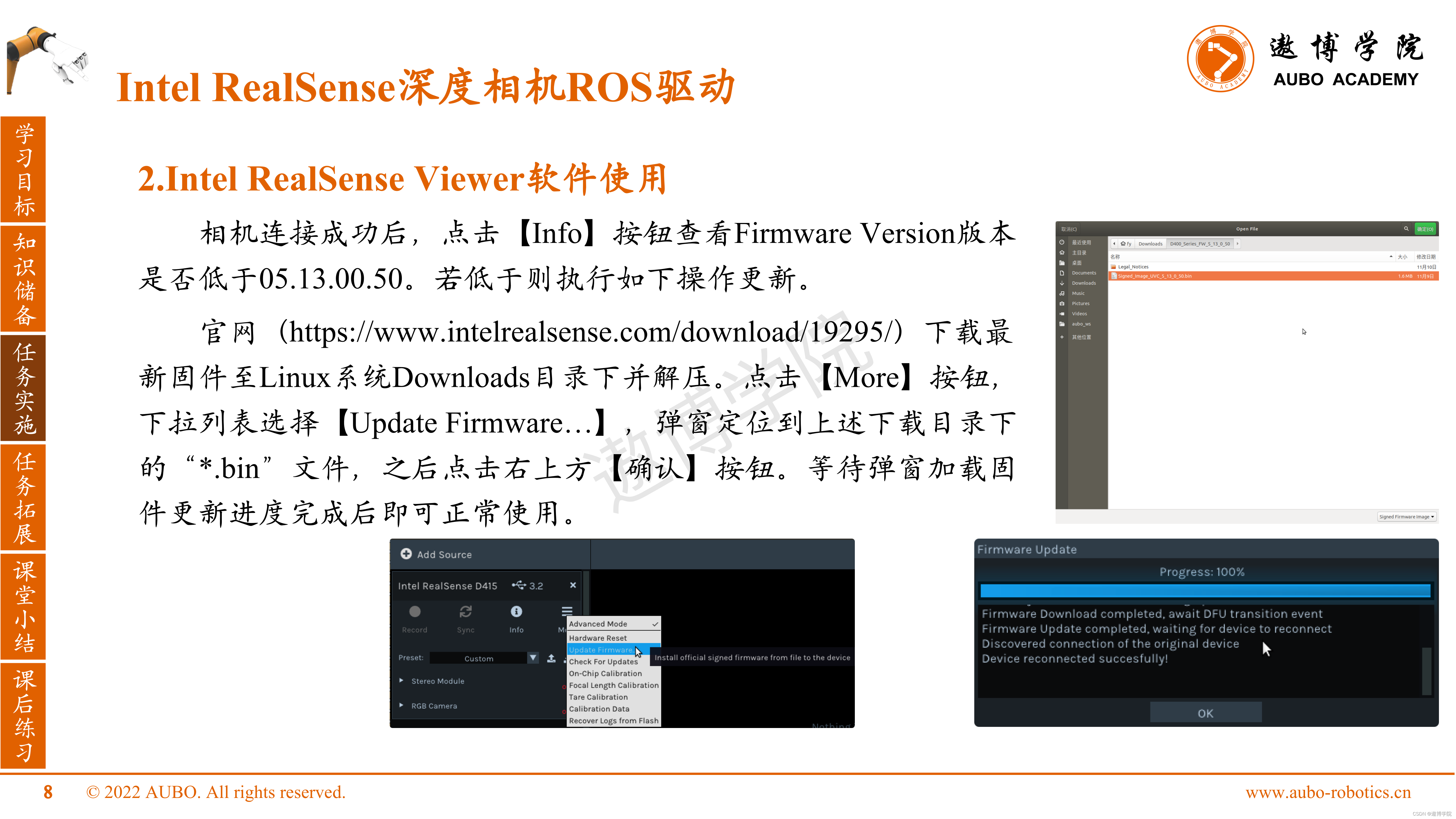
相机连接成功后,点击【Info】按钮查看Firmware Version版本是否过低。更新操作步骤如下。
更新成功后确保相机重连成功,将左侧【Stereo Module】和【RGB Camera】选择“on”状态,右侧会显示深度图像和RGB图像画面。鼠标移动到深度图像位置左下方画面会显示实时测量的深度距离。

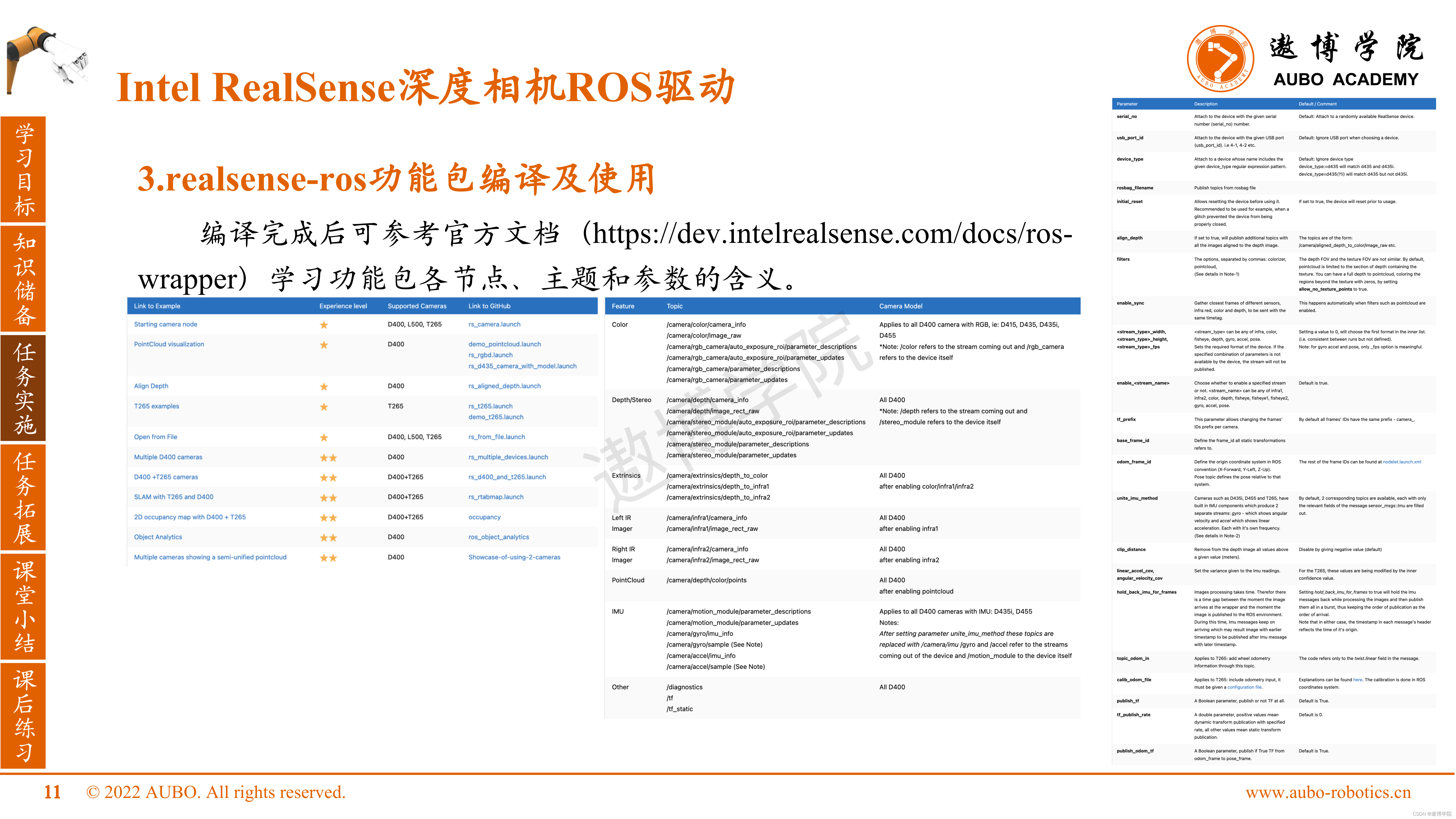
接下来进行RealSense ROS功能包编译。

编译完成后可参考官方文档学习功能包各节点、主题和参数的含义。
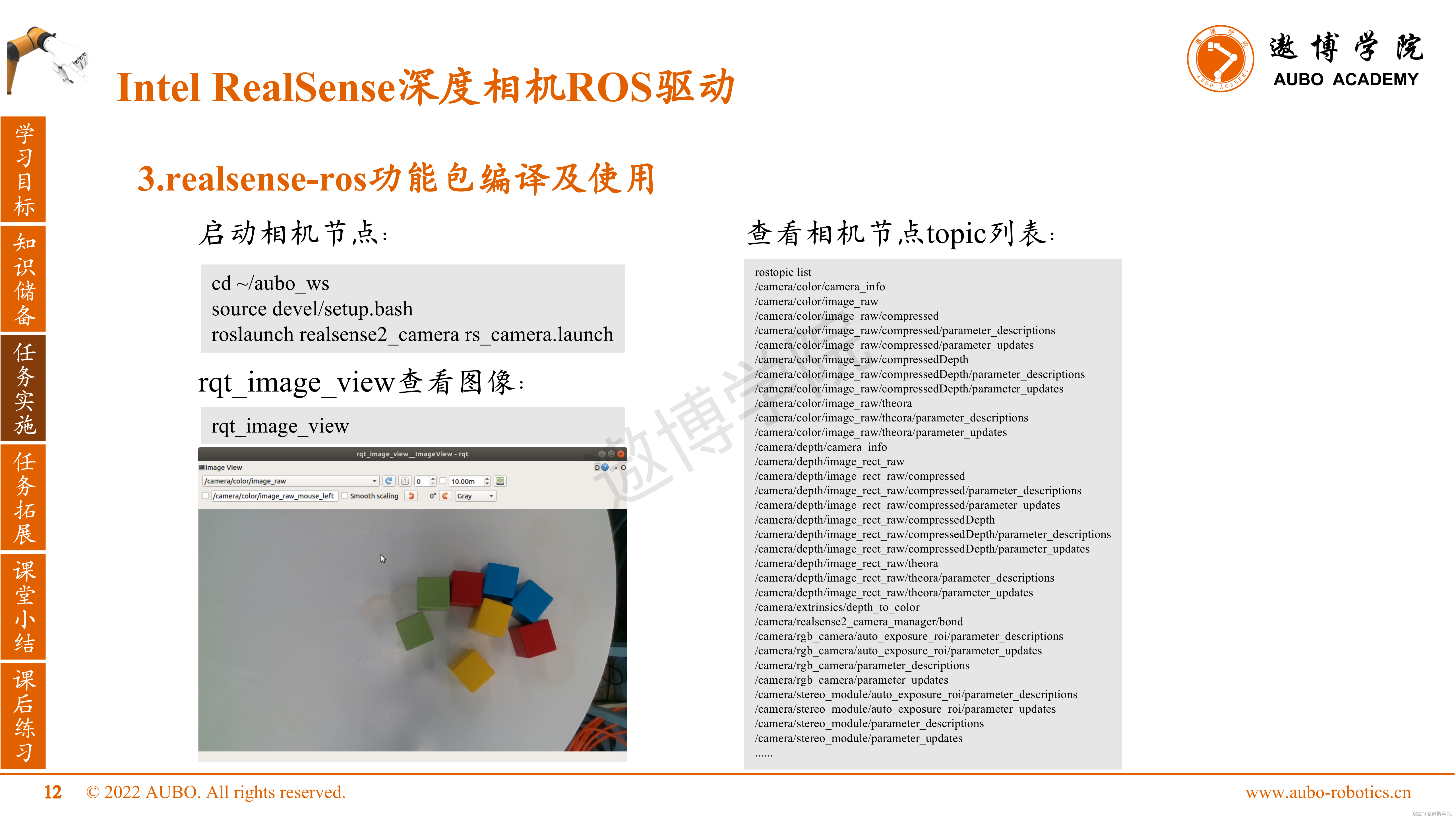
使用RealSense功能包启动相机节点。

六、任务拓展
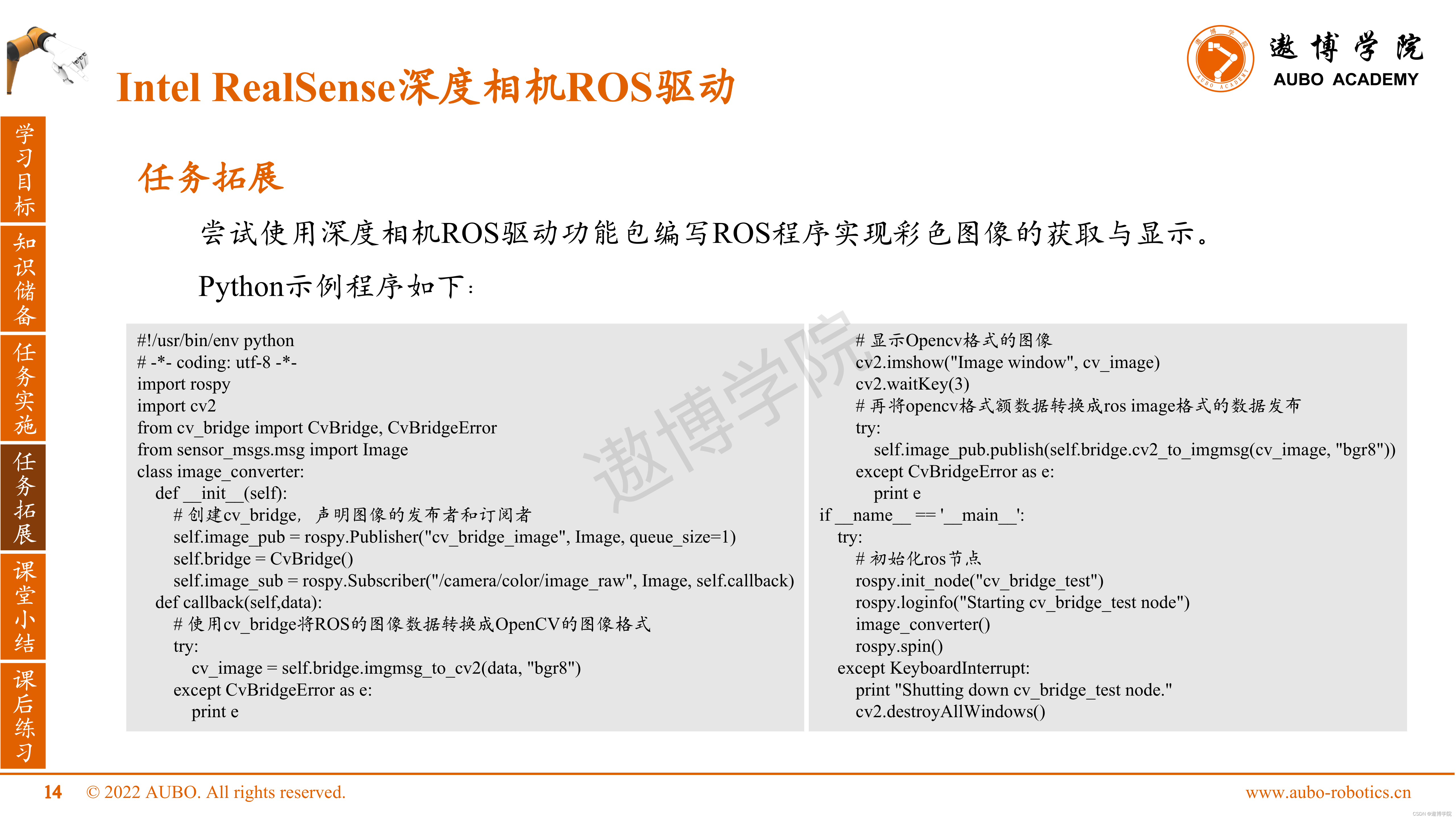
尝试使用深度相机ROS驱动功能包编写ROS程序实现彩色图像的获取与显示。
Python示例程序如下。
七、课堂小结
下面我们进行课堂小结:
1.Intel RealSense深度相机采用USB进行连接,并且可以自己输出相机内参,所以不需要再对其进行内参标定。
2.若更换或延长深度相机数据线,需确保其为USB3.0高速线缆且连接至USB3.0接口使用,否则会出现获取不到彩色或深度图像的问题。
八、课后练习
尝试在遨博学院ROS虚拟机环境下完成Intel RealSense深度相机ROS驱动的编译与测试。
在接下来的ROS课程中,我们会讲解麦克风阵列语音模块ROS驱动开发,欢迎持续关注。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)