前言
想实现px4仿真,考虑使用gazebo仿真。去PX4官网看一眼先,官网提到后面如果要用ROS,直接配置ROS就好了,不然会不兼容,那么就按官网步骤走。
官网步骤
结果第一步就失败了,请看下图。
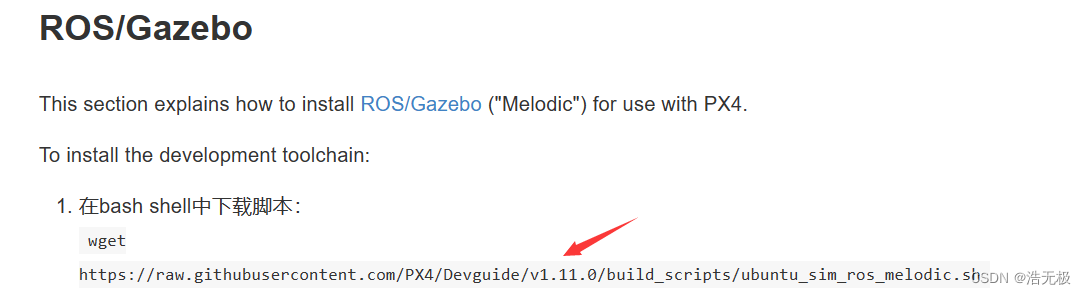
下载不了这个文件,故放弃官网的方法。其实之前我用过百度搜索的方法尝试配置PX4仿真的,问题很多,排除万难。ROS安装成功了,PX4编译成功了,就是死活不能启动PX4仿真。
我决定重新尝试百度的方法,因为之前我的Ubuntu比较杂了,这个也有可能是导致失败的原因。
正如我QGC在之前那个系统里面按官网的方法走死活不成功,甚至怀疑到wsl2原生不支持图形界面的原因,期间又装了虚拟机,装虚拟机还是不好用,Vmware16老卡死,我电脑配置不低,Vmware15就要关闭hyper-v服务,正是关闭了hyper-v服务后面再打开不了wsl2的子系统,所以才重装子系统的。重新装了子系统,QGC按官网方法一试就成功,这让我有了信心。
我之前看过的文章觉得好的都保存下来,这次主要按超维空间科技的方法尝试。这篇文章是我看到这么多文章里面觉得比较可靠的,而且里面很多解决bug确实可行。链接如下:
PX4从放弃到精通(二):ubuntu18.04配置px4编译环境及mavros环境
版本环境
wsl2的子系统 ubuntu20.04,刚装好,无杂七杂八的东西。换了源(新装的Ubuntu系统一般都要换源,Ubuntu系统服务器在国外,不换源下载会很慢,甚至导致失败。),装好QGC。~2022.12.30
orangepi 5 ubuntu20.04 安装成功~ 2023.4.13
步骤
1、sudo apt-get update
先更新一下
2、git clone -b stable https://github.com/PX4/PX4-Autopilot.git --recursive
从仓库下载源码下来
注意:可以尝试用手机热点下载,玄学,能提高下载速度。

3、git submodule update --init --recursive
该命令是把源码下载出错的模块重新下载,反复执行该命令直到没有出错。

如图所示,就是好了。
4、ls
cd PX4-Autopilot
sudo bash ./Tools/setup/ubuntu.sh

大概就是找到ubuntu.sh,然后执行这个文件的意思。
第4步和第3步反复执行,直到第3步所有子模块下载好了,第4步可以有一些错误(类似依赖没有好的问题),在后面编译的时候会提示缺少什么模块的,到时候按提示下载就好了。
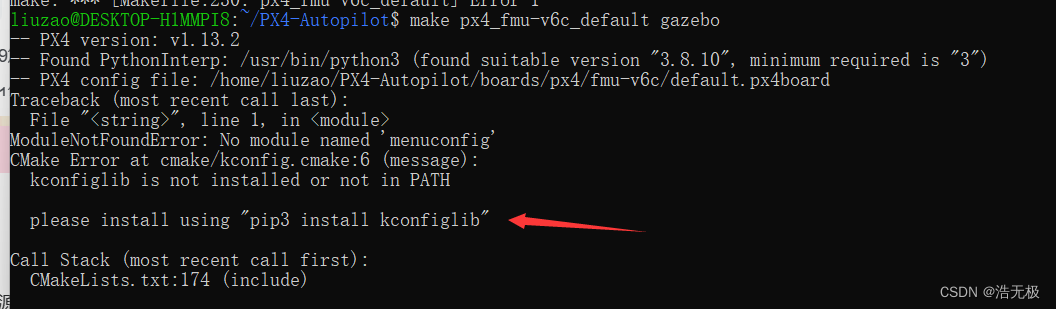
5、执行 make px4_sitl_default gazebo 开始编译并启动gazebo
注意:编译的时候记得要在PX4-Autopilots路径下,不然会报错。
一般这个过程,会报错,按照控制台提示的执行;若还不行,尝试上面文章里面提到的方法。
pip3 install kconfiglib 如图所以,就是典型的控制台提示信息
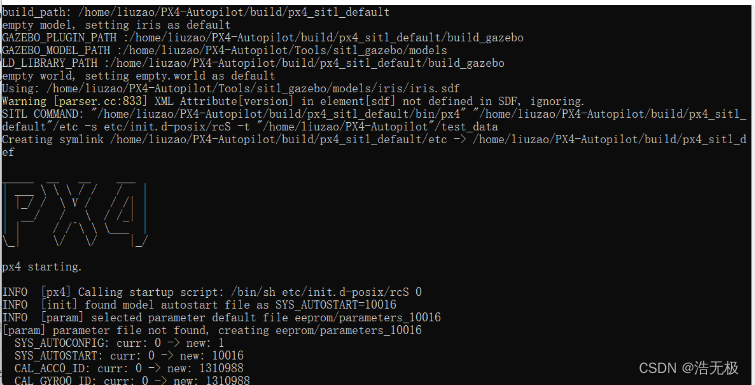
6、出现下图的 PX4 logo 证明编译成功了
7、如果出现打不开 jmavsim 或 gazebo 的问题,请相应查找问题,与PX4编译已经无关了。
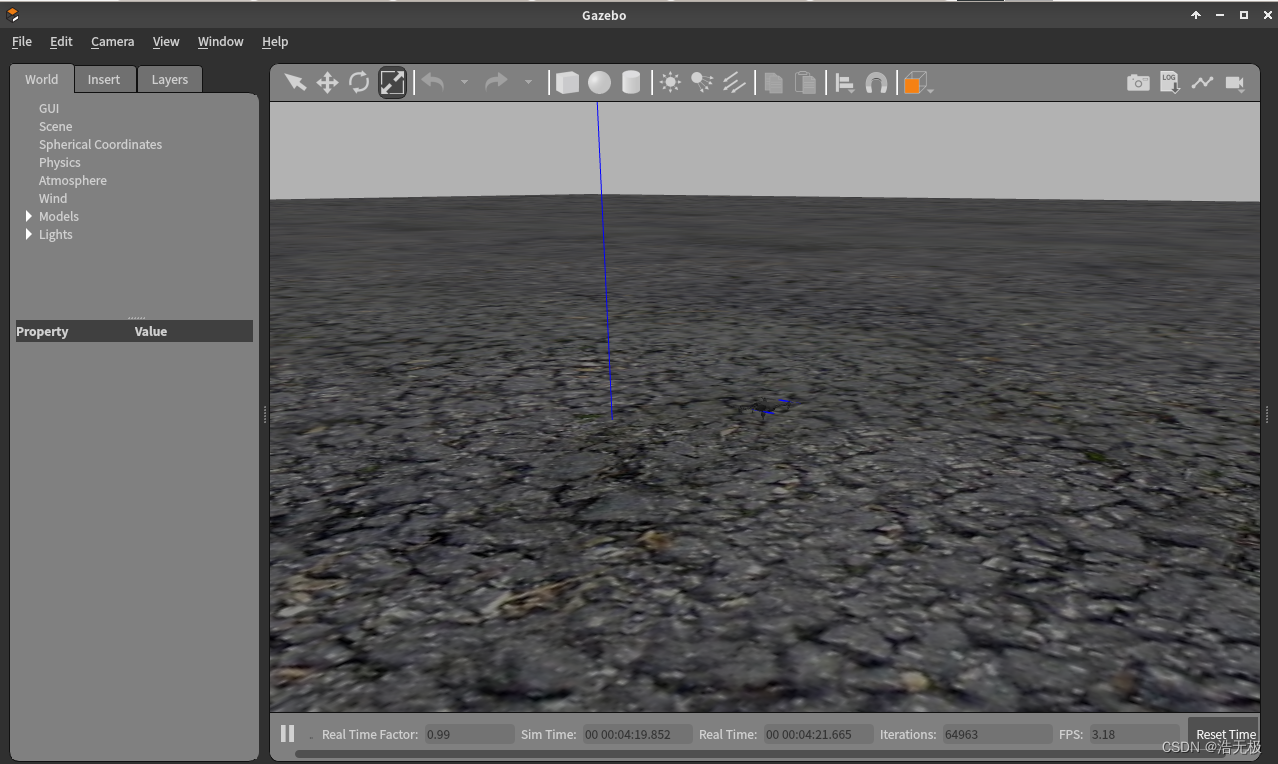
gazebo 里面启动 PX4 界面!
参考资料
鱼香ros一键配置ros系统 真的方便~感谢鱼香大佬做出的贡献!
PX4从放弃到精通(二):ubuntu18.04配置px4编译环境及mavros环境
Ubuntu18.04从零开搭PX4&Mavros&Gazebo环境并测试(极速版)
后话
其实,这篇文章估计也不会帮到大家什么。配置这个环境就是要不停的使错,等到积累到一定程度,才有机会成功。我文中提到的两篇文章都是很好的,多看看。这两篇文章都是等我回头看来,发现很多东西里面提到过,但没有积累是不会看出来的。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)